

Анализ возможностей улучшения характеристик
комбинированных средств обнаружения
за счет совместной обработки непрерывных сигналов
Использование микропроцессорных устройств предоставляет возможность улучшения ТТХ КСО не только за счет усложнения алгоритмов обработки в отдельных СО, но и за счет усложнения общего алгоритма обработки сигналов в КСО.
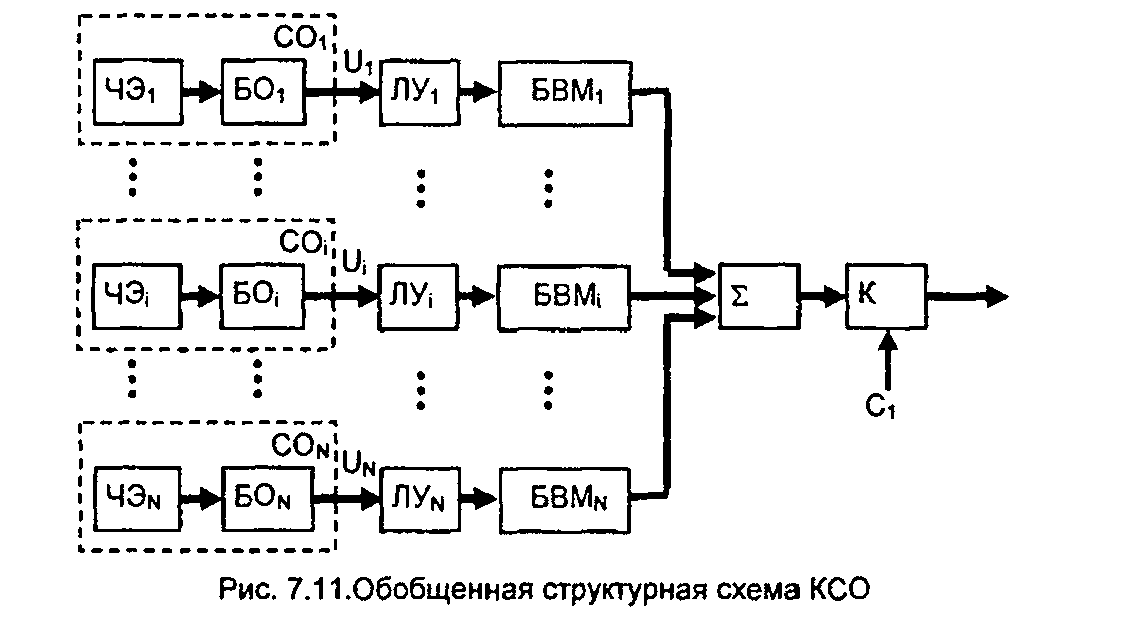
В наиболее общем виде процесс функционирования произвольного СО заключается (рис.7.8) в формировании на выходе чувствительного элемента (ЧЭ) электрического сигнала от производимых на него физических воздействий, последующей обработки этого сигнала с помощью электронного блока обработки (ВО) для выделения полезных (от нарушителя) и подавления помеховых сигналов. Сигнал U с выхода блока обработки поступает на вход дискриминатора Д, где при попадании этого сигнала в заданный интервал значений формируется сигнал тревоги СО. В простейшем случае дискриминатор является пороговым элементом, формирующим бинарный сигнал тревоги при превышении сигналом U заданного уровня. Очевидно, что сигнал U на выходе БО до дискриминатора, выносящего решение о наличии нарушителя, содержит в себе больше информации, чем сигнал на выходе Д. Таким образом, с точки зрения построения КСО определенная часть информации, выделяемой БО, теряется на этапе дискриминации для КСО, функционирующей на основе анализа только бинарных сигналов тревоги от отдельных СО.

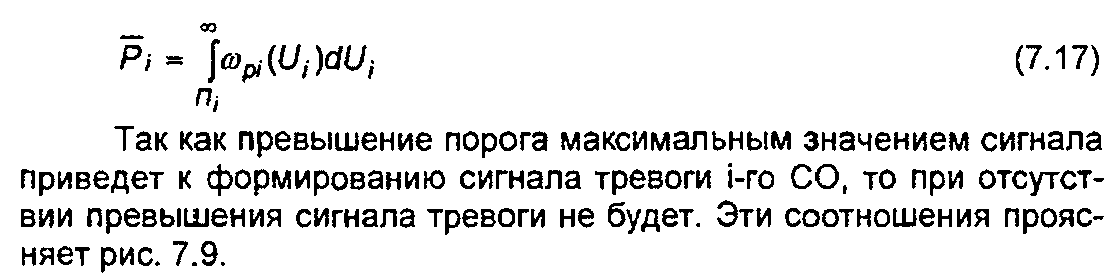
Вероятность ложной тревоги Р\ связана с возможностью превышения сигналом от помехового воздействия порога П|. Вероятность обнаружения Р* не равна единице в связи с возможностью того, что сигнал от нарушителя не достигнет порога П].
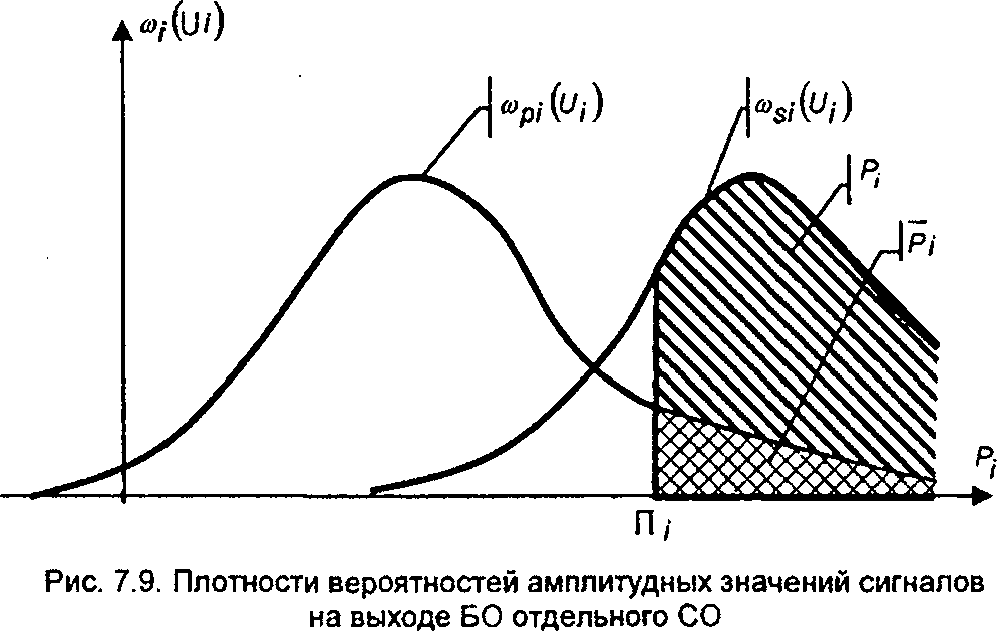
В случае двух СО (N=2), объединяемых в КСО по традиционной схеме логической обработки И, область принятия решения о наличии нарушителя можно изобразить в координатах (заштриховано на рис. 7.10).
В случае, когда сигналы Ui и U2 для обоих СО едва превзойдут соответствующие пороги ГЬ и ГЬ, будет сформирован общий сигнал тревоги (точка 1 на рис.7.10). В случае же, если один из сигналов (Ui) попал в область вероятного наличия нарушителя, а другой (U2) не дошел до порогового уровня (точка 2 на рис.7.10), общий сигнал тревоги сформирован не будет, хотя ясно, что наличие нарушителя во втором случае гораздо более вероятно. Таким образом, целесообразно введение определенных градаций по достоверности наличия нарушителя для каждого СО, сглаживающих границы принятия решения по сигналам 1^ и U2 для КСО.

а |
0.98 |
1.63 |
2.58 |
3.29 |
Р2И |
0,7 |
0.9 |
0.99 |
0.999 |
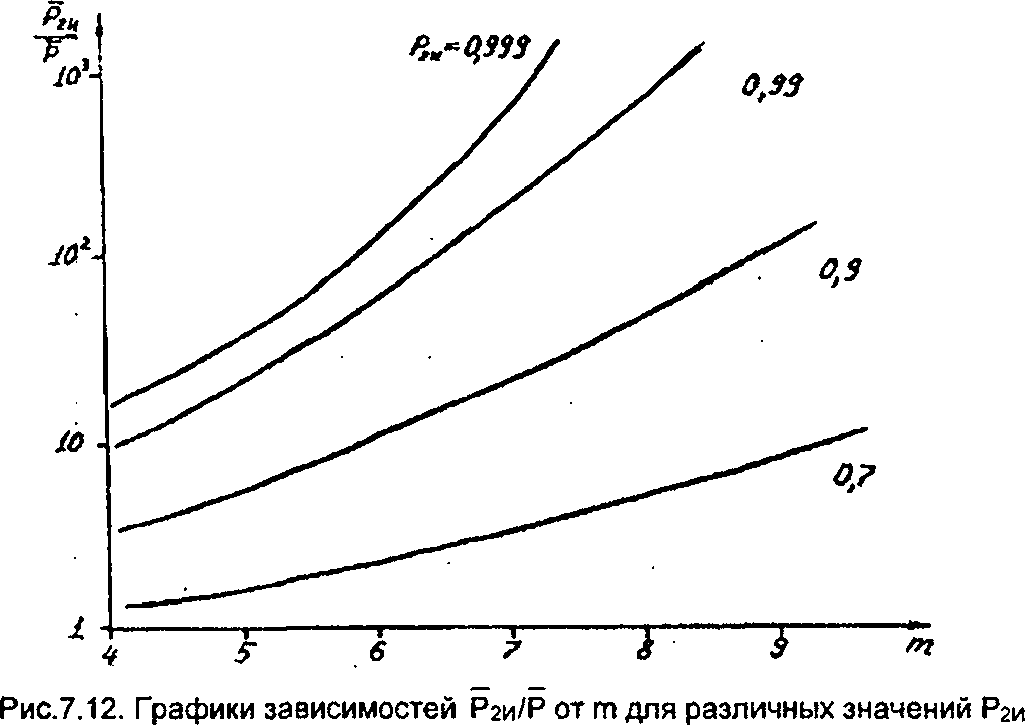
Исходя из изложенного, можно построить зависимости достигаемого выигрыша от отношения сигнал/шум на выходе отдельного СО для различных значений обеспечиваемой вероятности обнаружения Р2И (рис. 7.12).
Из графиков видно, что наибольший выигрыш от применения алгоритма КСО (7.23) по сравнению с традиционным при использовании одних и тех же СО достигается для больших значений отношений сигнал/шум отдельных СО и для высокой вероятности обнаружения КСО в целом.
ваемого значения вероятности обнаружения КСО. Таким образом, применение алгоритма КСО (7.23) позволяет добиться существенного улучшения помехоустойчивости КСО за счет рационального использования характеристик сигналов на выходе СО. При этом положительный эффект достигается даже для КСО, в состав которой входит только два СО. Дополнительные исследования показывают, что выигрыш того же порядка достигается и по сравнению со схемой логической обработки ИЛИ и возрастает при увеличении числа СО, входящих в состав КСО (N).
Линейный алгоритм построения КСО (7.23) был получен в предположении равенства дисперсий aSi=aPj для нормальных распределений (7.21). В связи с этим интересно сравнить в случае их несовпадения (aSi*aPi) точный алгоритм (7.22) с приближенным
(7.23), т.е. определить, можно ли пользоваться вместо точного алгоритма (7.22) более простым (7.23) и каковы будут при этом потери.
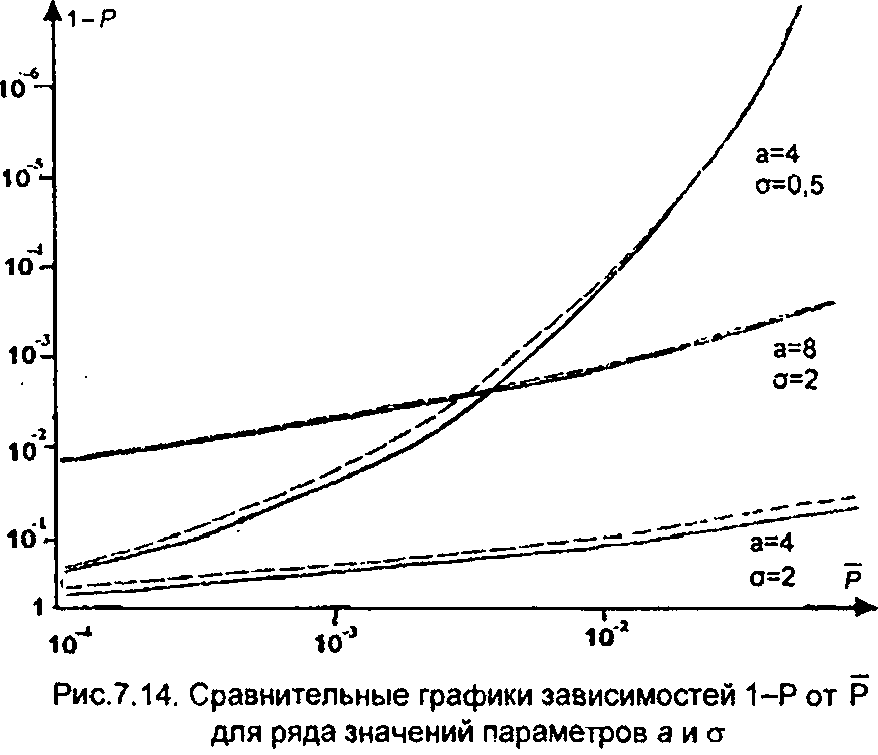
На рис. 7.14 приведены зависимости вероятности пропуска (1-Р) от
вероятности ложной тревоги Р для точного (7.22) алгоритма (штриховая линия) и линейного (7.23) алгоритма (сплошная) для ряда значений параметров а и а. Таким образом, есть основания предполагать, что при высоких отношениях сигнал/шум на выходе отдельных СО (более 5) основной вклад в выигрыш оптимального алгоритма по сравнению с традиционными схемами логической обработки вполне обеспечивается его заменой на линейный, хотя для конкретных практических приложений требуется дополнительная проверка и сравнение алгоритмов для конкретных зависимостей wsi(Ui) и wp,(Uj).
Алгоритм обработки (7.23) не меняется при одновременном увеличении или уменьшении всех коэффициентов усиления в одно и то же число раз (при соответствующем изменении также и значения порогового уровня СД То же самое относится к общему алгоритму (7.20).
Алгоритмы (7.20) и (7.23) дают возможность плавной регулировки вероятности обнаружения (путем изменения параметров С или Ci), автоматически обеспечивая при этом минимальную вероятность ложной тревоги (на имеющемся уровне информации).
