

10. Приведенная ам.
Реальную машину анализировать сложно, поэтому ее упрощают и заменяют реальную машину на приведенную машину с неподвижным ротором.
S=1 , f1=f2
S ≠ 1, f2=Sf1.
E2=4,44f1W2kоб2kcФ
E2S=4,44f2W2kоб2kcФ=SE2
В общем случае индуктивность обмотки ротора и сопротивление обмотки ротора зависят от частоты. Если пренебречь эффектом вытеснения тока обмотки ротора, то можно принять L2=const, r2=const – машина с постоянными параметрами. Для того чтобы привести вращающуюся машину к машине с неподвижным ротором достаточно заменить r2 на r2/S, т.е. ввести в цепь ротора добавочное сопротивление равное: r2д=(1-S)r2/S. Та мех. мощность которую развивал двигатель при своем вращении превратилась в электрическую мощность на добавочном сопротивлении. r2д – эквивалент механической мощности на валу двигателя. Pмех=(1-S)r2m2I22/S.
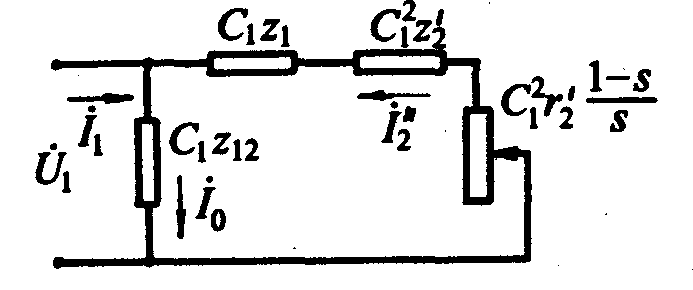
11. Схема замещения ам.
Уравнения статора асинхронной машины получаются при обходе первого контура, а ротора — второго контура в схеме замещения. Уравнения и схема замещения записываются для одной фазы машины.

Падение напряжения на сопротивлении взаимной индукции х12 определяет ЭДС Е1=Е2. Сопротивление обмотки статора z1 = r1+jx1, а сопротивление обмотки ротора z21=r21+jx21. Потери в сопротивлении r21(1-S)/S эквивалентны механической мощности на валу машины Р21.

В системе не учитываются потери в стали. Их можно приближенно учесть, представив асинхронную машину как двухобмоточную — без учета контуров вихревых токов и введя в намагничивающий контур активное сопротивление r12, учитывающее потери в стали. Если потери в стали машины известны, то активное сопротивление: r12=Pст/m1I0a2. I0a – активная составляющая тока холостого хода. Определив активное сопротивление, эквивалентное потерям в стали, можно ввести в рассмотрение процессов преобразования энергии в асинхронных машинах главное сопротивление или сопротивление взаимной индукции: z12 = r12+jx12. При приведении вращающейся машины к неподвижной ток в роторе остается неизменным. Таким образом, реальная асинхронная машина приводится к неподвижной за счет изменения активного сопротивления ротора до – r21/S. Токи, активные мощности и потери во вращающейся машине и неподвижной остаются неизменными. С увеличением мощности машин относительные значения активных сопротивлений уменьшаются, а индуктивных сопротивлений возрастают. Индуктивное сопротивление х12* зависят от соsφ машины. Чем ниже соsφ , т.е. чем больше реактивная мощность, потребляемая из сети, тем меньше х12*. Чем больше число полюсов в машине, тем меньше х12*. Сопротивление взаимной индукции x12* в основном определяется воздушным зазором. Более удобной схемой замещения АМ является Г образная схема замещения, в которой намагничивающий контур вынесен на вывод сети. В этой схеме замещения ток холостого хода не зависит от нагрузки и совпадает с действительным током I0 в Т-образной схеме замещения при идеальном холостом ходе, когда S=0. При холостом ходе в АД S близко к нулю, но не равно ему, так как двигатель из сети потребляет активную мощность, идущую на покрытие механических потерь и потерь в стали.
При идеальном холостом ходе электромагнитная мощность Рэм равна нулю, но двигатель потребляет из сети активную мощность, которая идет на покрытие потерь в стали. В этом режиме асинхронный двигатель устойчиво работать не может и должен вращаться другой машиной.
![]()
В двигателях общего назначения С1 мало отличается от единицы. С1 – это есть отношение напряжения U1 к ЭДС – Е1 при идеальном х.х.: С1=U1/-E1.