

1.Классификация электроприводов.
Классифицируются по следующим признакам: 1) по назначению: а) стационарный; б) мобильный ( и каждый на главный и вспомогательный); 2) по роду тока ( по числу фаз); 3) по способу подведения энергии к РМ: а) групповой (1 ЭД – много РМ); б) индивидуальный ( 1 ЭД и 1 РМ); в) многодвигательный ( много ЭД и 1 РМ); 4) по виду механического движения: ЭД вращательного, поступательного ( линейного), возвратно - поступательного, шаговые.5) по числу скоростей: 1-но, 2-ух,3-ех и много скоростные. 6) по роду передаточного устройства: безредукторный, редукторный с ременной, цепной и т.д. передачами. 7) по наличию маховика: с маховиком, без него. 8) по виду преобразователя эл.эн.: машинный, без машинный, вентильный, полупроводниковый, ионный.9) по степени управляемости: регулируемый, не регулируемый, позиционный, программно управляемый, следящий, адаптивный. 10) по уровню автоматизации: не автоматизированный, автоматизированный и автоматический.
2.Уравнение эп и его анализ.
Примером простейшего ЭП является система, состоящая из ЭД, жестко сочлененного с валом исполнительного механизма какой-то РМ. С позиции тер. мех. ротор ЭД жестко сочлененный с исп. мех. РМ, представляет собой абсолютно твердое тело, к которому приложен вращающий момент ЭД и тормозной момент сил сопротивления РМ. Тогда вращение этого твердого тела описывается известным уравнением Эйлера для динамики вращающегося движения абсолютно твердого тела.
![]()
где Мдин – динамический момент ЭП,
I=Iэд+Iрм
– момент инерции ЭП, Мэд(ω) – вращающий
момент ЭД, зависит от угловой скорости,
Мс.рм(ω) – момент сопротивления РМ,
![]() -
угловое ускорение.
-
угловое ускорение.
![]()
Анализ:
режим ускорения: Мэд >Мс при I=const ;

режим установившейся длительной работы: Мэд =Мс при I=const;
 ;ω=const
;ω=constрежим торможения Мэд <Мс при I=const;
3.Приведение моментов инерции рм и момента сил сопротивления рм к валу эд.
i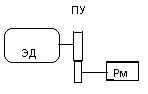 =
ωэд/ ωрм - передаточное
отношение
=
ωэд/ ωрм - передаточное
отношение
1. Моменты инерции РМ приводятся к валу ЭД из условия равенства кинетических энергий на валу РМ и на валу ЭД
а) для вращательного движения: Авал.эдрм= Авал.рмрм , Iвал.эдрм=Iвал.рмрм * 1/( ω2эд/ ω2рм)=Iвал.рм.рм/i2
б) для поступательного движения: Авал.эдрм= Авал.рмрм, Iвал.эд.* ω2эд/2=mрм*V2рм/2
Iвал.эдрм=mрм*V2рм./ ω2эд, Vрм= ωрм*r2, Vрм= ωэд*r1
2.Моменты сопротивления РМ приводятся к валу ЭД из условия равенства мощностей на валах РМ и ЭД
а) вращательного движения: Рвал.эдрм= Рвал.рмрм/ηпу => Мвал.эдрм* ωэд= (Мвал.рмрм * ωрм)/ ηпу= Мвал.рмрм/( ηпу*i).
б)для поступательного движения: Рвал.эдрм= Рвал.рмрм/ ηпу; Мвал.эдрм*ωэд= Fсопр.вал.рмрм* Vрм/ ηпу= Fвал.рмрм* Vрм/ (ηпу* ωэд)=> Vрм= ωрм*r2= ωэд* r1
4.Механические характеристики рм.
Она описывается след. эмпирической формулой:
Мс.рм (ω)=М0+(Мн.рм- М0)*( ω/ ωн.эд)α
где М0-идеальный начальный момент сопротивления РМ при ω=0;
ωн.эд-номинальная скороть ЭД;
ω-переменная угловая скорость ЭП;
α-показатель степени, определяющий вид РМ;
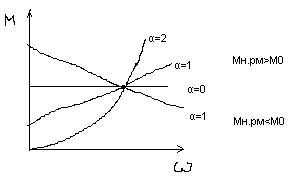
α=2 – осевые и центробежные вентиляторы и насосы
α=1 – металлорежущие станки Мн.рм>М0
α=0 – горизонтальные транспортеры и грузоподъемные механизмы
α=1 – вертикальные транспортеры сыпучих материалов Мн.рм<М0