

23. Синтез дискр-х компенс-х регулят-в из условия, обеспеч-х минимизацию дисперсии вых-го сигнала лин-й системы.
Регуляторами с минимальной дисперсией будем называть регуляторы, расчет которых основан на минимизации дисперсии регулируемой переменной у(t):

Ввиду того что в этот критерий не входит (со своим весом) управляемая переменная u(t), во многих случаях наблюдались весьма значительные изменения сигнала на входе регулятора. Поэтому и было предложено дополнить критерий взвешенным значением управляемой переменной и минимизировать величину

Шум n(k) обычно описывают как непараметрическими моделями (например, переходной характеристикой формирующего фильтра), так и параметрическими. Введение управляющего воздействия не позволяет получить минимум дисперсии регулируемой переменной; вместо нее минимизируется взвешенная сумма дисперсий регулируемой и управляемой переменных. Регуляторы, оптимизированные по такому критерию, будем именовать регуляторами с минимальной обобщенной дисперсией.
Ниже излагается методика расчета регуляторов с минимальной обобщенной дисперсией для объектов с запаздыванием и без него. Обычные рег-ры с мин-й дисперсией м.б. получены как частный случай при r=0. Для описания формирующих фильтров исп-ся параметрические модели, которые наиболее удобны при синтезе адаптивных алгоритмов управления, основанных на идентификации параметров.
Рег-ры с миним-й обобщенной дисперсией для объектов без запаздывания
Допустим, что объект управления имеет передаточную функцию
 (5.153)
(5.153)
формирующий фильтр шума –
 (5.154)
(5.154)
Предполагается, что v(k) – это некоррелированный случайный сигнал, причем
 (5.155)
(5.155)
Структурная схема рассматриваемой системы упр-я представлена на рис. 5.5.
Будем считать, что задающее воздействие w(k) = 0, при этом
e(k) = – y(k). Требуется построить регулятор, обеспечивающий минимум критерия
 (5.156)
(5.156)
Этот регулятор должен вырабатывать такую последовательность входных воздействий u(k), которая минимизирует ошибку вида (5.156), вызванную случайным возмущением {v(k)}. Отметим, что
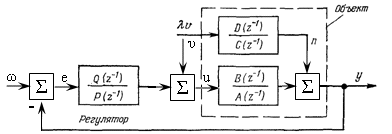
Рис. 5.5. Регулятор с минимальной обобщенной дисперсией в системе управления с объектом без запаздывания
в критерии качества I используют величину y(k + l), а не y(k), поскольку в исходной модели b0 = 0 (т.е. прямая передача отсутствует), в силу чего управляющее воздействие u(k) не оказывает влияния на величину регулируемой переменной y(k). Ввиду этого необходимо выразить y(k + l) в функции ранее наблюдавшихся значений y(k), y(k – 1), …; u(k), u(k – 1), … . Согласно уравнениям (5.153) и (5.154), предсказанное значение y(k + l) можно получить из выражений:
 (5.157)
(5.157)
 .
(5.158)
.
(5.158)
Последнее перепишем в развернутой форме:
 (5.159)
(5.159)
Выполнив умножение и возвратившись во временную область, имеем
 (5.160)
(5.160)
Подставим полученное соотношение в критерий (5.156):
 (5.161)
(5.161)
В м-нт времени k все в-ны, вх-щие в (5.161), известны, за искл-м u(k) и v(k + l). Поэтому, беря матем-е ожид-е последней, учтем, что она не зав-т от ост-х перем-х:
 (5.162)
(5.162)
Оптимальное значение управляющей переменной и(k) определим из условия
 (5.163)
(5.163)
Преобр-ем множитель при b1 в ур-нии (5.163), восп-вавшись соотн-м (5.160):
 (5.164)
(5.164)
Подставив выражение (5.157) в (5.164)
 ,
,
получим окончательный результат в виде передаточной функции регулятора с минимальной обобщенной дисперсией (далее он сокращенно именуется РМД1):
 (5.165)
(5.165)
Как следует из (5.165), в описание этого регулятора входят элементы модели объекта управления (полиномы A(z–1) и В(z–1)) и модели случайного возмущения (полиномы c(z–1) и D(z–1)). При r = 0 (5.165) дает упрощенный вариант регулятора с минимальной дисперсией (сокращенное обозначение – РМД2):
 (5.166)
(5.166)
В случае C(z-1) = A(z-1) передат-я ф-ция р-ра, обознач-го РМД3, приобр-т вид
 (5.167)
(5.167)
При r = 0 (5.167) переходит в передаточную функцию регулятора РМД4:
 (5.168)
(5.168)
Синтезир-е регуляторы существенно отличаются по своим характеристикам.
Рег-ры с мин-ной обобщенной дисперсией для объектов с запаздыванием
ОУ может опис-ся передат-й функцией, учитывающей наличие запаздывания:
 (5.169)
(5.169)
С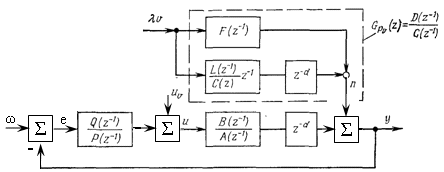 тр-ра
системы упр-ния с объектом такого типа
изображена на рис. 5.7. В систему вкл-н
фильтр, форм-ющий
тр-ра
системы упр-ния с объектом такого типа
изображена на рис. 5.7. В систему вкл-н
фильтр, форм-ющий
Рис. 5.7. Рег-р с мин-ой дисперсией в сист. упр-я с объектом, содерж-м запазд-е
в соотв-и с уравнением (5.154) случайное возмущение n(k) из белого шума v(k) с характеристиками (5.155). Поскольку управляющая переменная u(k), подаваемая на вход объекта с запаздыванием d, оказывает воздействие на значения регулируемой переменной, начиная лишь с y(k + d + l), используем в данном случае критерий
 .
(5.170)
.
(5.170)
Согласно (5.157), предсказ-е знач-е y(k + d + l) можно опред-ть из соотношения
 (5.171)
(5.171)
В момент времени k, для которого рассчитывается управление u (k), значения случайного шума v(k + 1), …, v(k + d+ 1) еще неизвестны. Учитывая это, разделим выражение, описывающее формирующий фильтр в (5.171), на две части:
 (5.172)
(5.172)
На рис. 5.7 формирующий фильтр также представлен в виде двух составляющих: F(z-1), описывающей ту часть последовательности значений n(k), которые не могут быть подавлены за счет u(k), и
z-(d+1)L(z-1)/C(z-1), соответствующей тем значениям n(k) в y(k), на которые u(k) воздействует. Введенные в (5.172) полиномы имеют вид
 ,
(5.173)
,
(5.173)
 .
(5.174)
.
(5.174)
Их пар-ры можно
опр-ть путем непоср-го сравн-я коэф-нтов
при одинак-х степенях z
в ур-нии.
 (5.175)
(5.175)
Регуляторы с минимальной дисперсией без статического смещения
Для того чтобы
постоянные внешние возмущения или
ступенчатые изменения задающей переменной
не приводили к появлению постоянных
смещений регулируемой переменной,
передаточная функция регулятора должна
удовлетворять условию:
 (5.182)
(5.182)
Поскольку это усл-е не выполн-ся для синтезированных рег-ров с минимальной дисперсией, в их структуру должны быть внесены некоторые изменения.
а) Введение дополнительного интегрирующего члена
В простейшем случае для устранения статических смещений достаточно включить в передаточную функцию регулятора с минимальной дисперсией полюс в точке z = l. Более гибким методом является введение в регулятор
 (5.183)
(5.183)
звена пропорционально-интегрирующего типа, описываемого перед-ной функцией
 (5.184)
(5.184)
Это равносильно добавлению разностного уравнения
 (5.185)
(5.185)
Варьируя коэффициент , можно получать регуляторы с различными свойствами:
= 0: u(k) = u'(k) – регулятор П–типа;
= 1: u(k) – u(k – l) = u'(k)–рег-тор ПИ–типа с равными весами И– и П–звеньев.
Если
0, условие

выполняется для регуляторов РМД1 и РМД2 при D(1) С(1), а для РМДЗ и РМД4 – при D(1) A(1). В тех случаях, когда указанные соотношения между полиномами не соблюдаются, можно изменять их, вводя дополнительные полюса при z = l:
в РМД2 C'(z) = (z – l)C(z);
в РМДЗ и РМД4 A'(z) = (z – l)A(z).
Данный способ не дает желаемого эффекта лишь для регулятора РМД1.
Влючение в рег-р звеньев интегрирующего типа позволяет избавиться от статического смещения. В то же время это приводит к возрастанию дисперсии переменной y(k), особенно в случае высокочаст-ного возмущения v(k). Надлежащим выбором α можно добиться оптимального соотношения между этими явлениями.
Ранее синтез регуляторов с минимальной дисперсией проводился в предположении, что задающий сигнал отсутствует, т.е. w(k) = 0, ввиду чего y(k) = – e(k). Используя расширенный критерий качества
 ,
(5.186)
,
(5.186)
можно минимизировать дисперсию регулируемой переменной в рабочей точке [w(k); uw(k)], соответствующей ненулевому задающему сигналу. Здесь величина
 (5.187)
(5.187)
равна такому значению u(k), при котором отсутствует статическое смещение, т.е. y(k) = w(k). Выполнив преобразования, получим уравнение модифицированного регулятора с минимальной дисперсией:
 (5.188)
(5.188)
Данный регулятор обеспечивает устранение смещений, возникающих в результате изменения задающей переменной w(k). Другой подход к построению регуляторов с аналогичными свойствами, основанный на оценивании параметров замкнутого контура управления.
б) Рег-торы с мин-й дисперсией для объектов типа чистого запаздывания
Полученные выше рег-торы с миним-й дисперсией обладают оптим-й стр-рой по отнош-ю к объектам вида (z~1)z-d/A (z",1) и формирующим фильтрам шума D(r1)/С (z1). При их выводе предполагалось, что объект описывается разностным ур-нием, в котором учтено наличие запазд-ия. В этом случае в системах с рег-рами РМД2-з и РМДЗ-з регулируемая переменная предст-ет собой процесс со скользящим средним порядка d, причем его дисперсия резко возрастает с ув-нием d.
Здесь мы рассмотрим регуляторы с минимальной дисперсией применительно к объектам, которые описываются моделями типа чистого запаздывания:
 .
(5.189)
.
(5.189)
Воспользовавшись предыдущими рез-ами, получим след-е ур-ния регуляторов:
Для формирующего
фильтра шума вида
 .
.
 ,
(5.190)
,
(5.190)
 ,
(5.191)
,
(5.191)
где, согласно (5.173)
 (5.192)
(5.192)
В соответствии с (5.175) полиномы, входящие в формулы (5.190) и (5.191), связаны соотношением
 .
(5.193)
.
(5.193)
Следовательно, передаточные функции регуляторов отличаются от нуля только в тех случаях, когда полином С(z1) имеет порядок m l и/или D(z1) – порядок m d.
Для формирующего фильтра шума вида WOv(z1) = D(z1); C(z1) = A(z1) = l.
 ;
(5.194)
;
(5.194)
 .
(5.195)
.
(5.195)
Согласно уравнению (5.175), в данном случае L(z1) = 0 (т.е. регулятор нереализуем), если у полинома D(z1) порядок m < d – 1. Это еще раз подтверждает принцип, лежащий в основе синтеза регуляторов с минимальной дисперсией. Он состоит в получении оценки регулируемой переменной y(k – f – d + 1) по известным значениям u(k – 1), u(k – 2), ... и v(k – 1), v(k – 2), .... Предсказанная оценка используется далее для вычисления управляющего сигнала u(k). В соответствии с уравнением (5.172) значения регулируемой переменной и элементов последовательности случайного шума связаны соотношением
 (5.196)
(5.196)
Очевидно, данная величина при m d – 1 не поддается оценке, ввиду чего регулирование невозможно. Если m = d – 1, то
 .
(5.197)
.
(5.197)
В этом случае D(z1) = F(z1), т.е. возмущающий сигнал содержит только те составляющие, на которые не воздействует управление u(k). Следовательно, регулятор с минимальной дисперсией при m = d – 1 не оказывает никакого влияния на функционирование замкнутого контура управления. Только при m d регулятор этого типа позволяет уменьшить дисперсию y(k) по сравнению с той, которая наблюдается на выходе разомкнутого контура.
Т.о., если модель ОУ п/с чистое запазд-е, рег-ры с миним-й дисперсией способны повысить кач-во упр-ния лишь в том случае, когда возмущение n(k), действующее на y(k), является авторегрес-ным процессом со скользящим средним (окрашенным шумом) или процессом со скользящим средним порядка m d.