

5.2. Задающие устройства
Назначение задающего устройства является ввод в систему автоматического управления задающего воздействия, которое в том или ином виде содержит информацию о желаемом течении управляемого процесса.
В замкнутых системах, где осуществляется регулирование по отклонению, задающее устройство вводит заданное значение регулируемой координаты. В разомкнутых системах, где осуществляется регулирование по возмущению, задающее устройство как отдельный элемент отсутствует, и заданное значение регулируемой координаты вводится начальной настройкой системы.
Во всех системах автоматического управления с логическими программами рабочую программу вводит задающее устройство.
Характер задающего воздействия и объем содержащейся в нем информации определяют конструкцию задающего устройства. Простейшими задающими устройствами являются потенциометры, в которых входной величиной является
перемещение, а выходной электрический сигнал (ток, напряжение).
Если же движок потенциометра связан с механизмом, осуществляющим его перемещение в течение рабочего процесса, это будет задающее устройство с переменным задающим воздействием.
Автоматические системы с программным управлением, используемые в промышленности, весьма разнообразны и имеют задающие устройства различной степени сложности.
В простых САУ с постоянной программой без обратной связи в качестве задающих устройств используют командоаппараты, которые могут быть механическими, электрическими, гидравлическими, а также комбинированными.

Рис. 28. Схемы командоаппаратов непрерывного а) и дискретного б)действия.
По виду выходной величины различают командоаппараты непрерывного рис. 28, а) и дискретного рис. 28, б) действия.
Принцип действия командоаппаратов всех типов одинаков, распределительный вал вращается с постоянной скоростью от синхронного двигателя или привода самого автоматизированного устройства, совершая один оборот за заданное время цикла. На валу насажены кулачки, воздействующие на электрические контакты и рычаги, открывающие и закрывающие пневмоклапаны или другие управляющие органы.
Если используется дискретное управление и имеющие цепь обратной связи, то в качестве задающих устройств используют шаговые командоконтролеры или релейные и электронные логические схемы.
На рис. 29 показана схема автоматическое включение вращения шпинделя. После того как будет зажата деталь срабатывает реле давления гидросистемы (РД) и запускает привод шпинделя.
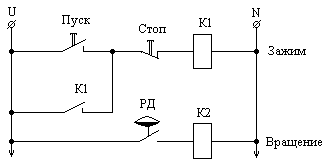
Рис. 29. Релейная схема, выполняющая функции задающего устройства.
Задающие устройства для систем САУ с ЧПУ рассматриваются ниже.
В системах ЧПУ в роли задающих устройств применяют считывающие
устройства для ввода программы в память устройства управления станком. Эти устройства могут переносить информацию в память УЧПУ станка с перфолент, перфокарт, а в настоящее время и с дискет, жестких дисков или с клавиатуры УЧПУ.
5.3. Индикаторные устройства
Важным вопросом при построении САУ является обеспечение высокой эффективности взаимодействия человека с автоматическими устройствами (элементами САУ). Вследствие этого значительно возрастает роль средств отображения информации (СОИ).
Основной функцией СОИ является воспроизведение всей необходимой для работы оператора информации о характере, местоположении и состоянии управляемых объектов, состоянии среды и самой системы. Иными словами, основной функцией СОИ является преобразование поступающей от источников в виде электрических сигналов информации в наглядную информационную модель.
Для современных СОИ характерны широкая микроминиатюризация, резкое уменьшение габаритов и мощности источников питания и возрастание функциональных сервисных и информационных возможностей и гибкости связи между ЭВМ и человеком.
На рис.30 показана структурная схема управляющей системы (САУ) с подсистемой сбора измерительной информации, работающей в режиме реального времени, где x1-xn – контролируемые измеряемые параметры, y1-yk – управляющие воздействия.

ПП –первичный преобразователь; К – коммутатор; РУ - распределительное устройство; КС – канал связи; ПУ – передающее устройство; Д – датчик; ЦПУ – цифровое печатающее устройство; ТКП – табло коллективного пользования; СОИ – система отображения информации.
Рис.30. Структурная схема системы управления с из мерительной подсистемой:
К технике отображения информации предъявляют серьезные требования. Это обусловлено создание комплексов средств отображения информации (КСОИ),
включающих в себе как технические средства визуализации информации со средствами ввода, так и процессы обработки информации с соответствующим математическим обеспечением. Упрощенная классификация СОИ рис. 31, учитывает число операторов, работающих со средствами, назначение средств при решении задач управления, способ визуализации информации, а также физический принцип работы.

Рис. 31. Упрощенная классификация СОИ.
Основными характеристиками СОИ являются следующие.
Быстродействие – характеризует максимально возможный темп приема, отображения и смены информации – время воспроизведения знака, измеряемое от момента поступления кодовой посылки до момента полного образования знака в заданном месте.
Точность воспроизведения информации СОИ должна быть не ниже точности обработки ее техническими средствами, обеспечивающими ввод входных данных. Особенно высокие требования предъявляют к точности СОИ индивидуального пользования, используемых для количественной оценки информации, точных расчетов и графических построений.
Информационная емкость. Под информационной емкостью СОИ понимают максимальное количество информации, которое может быть на нем отображено.
Разрешающая способность. Это один из важных показателей эффективности СОИ, характеризующий способность устройства воспроизводить мелкие детали.
Надежность СОИ. Эффективность использования сложной системы существенно зависит от надежности самой системы. В качестве количественных характеристик надежности СОИ используют вероятность безотказной работы, интенсивность отказов, частота отказов и т. д.
Индикаторные элементы. Различают два основных класса индикаторных элементов: светоизлучающие и модулирующие свет, т. е. изменяющие параметры среды, через которую проходит свет. На рис.32 приведена классификация основных типов элементов, отличающихся по используемым физическим принципам.

Рис. 32. Классификация индикаторных элементов.
Наиболее широко используются полупроводниковые индикаторы (ППИ). Они классифицируются по следующим признакам.
По виду отображаемой информации:
- единичные,
- шкальные,
- цифровые,
- буквенно-цифровые,
- мнемонические.
По виду информационного поля:
- сегментные, одноразрядные и многоразрядные,
- матричные, одноразрядные и многоразрядные,
- экраны и модули экранов.
По способу управления:
- со встроенным управлением,
- без встроенного управления.
Наиболее распространенным видом ППИ следует считать цифровые индикаторы (ЦИ), поскольку подавляющее количество информации воспроизводится в цифровом виде. В настоящее время выпускается свыше 250 типов ЦИ. Все ЦИ по своей конструкции можно разделить на следующие группы: бескорпусные монолитные, монолитные в полимерной герметизации, гибридные с различными светопроводами, монолитные в стеклокерамическом корпусе.
Наиболее распространенными применениями полупроводниковых единичных индикаторов (ЕИ) является: индикация состояния интегральных схем (панелей) и аппаратуры в целом, подсвет надписей и кнопок, создание шкал и табло, излучатели в оптронах.
Представим простейшие схемы подключения единичных индикаторов для индикации состояния приборов рис.33.

а) – состояние микросхемы ТТЛ, б) – в позиционном дисплее с дешифратором.
Рис. 33. Схема управления единичными индикаторами:
Цифровая информация, вырабатываемая вычислительными устройствами аппаратных комплексов, может быть отображена с помощью индикаторов различных форматов, у которых имеется не только разное количество составляющих знак сегментов, но и разная их конфигурация и взаимное расположение.
Существует два метода управления цифровыми индикаторами: управление в статическом режиме (или режим постоянного тока) и в мультиплексном режиме (или режим последовательного стробирования цифр).
Статический режим рекомендуется использовать для управления полупроводниковыми цифровыми индикаторами (ППЦИ) в устройствах отображения информации с малой информативной емкостью.
Мультиплексный режим рекомендуется применять для управления ППЦИ в устройствах отображения информации повышенной и большой информативной емкостью.
Для управления цифровыми ПИ в статическом режиме в настоящее время выпускаются различные микросхемы, например К155ИД1, К514ИД1, с памятью К514ПР1. Схема подключения к микросхеме К514ИД1 семисегментного индикатора на светодиодах типа 3ЛС324А1 представлена на рис. 34.

Рис. 34. Схема подключения ППИ к дешифратору двоично-десятичного кода в семисегментный позиционный код.
На рис. 35 представлена схема управления цифровыми индикаторам в мультиплексном режиме. Для управления пятиразрядными семисегментными индикаторами ИПЦ06А-5/40К с общим катодом разработана микросхема 564ИК2.

DC – дешифратор ДДК для управления 5-разряжного семисегментного индикатора с ОК; R1÷R7 – токоограничивающие резисторы; 1 – входы ДДК по приему данных на одну цифру; 2 – входы DC по приему информации о номере разряда ЦИ, на котором должна индицироваться полученная по входу 1 информация.
Рис.35. Принципиальная схема управления пятиразрядным семисегментным индикатором микросхемой 564ИК2.
Схема работает следующим образом. На вход ИМС поступает две группы информации: двоично-десятичного кода (ДДК) для индуцируемой цифры индикатора и код номера разряда цифрового индикатора, на котором должна быть воспроизведена полученная информация. Микросхема дешифрует код разряда Y0÷ Y2 и подключает низкий логический уровень через один из ключей микросхемы к соответствующему выходу объединенных катодов одного из разрядов индикатора. Одновременно дешифратор по информационному входу 1 дешифрует ДДК и через формирователи токов микросхемы подключает на входы одноименных сегментов индикатора позиционный код цифры. Засветится только та цифра, объединенные катоды которой подключены к низкому логическому уровню. Этот метод управления ППЦИ еще называют динамический, так как индикация всех цифр повторяется поочередно с частотой регенерации не менее 100Гц. К динамической индикации можно также отнести и метод досчета.
Матричные индикаторы или экраны.
Существующие буквенно-цифровые индикаторы позволяют индуцировать большое количество разнообразных символов. Недостатком этих индикаторов является наличие нерабочего поля на их лицевой панели, обращенной к оператору. Наличие нерабочего поля не позволяет индуцировать графическую информацию, то есть создавать экранные индикаторы.
Для создания экранных индикаторов индивидуального пользования и индикаторов типа «бегущей строки» разработаны графические индикаторы, состоящие из 64 (8×8) светящихся элементов. Светодиоды в индикаторе соединены по вертикале и по горизонтали в столбцы и строки одноименными выводами. Такие индикаторы позволяют создавать экранные дисплеи без потери шага размещения светящихся элементов. Выпускаются индикаторы 3ЛС347А, ИПГ02А-8×8Л, ИПГ03А-8×8К. Для управления ими могут быть использованы микросхемы 514Р2А, 514Р2Б и К514ИР2А, К514ИР2Б.
Структурная схема подключения ИМС типа 514ИР2 к графическим полу
проводниковым индикаторам типа 3ЛС347А приведена на рис. 36.

Рис. 36. Структурная схема подключения ИМС 514ИР2А к полупроводниковым индикаторам типа 3ЛС347А (n – число полупроводниковых матриц 8×8 элементов).
Как видно из представленной схемы, для управления группой из n индикаторов необходимо: n+1 микросхем типа 514ИР2А и ключи для подключения соответствующих строк индикаторов к источнику питания. Соединение индикаторов в строку позволяет создавать индикаторное устройство типа «бегущей строки».