

11.Соединение звеньев. Последовательное соединение.
Последовательное соединение звеньев – соединение , когда выходной сигнал предыдущего звена явл-ся входным сигналом последнего звена.
![]()
W(p)=W1(p)*W2(p)*W3(p)
X3=X2W2=X1W1W2
W1-2=X3/X1=W1W2
A(ω)=∏Ai(ω)
A(ω)ejφ=∏Ai(ω) ejφ(ω) =
=∏Ai(ω) ej∑φ(ω)
П ри
последовательном соединение АЧХ всей
системы равняется произведению АЧХ
отдельных звеньев, а ФЧХ = сумме отдельных
звеньев
ри
последовательном соединение АЧХ всей
системы равняется произведению АЧХ
отдельных звеньев, а ФЧХ = сумме отдельных
звеньев
А(ω)=∏Аi(ω)
φ(ω)=∑φi(ω)
L=20lgA=20∑lgAi =∑Li
ЛАХ цепочки последовательных соединительных звеньев = сумме ЛАХ отдельных звеньев.
12.Соединение звеньев. Параллельное соединение.
Параллельное соединение – на вход всех звеньев поступает один и тот же сигнал, а выходной равен сумме всех сигналов звеньев от каждого звена.
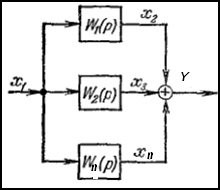
Y=∑Xi
W(p)=∑Wi(p)
W1-2=X5/X1=W1 +W2
Y=X2+X3=X1W1+ X1W2=X1(W1+W2)
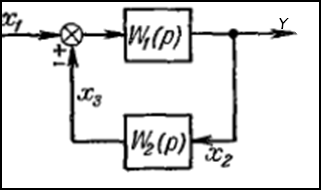
13.Соединение звеньев. Обратная связь.
Обратная связь – соединенная, когда сигнал с выхода первого звена через какое-то другое звено подается на вход, суммируясь с выходным сигналом. Если суммирует со знаком «+» связь положительная, с «-» отрицательный.
Δ=![]() X3
X3
X3=YW2
Y=ΔW1=W1(X![]() X3)=W1(X
YW2)
X3)=W1(X
YW2)
Y= W1(X YW2)
Y YW1W2=XW1
![]() =W1(p)/1
W1(p)W2(p)
=W1(p)/1
W1(p)W2(p)
14.Статика систем. Статическая ошибка.

![]() =0
=0
p=0

![]() =k
=k
p=0
Статическая ошибка.
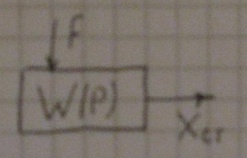
X CT=FWFX(p)
p=0
XCT=FWF-X(p)/1+W1(p)*W2(p) =
p=0
=F*(kF-X/1+k1k2)
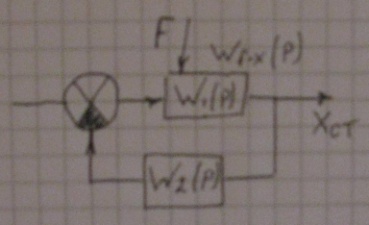
15.Способы устранения статической ошибки.
1)Ведение обратной связи
Ест= F*(kF-X/1+k1k2)
Увеличение k2 может привести к тому, что граница выйдет за границу устойчивости, что не допустимо.
Такой способ позволяет уменьшить kF, но не исключит её появление
2)Переход к статической опр-ия.
Включается статическое звено (интегрирующие). Вне участка возмущения - выходная величина.
Е ст
=FWF-X(p)/1+W1(p)*W2(p)=
ст
=FWF-X(p)/1+W1(p)*W2(p)=
=pWF-X(p)/p+W1*W2 =
p=0
=F*(0*kF-X/0+k1k2)=0
Включение интегрирующего звена на участке «возмущения – выходная величины» не позволяет устранить статическую ошибку.
3) Компенсирующее возмущение.
F*kfx+fkyyk0=0
Kyy=-(kfx/k0)