

1.5.Уравнение движения электропривода
Электропривод может работать в разных режимах. Он ускоряется при пуске двигателя или уменьшении (сбросе) нагрузки; замедляется при отключении двигателя или его реверсе. Поведение электропривода в таких режимах зависит от сил и моментов, действующих в его механической части. Для удобства рассмотрения процессов, происходящих в электроприводе, считают одно из двух возможных направлений вращения двигателя за положительное, Т. е. направление, при котором вращающий момент, развиваемый двигателем, совпадает с направлением скорости, а другое—за отрицательное. В соответствии с этим и момент статического сопротивления также может быть как положительным, так и отрицательным.
В системах электропривода основным режимом работы электрической машины является двигательный. При этом момент сопротивления; имеет тормозящий характер по отношению к движению ротора (или якоря) и действует навстречу моменту двигателя.
Поэтому положительное направление момента сопротивлений Мст принимают противоположным положительному направлению момента двигателя.
Если в процессе работы электропривода угловая скорость постоянна, то момент М, развиваемый двигателем, равен моменту нагрузки Мст:
М=Мст. .
или М- Мст =0 (1)
При переменной угловой скорости электропривода — увеличении или уменьшении —возникает динамический момент Мдин и уравнение дополняется третьим членом:
М- Мст = Мдин (2)
Это уравнение называется основным уравнением движения электропривода.
При замене в (1) Мдин его выражением Мдин =Jdw/dt уравнение движения электропривода принимает вид:
М- Мст = J*dw/dt
В общем случае уравнение движения электропривода представляется как:
± М ± Мст = J*dw/dt
При анализе выражения (2) получаем три возможных состояния электропривода:
1) М> Мст — состояние ускорения;
2) М= Мст — состояние покоя или установившегося движения,
3) М< Мст — состояние замедления.
Знак динамического момента определяется алгебраической разностью вращающего момента двигателя и момента статического сопротивления.
1.6. Определение времени разгона и торможения привода ткацкого станка
Электроприводом наз. совокупность электродвигателя и подвижных звеньев передаточных и исполнительных м-мов машины.

Выбор э/двигателя зависит от:
1.характера
полезной нагрузки (![]() -
ном. момент на валу э/двигателя)
-
ном. момент на валу э/двигателя)
2.характера
сил сопротивления(![]() -
приведенный момент сил сопротивления
всех подвижных звеньев и исполнит м-мов)
-
приведенный момент сил сопротивления
всех подвижных звеньев и исполнит м-мов)
3.инерционности
подвижных звеньев (![]() -
приведенный момент инерции всех звеньев)
-
приведенный момент инерции всех звеньев)
На
основе экспериментальных замеров
![]() и
соответствующих ему
и
соответствующих ему
![]() можно построить график механической
характеристики.
можно построить график механической
характеристики.
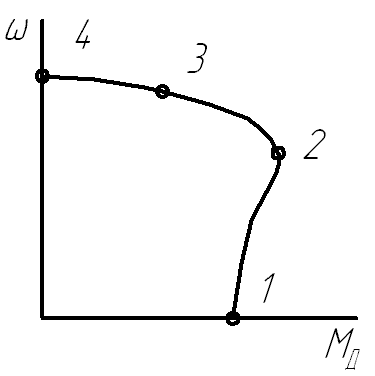
1.Пуск
(![]() ;0)
2.Критич режим(
;0)
2.Критич режим(![]() )
3. Номинальный (
)
3. Номинальный (![]() )
4.Холостого хода (
)
4.Холостого хода (![]() )
)
Привод с фрикционной муфтой:

Рассмотрим ведомую часть звено 4:
![]()
Звено
2:
![]() (
(![]() )
)
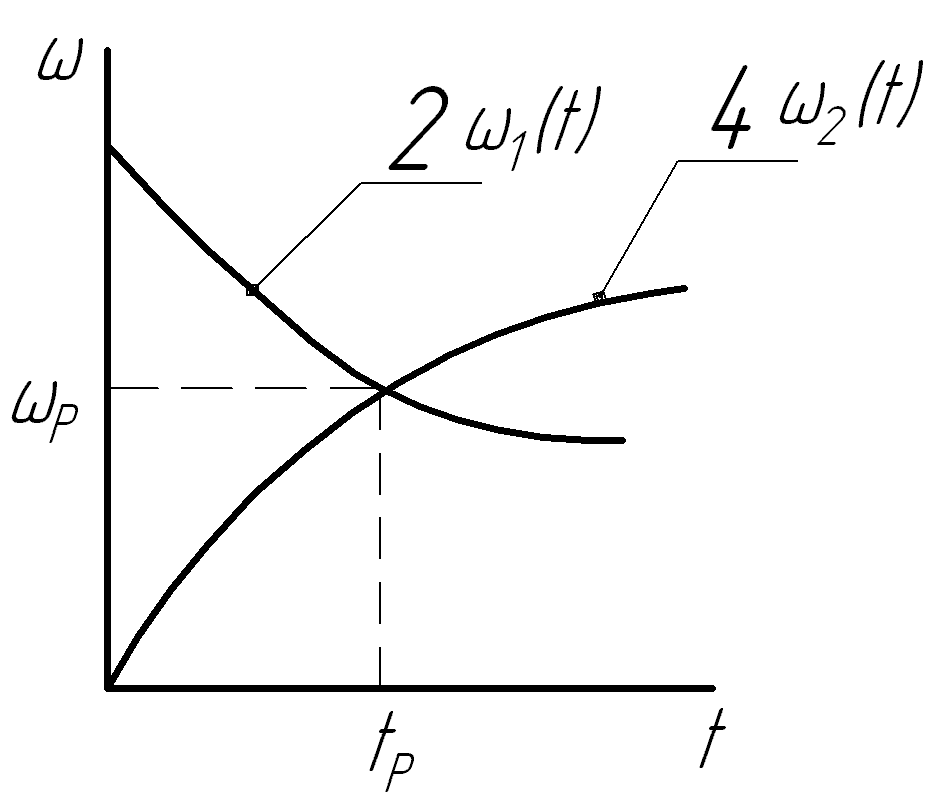
Решая
два уравнения системой найдем
![]() (
(![]() -
угловая скорость ведущей части привода,
-
угловая скорость ведущей части привода,
![]() -
угловая скорость ведомой части )
-
угловая скорость ведомой части )
Результат
решения уравнения в виде графика:![]() -время
разгона
-время
разгона
Сомкнуты
две полумуфты:
![]() ;
;
![]()
Уравнение движения ведомой части привода при торможении:
![]()
Результат
решения уравнения в виде графика:![]() -время
торможения
-время
торможения
