

Додаток ж
Таблиця Ж.1 – Варіанти завдань до розрахунково графічної роботи
№ варіанта |
Подвійний блок |
Потрійний блок |
|||
Передавальні відношення |
Передавальні відношення |
||||
1 |
1.26 |
1.58 |
1.06 |
1.41 |
3.98 |
2 |
1.06 |
1.12 |
1.12 |
1.68 |
1.88 |
3 |
1.41 |
2.0 |
1.26 |
2.0 |
0.25 |
4 |
1.06 |
1.41 |
1.41 |
2.0 |
0.25 |
5 |
1.41 |
3.98 |
1.12 |
1.0 |
2.66 |
6 |
1.50 |
2.51 |
2.0 |
1.06 |
1.88 |
7 |
2.82 |
3.16 |
1.06 |
1.12 |
1.19 |
8 |
2.51 |
2.24 |
1.41 |
1.19 |
2.0 |
9 |
1.12 |
1.41 |
1.50 |
1.26 |
1.58 |
10 |
1.50 |
1.78 |
1.78 |
1.33 |
1.88 |
11 |
2.24 |
2.82 |
0.5 |
1.41 |
2.0 |
12 |
3.16 |
0.5 |
2.99 |
1.50 |
0.25 |
13 |
1.06 |
1.26 |
1.12 |
1.58 |
2.24 |
14 |
1.58 |
2.0 |
1.41 |
1.68 |
2.0 |
15 |
2.24 |
3.16 |
1.50 |
1.78 |
2.24 |
16 |
3.98 |
1.50 |
1.68 |
1.88 |
2.66 |
17 |
1.78 |
2.66 |
2.24 |
2.0 |
1.88 |
18 |
3.76 |
4.22 |
1.19 |
2.11 |
1.58 |
19 |
1.12 |
1.26 |
1.41 |
2.24 |
1.58 |
20 |
1.50 |
1.88 |
2.11 |
2.37 |
4.22 |
21 |
2.24 |
2.66 |
2.99 |
2.51 |
1.19 |
22 |
3.16 |
3.98 |
1.33 |
2.66 |
1.12 |
23 |
1.26 |
2.0 |
1.12 |
2.82 |
1.58 |
24 |
1.12 |
2.24 |
1.06 |
2.99 |
1.88 |
25 |
1.50 |
2.51 |
2.24 |
3.16 |
3.76 |
26 |
1.58 |
2.66 |
2.0 |
3.35 |
1.06 |
27 |
1.78 |
2.82 |
1.78 |
3.55 |
2.24 |
28 |
1.88 |
3.16 |
1.68 |
3.76 |
2.66 |
29 |
2.24 |
3.35 |
1.0 |
3.98 |
0.5 |
30 |
2.66 |
3.76 |
2.11 |
4.22 |
1.06 |
31 |
1.26 |
3.98 |
2.24 |
4.47 |
1.12 |
32 |
1.41 |
4.22 |
1.06 |
4.73 |
1.41 |
33 |
1.58 |
1.26 |
1.26 |
1.58 |
1.88 |
34 |
1.78 |
1.12 |
1.33 |
1.68 |
1.06 |
35 |
1.50 |
1.06 |
1.06 |
1.88 |
2.0 |
Додаток К
Програма Кінематика 2000.LT призначена для розрахунку коробок швидкостей і підбору зубчатих коліс подвійних і потрійних блоків методом найменшого спільного кратного.
За допомогою програми можна розрахувати коробки швидкостей:
![]() – з
простою структурою;
– з
простою структурою;
![]() – зі
складеною структурою;
– зі
складеною структурою;
![]() – з
багатошвидкісними електродвигунами;
– з
багатошвидкісними електродвигунами;
![]() – безступінчатим
регулюванням (для діапазону з постійною
потужністю електродвигуна);
– безступінчатим
регулюванням (для діапазону з постійною
потужністю електродвигуна);
![]() – з
безступінчатим комбінованим регулюванням.
– з
безступінчатим комбінованим регулюванням.
Після вибору типу розрахунку необхідно ввести вхідні данні. Подальший розрахунок здійснюється автоматично. Вхідні данні і результати розрахунку записуються у вкладці "Данные"(рисунок К1).
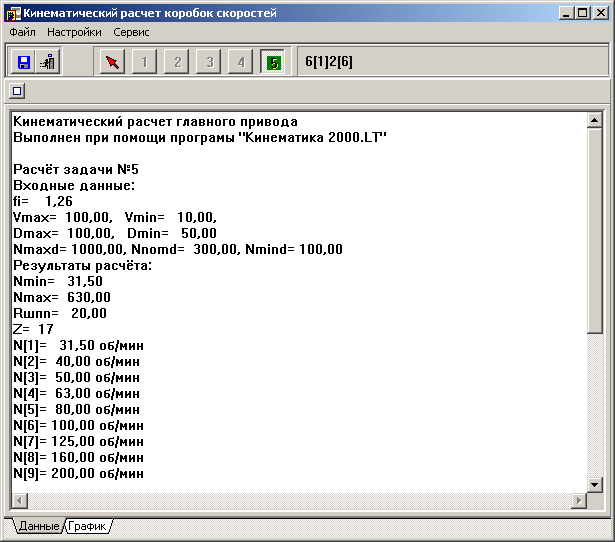



Рисунок К1 – Вікно програми Кінематика 2000.LT (Вкладки "Данные")
Для побудови графіка частот необхідно перейти на вкладку "График" (рисунок К2). Після розрахунку на даній вкладці відображається структурна сітка. Точки на валах можна переміщувати. Для цього необхідно:
Вибрати шаг переміщення (1, 0.5, 0.25 інтервалу або 1 піксель)
Вибрати вал, на якому необхідно перемістити точку.
Перемістити точку на необхідну кількість інтервалів
 .
.
Якщо
передаточне відношення![]() або
або
![]() , то відповідна лінія стає червоню, що
свідчить про необхідність внесення
корекції в графік частот.
, то відповідна лінія стає червоню, що
свідчить про необхідність внесення
корекції в графік частот.
При
необхідності можна очистити поле графіка
![]() ,
відобразити сітку
,
відобразити сітку
![]() і графік
і графік
![]() .
.
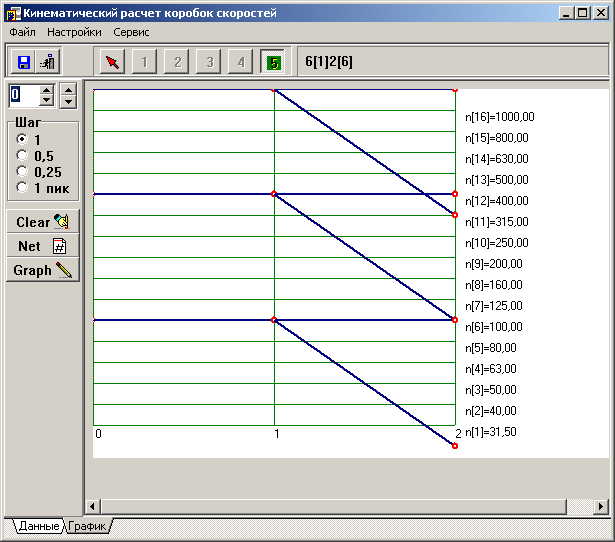


Рисунок К2 – Вікно програми Кінематика 2000.LT (Вкладка "График")
Для
зміни вхідних даних або типу розрахунку
необхідно натиснути на кнопку "Отменить
выбор"
![]() на панелі вибору типу розрахунку і
вибрати необхідний тип розрахунку.
на панелі вибору типу розрахунку і
вибрати необхідний тип розрахунку.
Для отримання точних передаточних відношень по побудованому графіку частот необхідно виконати Сервис | Анализ графика (рисунок К3).
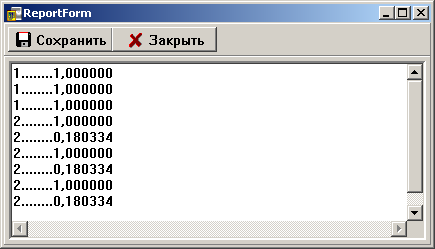
Рисунок К3 – Вікно "Анализ графика"
Підбір зубчатих коліс подвійних і потрійних блоків: Сервис | Расчет зубчатых колес (рисунок К4).
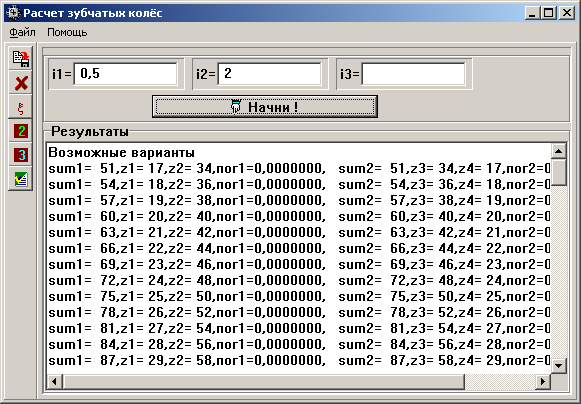
Рисунок К4 – Вікно "Расчет забчатых колес"
ЗМІСТ
Стор.
1 Лабораторна робота №1. Проста структура приводу. ……………… .. 3
2 Лабораторна робота №2. Коробки швидкостей з багатошвидкісними електродвигунами……………………………………………………..…. 13
3 Лабораторна робота №3. Коробка швидкостей зі складеною структурою…………………………………………………………..…… 20
4 Лабораторна робота №4.Коробки швидкостей з безступінчатим регулюванням (для діапазону з постійною потужністю електродвигуна)………………………….……………………………. 32
5 Лабораторна робота №5.Коробки швидкостей з безступінчатим комбінованим регулюванням………………………………………. 45
6 Розрахунково графічна робота………………………………………….... 54
Додаток А ………………………………………………………………..….. 59
Додаток Б ……………………………………………………………...…….. 60
Додаток В ………………………………………………………….…….….. 61
Додаток Д ………………………………………………………….…….….. 66
Додаток Ж ………………………………………………………….……….. 70
Додаток К ………………………………………………………….………... 71