

11)Построение пп для линейных дискретных систем
12)Критерии кач-ва регулирования
Показатели кач-ва сис-мы б. прямые и косвенные
Прямые опред-ся на основе графика переходной хар-ки.
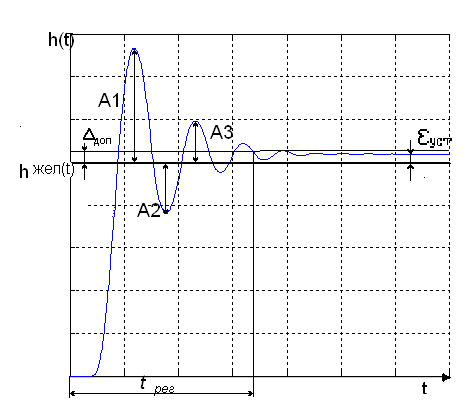
εуст - установившаяся ошибка.
∆доп–доверительный интервал ошибки: если допустимый интервал не задан, то по умолчанию мы принимаем его 5% от hжел.
Быстродействие- время, в течение которого переходная хар-ка войдёт в доверительный интервал и уже не выйдет, это время и есть время регулирования tрег.
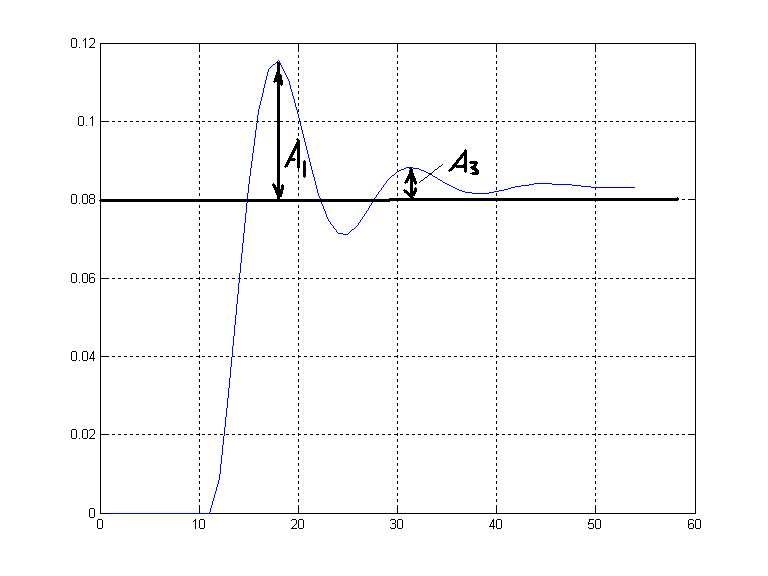
Перерегулирование – максимальное значение вых-го параметра, амплитуда hmax. Если перейти к безразмерным единицам, то перерегулирование будет характеризоваться следующим фактором:
 *100%
*100%
Степень затухания- данный показатель получаем сопоставляя амплитуды переходной характеристики следующим образом:
 .
.
Колебательность сис-мы хар-ся числом колебаний регулируемой величины за время переходного процесса tрег(tп). Если за это вр. ПП в сис-ме совершает число колебаний меньше заданного по усл-м технологии, тот считается, что с-ма им-т треб-е кач-во регул-я в части ее колебательности.
Установившаяся ошибка εуст опред-ся как разность м/ду установившимся значением регулируемой вел-ны после окончания ПП и ее заданным значением: εуст=hжел-hуст.
Косвенные критерии качества регулирования
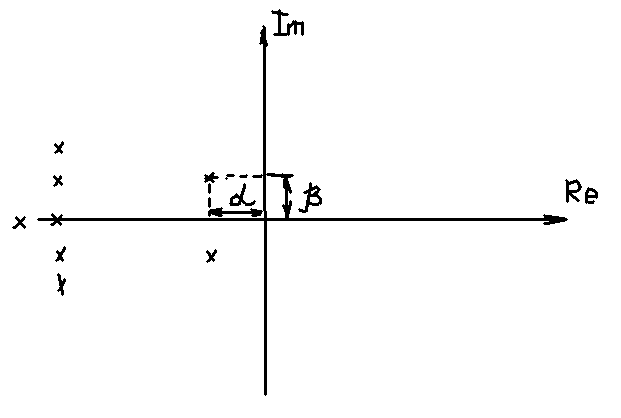
1) Переходной процесс существенно зависит от корней характеристического уравнения. Для оценки качества регулирования используется понятие “средний геометрический корень”- Ω.
 ,где
p1..pn
–
корни характеристического уравнения,
а
,где
p1..pn
–
корни характеристического уравнения,
а
 - соответствующие коэффициенты ДУ.
- соответствующие коэффициенты ДУ.
Из ур-я следует, что для повышения быстродей-я сис-мы следует увеличивать коэф-т an . Чем больше величина Ω , тем у системы большее быстродействие. Если допустить что корни вещественные и отрицательны, то корень, кот. в координатах Im(Re) будет ближе к мнимой оси, будет затягивать переходной процесс.
Если ближайший корень к мнимой оси будет следующим:
 ,
,
тогда переходной процесс будет затягиваться этой парой корней и решение будет зависеть от p1,2. Перейдём к след. Виду


 ψ
–
степень затухания.
ψ
–
степень затухания.
Оценка
кач-ва по показателю колебательности(зн-е
ординаты Mmax амплитудной хар-ки зам-й
сис-мы при нач-ой ординате равной 1)
В результате получили уравнение окружности с радиусом R и с центром в точке (C,0): R=M/1-M2; C=M2/1-M2
13)Синтез сис-мы регулирования методом расчета параметров регулятора на желаемую степень затухания пп
Синтез-сп-б выбора стр-ры сис-мы и нах-е значений параметров настройки.
Имеем переходную характеристику:
Степень
затухания ПП:
 .
.
Пусть есть одно условие – жел.. Другое – пусть структура регулятора (т.е. закон регулирования) известна.
Пусть есть корни:
= 1- е-2/
/ - колебательность
/=m
= 1- е-2m
Колебательность /=m, m=0,221…0,3 при жел=0,75…0,9.
Предположим, что наша система невысокого порядка. Синтезируем П-регулятор:

Пусть
ось, где находятся корни, совпадает с
мнимой осью, т.е. Re=0,
т.е. система находится на границе
устойчивости. По критерию Найквиста: .
(АФЧХ пойдет через(-1;j0)).
Сместим Im
к желаемому корню, тогда:
.
(АФЧХ пойдет через(-1;j0)).
Сместим Im
к желаемому корню, тогда:
 (1)
(1)
[если регулятор более общий:
 (2)]
надо найти коэффициент пропорциональности,
чтобы он удовлетворял (1).
(2)]
надо найти коэффициент пропорциональности,
чтобы он удовлетворял (1).