

4. Расчет статических и динамических характеристик для разомкнутой системы регулируемого электропривода
4.1 Расчет естественных характеристик ω=f(I), ω=f(М) системы регулируемого электропривода
В мостовой неуправляемой схеме возможны три режима (области) работы в зависимости от величины нагрузки Id и связанного с ней угла коммутации. Рост угла коммутации с ростом нагрузки, определяемый выражением [4.1], происходит только до значения γ=π/3, что ограничивает первую рабочую область трехфазной мостовой схемы. Дальнейший рост угла коммутации невозможен, т.к. это означало бы, что в работу одновременно вступают два вентиля одной фазы моста. Поэтому после достижения углом коммутации предельного значения γ=π/3 при дальнейшем возрастании тока точка естественного открывания вентилей смещается в сторону запаздывания, т.е. появляется некоторый угол естественного запаздывания ap≠0. Наличие естественного запаздывания открывания вентилей характеризует область II работы мостовой схемы, для которой справедливо соотношение [4.2]:
 [4.1]
[4.1]
 [4.2]
[4.2]
Увеличение угла
![]() при xd=∞
происходит до значения
=300;
далее начинается двойная коммутация
вентилей (рабочая область III).
При двойной коммутации ток проходит
через два вентиля одной фазы, минуя
обмотки ротора за счет энергии, накопленной
в индуктивностях цепи выпрямленного
тока. Работа электропривода в нормальных
условиях возможна лишь в пределах
рабочих областей I
и II.
при xd=∞
происходит до значения
=300;
далее начинается двойная коммутация
вентилей (рабочая область III).
При двойной коммутации ток проходит
через два вентиля одной фазы, минуя
обмотки ротора за счет энергии, накопленной
в индуктивностях цепи выпрямленного
тока. Работа электропривода в нормальных
условиях возможна лишь в пределах
рабочих областей I
и II.
Для определения момента, развиваемого асинхронным двигателем и рабочей области АВК, при различных углах управления, строим механическую характеристику.
Особенностью расчета механических характеристик АВК является то, что работа трехфазной мостовой схемы выпрямителя АВК связанна с переходом из первой рабочей области во вторую, и необходимо определить границу перехода.
Для построения механических характеристик необходимо рассчитать все необходимые коэффициенты:
4.1.1 Определяем идеальную и номинальную скорости:
![]() -
скорость идеального холостого хода;
-
скорость идеального холостого хода;
![]() -
номинальная скорость двигателя.
-
номинальная скорость двигателя.
4.1.2 Определяем коэффициенты:
![]() ;
;
где - коэффициент схемы преобразователя;
=4В- суммарное падение напряжение в вентилях роторной и трансформаторной групп ( при мостовой схеме соединения вентилей трансформаторной группы следует учитывать падение напряжения в 4 вентилях, причем для кремниевых принимается 1В).
![]()
где - коэффициент схемы инвертора.
![]()
где
![]() -
активное сопротивление фазы статора,
приведенное к ротору;
-
активное сопротивление фазы статора,
приведенное к ротору;
- индуктивное сопротивление ротора.
![]()
где
![]() и
и
![]() -
активное и реактивное сопротивления
фазы трансформатора, приведенные ко
вторичной обмотке;
-
активное и реактивное сопротивления
фазы трансформатора, приведенные ко
вторичной обмотке;
![]() -
активное сопротивление дросселя;
-
активное сопротивление дросселя;
![]() -
активное сопротивление ротора.
-
активное сопротивление ротора.
4.1.3 Определяем номинальное скольжение:
![]()
4.1.4 Определяем скольжение холостого хода для естественной характеристики:
![]()
4.1.5 Определяем действительное критическое скольжение:
![]()
4.1.6 Критический момент каскада:

4.1.7 Номинальный момент двигателя:
![]()
Момент переключения АВК:

Идеальный критический момент:

Действительный критический момент
![]() .
Это обусловлено тем, что перегрузочная
способность асинхронного двигателя в
каскадных схемах снижается на 17%
сравнительно с нормальной схемой
включения.
.
Это обусловлено тем, что перегрузочная
способность асинхронного двигателя в
каскадных схемах снижается на 17%
сравнительно с нормальной схемой
включения.
![]() ;
;
![]()
Т.е. при значениях момента до 0,75
идеального критического или 0,72
максимального момента асинхронного
двигателя схема действует в рабочей
области I.
При
![]() схема действует в рабочей области II.
Скольжение, соответствующее переходу
в эту область мостовой схемы, определяется
по выражению:
схема действует в рабочей области II.
Скольжение, соответствующее переходу
в эту область мостовой схемы, определяется
по выражению:
![]()
Определяем граничные углы управления мостовой схемы:
![]()
![]() ,
при s0=0;
,
при s0=0;
![]() ,
при s0=0,674;
,
при s0=0,674;
4.1.11 Статический момент на валу двигателя для вентиляторной нагрузки определяем по выражению:
![]()
где
![]()
Характеристика Мс=f(ω) рассчитывается вместе с механической характеристикой и строится в одних осях.
Для первой рабочей области момент определяется по выражению:
 [4.3]
[4.3]
Для второй рабочей области момент определяется по выражению:
 [4.4]
[4.4]
Введем обозначение:
![]()
С учетом данного обозначения выражения для моментов принимают вид:
 [4.5]
[4.5]
 [4.6]
[4.6]
Порядок расчета механической естественной характеристики (β=π/2) и искусственных характеристик для различных углов управления:
- вычисляем s0 и sпер;
- задаемся величиной скольжения s;
- вычисляем As и As2;
- если s<sпер вычисляем As-As2 и МI, затем скорость ω=ω0∙(1-s) и Мс;
- если s>sпер
вычисляем
![]() и МII, затем скорость
ω=ω0∙(1-s) и Мс.
и МII, затем скорость
ω=ω0∙(1-s) и Мс.
Результаты вычислений заносим в таблицу 3 и по данным таблицы строим естественную и искусственные механические характеристики.
Таблица 3
β |
s0 |
sпер |
s |
As |
As2 |
As-As2 |
As√1-4As2 |
MI,Нм |
MII,Нм |
ω,с-1 |
Мс,Нм |
90 |
0 |
0.205 |
0 |
0 |
0 |
0 |
-- |
0 |
-- |
62,8 |
2122 |
0,01 |
0,017 |
0,000296 |
0,017 |
-- |
378.7 |
-- |
62,172 |
2080 |
|||
0,0216 |
0,036 |
0,001316 |
0,035 |
-- |
783,105 |
-- |
61,47 |
2031 |
|||
0,05 |
0,079 |
0,0063 |
0,073 |
-- |
1636 |
-- |
59,66 |
1915 |
|||
0,1 |
0,145 |
0,021 |
0,124 |
-- |
2772 |
-- |
56,52 |
1719 |
|||
0,205 |
0,25 |
0,063 |
0,188 |
0,217 |
4200 |
4200 |
49,93 |
1340 |
|||
0,3 |
0,321 |
0,103 |
-- |
0,246 |
-- |
4773 |
43,96 |
1040 |
|||
0,3556 |
0,355 |
0,126 |
-- |
0,25 |
-- |
4850 |
40,468 |
881 |
|||
0,5 |
0,424 |
0,18 |
-- |
0,225 |
-- |
4357 |
31,4 |
530,45 |
|||
0,7 |
0,492 |
0,242 |
-- |
0,088 |
-- |
1709 |
18,84 |
190,96 |

Рисунок 12 Естественная механическая характеристика ω=f(М)
Расчет и построение естественной электромеханической характеристики ω=f(Id)
Электромеханическая характеристика определяется по выражению:
![]() [4.7]
[4.7]
Порядок расчета электромеханической естественной характеристики (β=π/2):
- вычисляем s0;
- задаемся величиной скольжения s;
- вычисляем Id ( формуле [4.7]);
- рассчитываем скорость ω.
Результаты вычислений заносим в таблицу 4, и по данным таблицы строим электромеханическую характеристику ω=f(Id) (рисунок 13).
Для определения границы перехода схемы в рабочую область II определяем значение тока переключения:

Таблица 4
-
β, град
S0
s
Id, А
ω, рад/с
900
0
0
0
62,8
0,01
48,107
62,172
0,0216
101,442
61,47
0,05
221,9
59,66
0,1
404,63
56,52
0,2
687,823
50,24
0,5
1186
31,4
0,8
1448
12,56
1,0
1563
0
![]()

Рисунок 13 Естественная электромеханическая характеристика ω=f(Id)
Построение электромеханической характеристики М=f(Id)
Отличие работы асинхронного двигателя в схеме вентильного каскада от работы при обычной схемы включения в том, что ток ротора одновременно проходит лишь по двум фазам ротора. Кроме того, как было сказано выше, для АВК характерны две рабочие области, где расчет производится неодинаково.
Для расчета электромеханической характеристики М=f(Id) для первой рабочей области используем выражение:
![]()
Для расчета электромеханической характеристики М=f(Id) для второй рабочей области используем выражение:
![]()
Для определения границы перехода схемы в рабочую область II определим значение тока переключения:
Задаемся различными значениями тока Id и определяем значения моментов первой и второй рабочих областей, данные заносим в таблицу 5. По данным таблицы 5 строим электромеханическую характеристику М=f(Id) (рисунок 14).
Таблица 5
-
Id, А
МI, Нм
МII, Нм
0
0
--
100
772
--
200
1486
--
500
3285
--
Id.пер=700А
4200
4200
Id.кр=990А
--
4850
1200
--
4269

Рисунок 14 Электромеханическая характеристика М=f(Id)
4.2 Расчет искусственных (регулировочных) характеристик ω=f(Id), ω=f(М) системы регулируемого электропривода для заданного диапазона регулирования D
Искусственные механические и электромеханические характеристики АВК рассчитываются аналогично естественным, но при определенном угле управления βi, который соответствует каждой регулировочной ( ступени регулирования скорости) и пусковой характеристики.
4.2.1 Момент переключения:
![]()
4.2.2 Пусковой момент:
![]()
Пусковая
характеристика рассчитывается при
введении в роторную цепь добавочного
сопротивления
![]() .
Если пуск происходит в две ступени, то
в момент переключения
.
Если пуск происходит в две ступени, то
в момент переключения
![]() вводим добавочное сопротивления для
второй пусковой ступени
вводим добавочное сопротивления для
второй пусковой ступени
![]() и
двигатель со второй пусковой ступени
переходит на регулировочную характеристику.
и
двигатель со второй пусковой ступени
переходит на регулировочную характеристику.
4.2.3 Угол управления для каждой регулировочной ступени определяется по следующей методике:
-
определяется скольжение для каждой
характеристики:
![]() ,
где
,
где
![]() -
скорость соответствующей ступени;
-
скорость соответствующей ступени;
-
определяем статический момент нагрузки
по выражению
![]() ;
;
-
определяем эквивалентное сопротивление
![]() ;
;
- определяем по известным моменту нагрузки и установившейся скорости выпрямленный ток ротора Idi:
![]() ;
;
где
![]() -
выпрямленное напряжение ротора;
-
выпрямленное напряжение ротора;
-Определяем
напряжение инвертора
![]() -
для регулировочных характеристик.
-
для регулировочных характеристик.
Для
пусковой учитывается введенное в
роторную цепь добавочное сопротивление
![]() ,
следовательно напряжение инвертора
определяется по выражению:
,
следовательно напряжение инвертора
определяется по выражению:
![]()
-
определяем угол управления:
![]() ;
;
где
![]() -
максимальное значение ЭДС инвертора,
при угле управления β=00.
-
максимальное значение ЭДС инвертора,
при угле управления β=00.
4.2.4 Пример расчета угла управления для регулировочной характеристики первой ступени:
-
скольжение на первой ступени:
![]()
-
определяем статический момент нагрузки
по выражению
![]() ,
где
,
где
![]() ;
;
- Определяем выпрямленный ток ротора:
![]()
Подставляя в это уравнение все известные величины находим:
![]()
Решая данное уравнение, определяем его корни: Id1=254.7А- ток ротора,
Id2=2535А- не удол. условию;
- Определяем напряжение инвертора:

- Определяем угол управления:
![]()
4.2.4 Пример расчета угла управления для регулировочной характеристики второй ступени:
-
скольжение на второй ступени:
![]()
-
определяем статический момент нагрузки
по выражению
![]() ,
где
,
где
![]() ;
;
- Определяем выпрямленный ток ротора:
![]()
Подставляя в это уравнение все известные величины находим:
![]()
Решая данное уравнение, определяем его корни: Id1=26,5А- ток ротора,
Id2=2763А- не удовл. условию;
- Определяем напряжение инвертора:

- Определяем угол управления:
![]()
4.2.5 Определение угла управления для пусковой характеристики (первая ступень):
Для определения угла управления для пусковой характеристики методика несколько иная, это обусловлено тем, что установившееся значение скорости для данной характеристики неизвестно.
Зная
пусковой момент Мп
каскада, а также добавочное сопротивление
для пусковой характеристики
![]() ,
по выражению [4.3] определяем скольжение
холостого хода s0,
затем угол управления β.
,
по выражению [4.3] определяем скольжение
холостого хода s0,
затем угол управления β.
Выражение для нахождения момента имеет вид ([4.3]):
 ;
;
где
 ,
где
,
где
![]()
При пуске скольжение равно s=1.
Подставляя в выражение значение скольжения s=1 и момента нагрузки, равного пусковому М=Мп, находим значение скольжения ХХ:
Для
этого введем обозначения:
![]() ,
следовательно
уравнение [4.3] примет вид:
,
следовательно
уравнение [4.3] примет вид:

Подставив численные значения выражение определения момента станет:
![]()
Корни уравнения Аs1=0,25 и Аs1=0,75;
Подставив каждое значение найденных корней уравнения в выражение , определяем удовлетворяющее условию s0>0, значение корня Аs.
При
Аs1=0,25
значение
![]()
При Аs2=0,75 значение s0=-1,54- данное выражение не удовлетворяет условию;
![]() -
выражение для определения скольжения
ХХ;
-
выражение для определения скольжения
ХХ;
Отсюда
определим угол управления
![]() .
.
4.2.6 Определения значения скорости на пусковой характеристике в момент переключения Мпер=2440Нм.
Определение скорости в момент переключения необходимо для определения необходимого числа пусковых ступеней для выхода двигателя на установившуюся скорость ( в данном случае, в установившуюся точку первой регулировочной ступени).
Для
определения скорости необходимо
определить скольжение, соответствующее
данной скорости sпер,
затем по выражению:
![]() ;
;
Находим скольжение:

Отсюда,
после нескольких вычислений ( аналогичных
в пункте 4.2.5 ) определим скольжение
![]() .
.
Определяем
скорость переключения
![]()
Если
производить пуск в одну ступень, то
переход с пусковой на регулировочную
характеристику, при данном значении
скорости переключения
![]() ,будет
неустойчивым. Для более качественного
и надежного пуска необходимо рассчитать
вторую ступень пусковых характеристик.
Введя добавочное сопротивление
,
двигатель начинает разгоняться и в
момент переключения Мпер
разовьет скорость
,
затем вводим второе добавочное
сопротивление
,будет
неустойчивым. Для более качественного
и надежного пуска необходимо рассчитать
вторую ступень пусковых характеристик.
Введя добавочное сопротивление
,
двигатель начинает разгоняться и в
момент переключения Мпер
разовьет скорость
,
затем вводим второе добавочное
сопротивление
![]() и двигатель начинает разгоняться по
характеристике второй пусковой ступени
и в момент переключения переходит на
первую регулировочную характеристику
и достигает установившегося режима
и двигатель начинает разгоняться по
характеристике второй пусковой ступени
и в момент переключения переходит на
первую регулировочную характеристику
и достигает установившегося режима
![]() .
.
4.2.7 Определение угла управления для пусковой характеристики (вторая ступень):
Зная пусковой момент Мп каскада, а также добавочное сопротивление для пусковой характеристики , по выражению [4.3] определяем скольжение холостого хода s0, затем угол управления β.
Выражение для нахождения момента имеет вид ([4.3]):
 ;
;
где
 ,
где
,
где
![]()
Подставляя в выражение значение скольжения sпер=0,57 и момента нагрузки, равного пусковому М=Мп, находим значение скольжения ХХ:
Для
этого введем обозначения:
![]() ,
следовательно
уравнение [4.3] примет вид:
,
следовательно
уравнение [4.3] примет вид:
Подставив численные значения выражение определения момента станет:
Корни уравнения Аs1=0,25 и Аs1=0,75;
Подставив каждое значение найденных корней уравнения в выражение , определяем удовлетворяющее условию s0>0, значение корня Аs.
ПриАs1=0,25
:![]()
При Аs2=0,75 значение s0=-0,8- данное выражение не удовлетворяет условию;
- выражение для определения скольжения ХХ;
Отсюда
определим угол управления
![]() .
.
4.2.8 Определения значения скорости на второй ступени пусковой характеристики в момент переключения Мпер=2440Нм.
Для
определения скорости необходимо
определить скольжение, соответствующее
данной скорости sпер,
затем по выражению:
![]() ;
;
Находим скольжение:

Отсюда,
после нескольких вычислений ( аналогичных
в пункте 4.2.5 ) определим скольжение
![]() .
.
Определяем
скорость переключения
![]()
4.2.8 Методика построения искусственных (регулировочных и пусковых) характеристик аналогична построению естественной механической и электромеханической характеристик и представлена в разделе 4.1.
Для каждой характеристики рассчитываем необходимые параметры и заносим их в таблицу 6: Таблица 6
Название искусственной характеристики |
Значение угла управления β, 0 |
Значение скольжения ХХ s0 |
Скольжение переключения sпер |
Критическое скольжение sкр |
ρ |
Первая рег-ая |
86,20 |
0,056 |
0,285 |
0,455 |
0,569 |
Вторая рег-ая |
38,10 |
0,675 |
1,176 |
1,54 |
0,569 |
Iст.пусковой хар-ки |
71,720 |
0,274 |
1 |
1,54 |
1,683 |
II ст. пусковой хар-ки |
82,750 |
0,115 |
0,5705 |
0,907 |
1,126 |
Механические искусственные характеристики рассчитываем и строим с помощью программы Mathcad, которые изображены на рисунке 15.
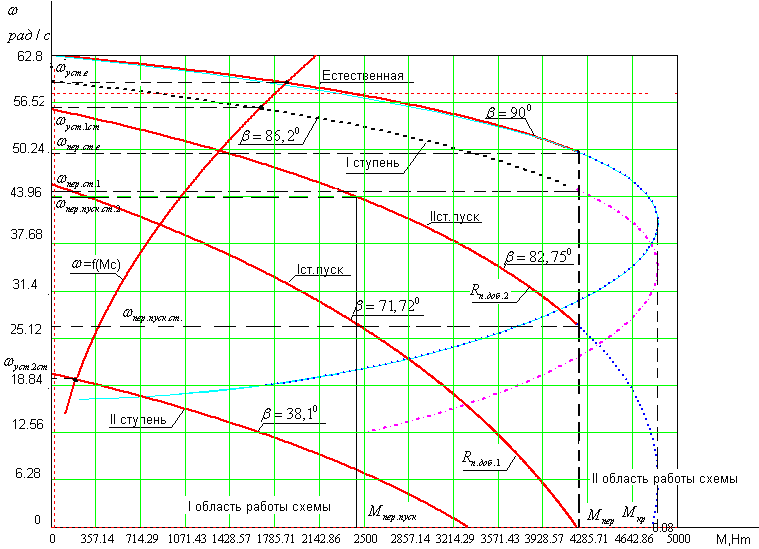
Рисунок 15 Искусственные механические характеристики ω=f(M)
4.2.9 Расчет и построение искусственных электромеханических характеристик ω=f(Id)
Электромеханическая характеристика определяется по выражению:
Для определения границы перехода схемы в рабочую область II определяем значение тока переключения:
Электромеханические искусственные характеристики ω=f(Id) для каждой регулировочной и пусковой ступени рассчитываются и строятся с учетом собственных значений: скольжения ХХ- s0; скольжения переключения sпер; критического скольжения sкр и значения коэффициента ρ, которые показаны выше (таблица 6).
Электромеханические искусственные характеристики рассчитываем и строим с помощью программы Mathcad, которые изображены на рисунке 16.

Рисунок 16 Искусственные электромеханические характеристики ω=f(Id)
4.3 Расчет механических переходных процессов за цикл работы ω=f(t) и Id=f(t)
В каскадных электроприводах наибольший интерес представляют переходные процессы в роторной цепи двигателя при изменении противо-ЭДС инвертора, когда электромагнитные процессы в статорной цепи уже закончились.
Каскадный привод является нелинейной системой с переменной структурой. При теоретическом исследовании таких ЭП принимают ряд допущений и ограничений.
При расчете статических характеристик двигательного режима при непрерывном токе АД заменяют эквивалентным генератором постоянного тока, и пользуются схемой замещения цепи выпрямленного напряжения при соединении обмоток двигателя и трансформатора инвертора в звезду.
Особенность
протекания переходных процессов в
схемах, содержащих управляемые и
неуправляемые вентили, направление
потока мощности однозначно и приводной
двигатель не может быть переведен в
генераторный режим. Следовательно, если
интенсивность изменения скорости
привода в сторону ее увеличения может
регулироваться путем воздействия на
СУ инвертором, то при необходимости
уменьшения скорости после снижения
выпрямленного тока ротора до нуля
привод становится неуправляемым и
характер переходного процесса определяется
только механической постоянной времени
и моментом нагрузки. Неуправляемый
режим работы каскада определяется
условием
![]() .
Таким образом, характер ПП в схеме АВК
для условий
и
.
Таким образом, характер ПП в схеме АВК
для условий
и
![]() неидентичный и определяется в первом
случае как электрическими, так и
механическими параметрами системы, а
во втором – только механическими.
неидентичный и определяется в первом
случае как электрическими, так и
механическими параметрами системы, а
во втором – только механическими.
В схеме АВК интенсивность протекания ПП определяется постоянной времени цепи выпрямленного тока, величина которой составляет не менее 0,1сек, следовательно использование в расчетах электромеханических ПП средних значений напряжения вентильного преобразователя, при любом характере ПП, возможно.
Некоторые особенности работы основной схемы вентильного каскада обусловлены также наличием в схеме замкнутого контура, образованного вентилями роторной и инверторной групп. Если во время переходного процесса угол регулирования β>900, что может произойти благодаря большому коэффициенту усиления замкнутой системы, то инвертор перейдет в выпрямительный режим. При этих условиях, в указанном контуре появится ток значительной величины, не заходящий в обмотки ротора, т.е. в схеме возникает аварийный режим.
4.3.1 Уравнение движения ЭП:
![]()
где
![]() -
динамический момент движения
электропривода;
-
динамический момент движения
электропривода;
![]() -
суммарный момент инерции привода;
-
суммарный момент инерции привода;
![]() -
скорость изменения привода во времени;
-
скорость изменения привода во времени;
Определим суммарный момент инерции:
![]()
где
![]() =(0,5-1,3)-
коэффициент, учитывающий момент инерции
редуктора;
=(0,5-1,3)-
коэффициент, учитывающий момент инерции
редуктора;
![]() -
момент инерции двигателя;
-
момент инерции двигателя;
![]() -
момент инерции исполнительного механизма;
-
момент инерции исполнительного механизма;
![]() -
передаточное число редуктора.
-
передаточное число редуктора.
Порядок расчета переходных процессов следующий:
-
Электромеханические характеристики,
изображенные на рисунке 16, разбиваем
на равные интервалы скорости
![]() и графически определяем соответствующие
значения скорости
и графически определяем соответствующие
значения скорости
![]() .
.
- По известным значениям скорости , определяем соответствующее значение выпрямленного тока ротора Idi, затем аналитически определяем значения момента Mi и момента сопротивления Mci по выражениям для расчета электромеханической характеристики М=f(Id), которые приведены в пункте 4.1.
Для
расчета выпрямленного тока используем
выражение [4.7] для расчета и построения
электромеханической характеристики
![]() ,
которая подробнее рассмотрена в пункте
4.1.
,
которая подробнее рассмотрена в пункте
4.1.
![]()
Значения скольжения ХХ s0i и коэффициента ρi приведены в таблице 6.
Для расчета электромеханической характеристики М=f(Id) для первой рабочей области используем выражение:
(1)
где =1,35- коэффициент схемы выпрямления;
Для расчета электромеханической характеристики М=f(Id) для второй рабочей области используем выражение:
(2)
Для определения границы перехода схемы в рабочую область II определим значение тока переключения:
Момент статической нагрузки рассчитывается по выражению:
![]()
Причем расчет пусковых ступеней немного отличен от вычисления регулировочных характеристик, это обусловлено наличием момента переключения Мпер.пуск и пускового момента Мп, практически равного значению момента переключения областей работы мостовой схемы выпрямления Мпер.
Т.к. нам известен
момент переключения пусковых ступеней,
то определяем значение тока переключения
пусковых характеристик
![]() по выражению (1):
по выражению (1):
![]()
Решив
квадратное уравнение определяем его
корни:
![]()
![]() -
не
удовлетворяет условию;
-
не
удовлетворяет условию;
-
Определяем средний динамический момент
на i-ом
участке:
![]()
где
![]() и
и
![]()
- Определяем время переходного процесса, которое требуется для достижения скорости на каждом участке:
![]()
- Полученные на отдельных участках интервалы времени суммируются для получения полного времени переходного процесса:
![]()
где n- число отдельных участков.
Результаты расчетов для каждой характеристики сводятся в таблицы 7-10, по данным которых строятся переходные процессы для рабочего цикла работы АВК (рисунок 17,18).
Таблица 7
Первая пусковая ступень (до значения ) |
||||
∆ωi, рад/с |
6,28 |
6,28 |
6,28 |
8,16 |
ωi, рад/с |
6,28 |
12,56 |
18,84 |
27 |
S |
0.9 |
0.8 |
0.7 |
0.57 |
Idi, А |
630 |
553 |
463 |
348 |
Мi.ср, Нм |
4052 |
3730 |
3320 |
2764 |
Мсi.ср, Нм |
10.6 |
53 |
150 |
292 |
Мдин.ср.i, Нм |
4041 |
3677 |
3170 |
2472 |
∆ti, с |
0.07 |
0.077 |
0.089 |
0.15 |
∆tiс накоплением, с |
-- |
0.147 |
0.236 |
0.386 |
t, с |
0.386 |
|||
Таблица 8
Вторая пусковая ступень (до значения ) |
||||
∆ωi, рад/с |
4,4 |
3,14 |
3,14 |
6,32 |
ωi, рад/с |
31,4 |
34,54 |
37,68 |
44 |
S |
0.5 |
0.45 |
0.4 |
0.3 |
Idi, А |
620 |
560 |
494 |
347 |
Мi.ср, Нм |
4030 |
3720 |
3420 |
2815 |
Мсi.ср, Нм |
460 |
586 |
688 |
903 |
Мдин.ср.i, Нм |
3570 |
3134 |
2732 |
1912 |
∆ti, с |
0.055 |
0.045 |
0.051 |
0.15 |
∆tiс накоплением, с |
-- |
0.1 |
0.151 |
0.3 |
t, с |
0.3 |
|||
Таблица 9
Первая регулировочная характеристика (до Iуст.1=254 А) |
||||
∆ωi, рад/с |
3,1 |
3,14 |
3,14 |
1,82 |
ωi, рад/с |
47,1 |
50,24 |
53,38 |
55,2 |
S |
0,25 |
0,2 |
0,15 |
0,121 |
Idi, А |
620 |
495 |
350 |
254 |
Мi.ср, Нм |
4030 |
3560 |
2850 |
2150 |
Мсi.ср, Нм |
1120 |
1275 |
1445 |
1590 |
Мдин.ср.i, Нм |
2910 |
2285 |
1405 |
560 |
∆ti, с |
0,048 |
0,0618 |
0,1 |
0,146 |
∆tiс накоплением, с |
-- |
0,1098 |
0,2098 |
0,3558 |
t, с |
0,3558 |
|||
Таблица 10
Вторая регулировочная характеристика (до Iуст.2=-26,5А), ТПВ с Iнач=-2160А (ω=55,2с-1) |
||||
∆ωi, рад/с |
55,2 |
3,14 |
6,28 |
10,08 |
ωi, рад/с |
0 |
3,14 |
9,42 |
19,5 |
S |
1 |
0,95 |
0,9 |
0,69 |
Idi, А |
-508 |
-445 |
-378 |
-26,5 |
Мi.ср, Нм |
17400 |
4460 |
3945 |
1820 |
Мсi.ср, Нм |
820 |
50 |
100 |
154 |
Мдин.ср.i, Нм |
16580 |
4410 |
3845 |
1665 |
∆ti, с |
0,15 |
0,032 |
0,0735 |
0,27 |
∆tiс накоплением, с |
-- |
0,182 |
0,255 |
0,0,525 |
t, с |
0,525 |
|||

Рисунок
17 График переходных процессов
![]()

Рисунок
18 График переходных процессов
![]()