

1.Скорость и ускорение материальной точки.
Ускоре́ние (обычно
обозначается ![]() ,
в теоретической
механике
,
в теоретической
механике ![]() ) —
производная скорости по
времени, векторная величина,
показывающая, на сколько изменяется
вектор скорости точки
(тела) при её (его) движении за единицу
времени (то есть ускорение учитывает
не только изменение величины скорости,
но и её направления).
) —
производная скорости по
времени, векторная величина,
показывающая, на сколько изменяется
вектор скорости точки
(тела) при её (его) движении за единицу
времени (то есть ускорение учитывает
не только изменение величины скорости,
но и её направления).
Например, вблизи Земли падающее на Землю тело, в случае, когда можно пренебречь сопротивлением воздуха, увеличивает свою скорость примерно на 9,8 м/с каждую секунду, то есть его ускорение примерно равно 9,8 м/с².
Единицей ускорения в Международной системе единиц (СИ) служит метр в секунду за секунду (m/s2, м/с2), существует также внесистемная единица гал(gal), применяемая в гравиметрии и равная 1 см/с2.
Производная ускорения по времени, то есть величина, характеризующая скорость изменения ускорения, называется рывок:
![]() где
где ![]() —
вектор рывка.
—
вектор рывка.
В релятивистской механике обобщением классического ускорения является 4-ускорение.
Ускорение точки при прямолинейном движении
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении справедливы формулы:
![]()
![]()
Из вышеприведённых двух формул можно вывести ещё одну, связывающую скалярные величины:
![]()
Здесь ![]() —
начальная скорость тела,
—
начальная скорость тела, ![]() —
конечная скорость тела,
—
конечная скорость тела, ![]() —
ускорение тела,
—
ускорение тела, ![]() —
пройденный телом путь.
—
пройденный телом путь.
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным). Обратное, вообще говоря, неверно.
Ускорение точки при движении по окружности
Вектор ускорения
![]()
при движении точки по окружности можно разложить на два слагаемых (компоненты):
![]()
Тангенциальное
ускорение — ![]() направлено
по касательной к траектории (обозначается
иногда
направлено
по касательной к траектории (обозначается
иногда ![]() и т. д.,
в зависимости от того, какой буквой в
данной книге принято обозначать
ускорение). Является составляющей
вектора ускорения
.
Характеризует изменение скорости по
модулю.
и т. д.,
в зависимости от того, какой буквой в
данной книге принято обозначать
ускорение). Является составляющей
вектора ускорения
.
Характеризует изменение скорости по
модулю.
![]()
Центростремительное или нормальное ускорение ![]() —
возникает (не равно нулю) всегда при
движении точки по траектории с ненулевой
кривизной (также обозначается
иногда
и т. д.).
Является составляющей вектора ускорения
,
перпендикулярной вектору мгновенной
скорости. Характеризует изменение
скорости по направлению. Вектор
нормального ускорения всегда направлен
к мгновенной оси вращения, а модуль
равен:
—
возникает (не равно нулю) всегда при
движении точки по траектории с ненулевой
кривизной (также обозначается
иногда
и т. д.).
Является составляющей вектора ускорения
,
перпендикулярной вектору мгновенной
скорости. Характеризует изменение
скорости по направлению. Вектор
нормального ускорения всегда направлен
к мгновенной оси вращения, а модуль
равен:
![]()
Кроме этих двух компонент, используется также понятие угловое ускорение, показывающее, на сколько изменилась угловая скорость за единицу времени, и, аналогично линейному ускорению, вычисляемое следующим образом:
![]()
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены (или хотя бы их скалярное произведение положительно), значение скорости растёт, и наоборот.
Ускорение точки при движении по кривой
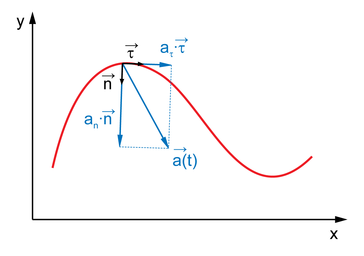
![]()
Разложение ускорения по сопутствующему базису для движения в плоскости
Вектор
ускорения
можно
разложить по сопутствующему
базису ![]()
![]()
где
— величина скорости,
 —
единичный
касательный к траектории вектор,
направленный вдоль скорости
(касательный орт),
—
единичный
касательный к траектории вектор,
направленный вдоль скорости
(касательный орт), —
орт главной
нормали к траектории, который
можно определить как единичный вектор
в направлении
—
орт главной
нормали к траектории, который
можно определить как единичный вектор
в направлении 
 —
орт бинормали к
траектории,
—
орт бинормали к
траектории, — радиус
кривизны траектории.
— радиус
кривизны траектории.
![]() ,
называемое бинормальным ускорением,
всегда равно нулю. Это можно считать
прямым следствием определения векторов
,
называемое бинормальным ускорением,
всегда равно нулю. Это можно считать
прямым следствием определения векторов ![]() :
можно сказать, что они выбираются именно
так, чтобы первый всегда совпадал с
нормальным ускорением, второй же
ортогонально первому.
:
можно сказать, что они выбираются именно
так, чтобы первый всегда совпадал с
нормальным ускорением, второй же
ортогонально первому.
Векторы ![]() и
и ![]() называются
касательным (тангенциальным)
и нормальным
ускорениями соответственно.
называются
касательным (тангенциальным)
и нормальным
ускорениями соответственно.
Итак, учитывая сказанное выше, вектор ускорения всегда можно записать как:
![]()
Ско́рость (часто
обозначается ![]() ,
от англ. velocity или фр. vitesse) — векторная физическая величина,
характеризующая быстроту перемещения и
направление движения материальной
точки в
пространстве относительно выбранной системы
отсчёта.
Этим же словом может называться скалярная величина,
точнее модуль производной радиус-вектора.
,
от англ. velocity или фр. vitesse) — векторная физическая величина,
характеризующая быстроту перемещения и
направление движения материальной
точки в
пространстве относительно выбранной системы
отсчёта.
Этим же словом может называться скалярная величина,
точнее модуль производной радиус-вектора.
В науке используется также скорость в широком смысле, как быстрота изменения какой-либо величины (не обязательно радиус-вектора) в зависимости от другой (чаще изменения во времени, но также в пространстве или любой другой). Так, например, говорят об угловой скорости, скорости изменения температуры, скорости химической реакции, групповой скорости, скорости соединения и т. д. Математически характеризуется производной функции.
Обобщениями понятия скорости является четырёхмерная скорость, или скорость в релятивистской механики, и обобщённая скорость, или скорость вобобщённых координатах.
Вектор
скорости материальной
точки в
каждый момент времени определяется
производной по времени радиус-вектора ![]() этой
точки[1]:
этой
точки[1]:
![]()
Здесь — модуль скорости, — направленный вдоль скорости единичный вектор касательной к траектории в точке .
Импульс,
или количество движения, — это мера
механического движения тела, которая
определяется как произведение массы тела
на его скорость ![]() .
Импульс является векторной величиной,
его направление совпадает с направлением
скорости. Для замкнутой системы
выполняется закон
сохранения импульса.
Обобщением импулься в релятивистских
системах является четырёхимпульс,
временная компонента которого равна
.
Импульс является векторной величиной,
его направление совпадает с направлением
скорости. Для замкнутой системы
выполняется закон
сохранения импульса.
Обобщением импулься в релятивистских
системах является четырёхимпульс,
временная компонента которого равна ![]() .
.
2Равнопеременное (равноускоренное) движение. Основные уравнения
равнопеременного движения. Графики V(t), x(t), a(t).
Равномерное прямолинейное движение – это частный случай неравномерного движения.
Неравномерное движение – это движение, при котором тело (материальная точка) за равные промежутки времени совершает неодинаковые перемещения. Например, городской автобус движется неравномерно, так как его движение состоит в основном из разгонов и торможений.
Равнопеременное движение – это движение, при котором скорость тела (материальной точки) за любые равные промежутки времени изменяется одинаково.
Ускорение тела при равнопеременном движении остаётся постоянным по модулю и по направлению (a = const).
Равнопеременное движение может быть равноускоренным или равнозамедленным.
Равноускоренное движение – это движение тела (материальной точки) с положительным ускорением, то есть при таком движении тело разгоняется с неизменным ускорением. В случае равноускоренного движения модуль скорости тела с течением времени возрастает, направление ускорения совпадает с направлением скорости движения.
Равнозамедленное движение – это движение тела (материальной точки) с отрицательным ускорением, то есть при таком движении тело равномерно замедляется. При равнозамедленном движении векторы скорости и ускорения противоположны, а модуль скорости с течением времени уменьшается.В механике любое прямолинейное движение является ускоренным, поэтому замедленное движение отличается от ускоренного лишь знаком проекции вектора ускорения на выбранную ось системы координат.
Средняя скорость переменного движения определяется путём деления перемещения тела на время, в течение которого это перемещение было совершено. Единица измерения средней скорости – м/с.
vcp = s / t
Мгновенная скорость – это скорость тела (материальной точки) в данный момент времени или в данной точке траектории, то есть предел, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt:
![]() Вектор
мгновенной скорости равнопеременного
движения можно найти как первую
производную от вектора перемещения по
времени:
Вектор
мгновенной скорости равнопеременного
движения можно найти как первую
производную от вектора перемещения по
времени:
![]() =
= ![]() '
'
Проекция вектора скорости на ось ОХ:
vx = x’
это производная от координаты по времени (аналогично получают проекции вектора скорости на другие координатные оси).
Ускорение – это величина, которая определяет быстроту изменения скорости тела, то есть предел, к которому стремится изменение скорости при бесконечном уменьшении промежутка времени Δt:
![]() Вектор
ускорения равнопеременного движения можно
найти как первую производную от вектора
скорости по времени или как вторую
производную от вектора перемещения по
времени:
Вектор
ускорения равнопеременного движения можно
найти как первую производную от вектора
скорости по времени или как вторую
производную от вектора перемещения по
времени:
= ' = "
Равнопеременное движение — движение с постоянным ускорением.
G=9.8
м/с2
Уравнения
равнопеременного движения:
 .
Пример
равнопеременного движения — свободное
падение
.
Пример
равнопеременного движения — свободное
падение
3. Угловая скорость и угловое
ускорение. Период и частота. Связь угловой скорости с линейной скоростью
Углова́я ско́рость — векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
![]() ,
,
а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
Производная угловой скорости по времени есть угловое ускорение.
Углово́е ускоре́ние — псевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
При вращении тела вокруг неподвижной оси, угловое ускорение по модулю равно[1]:
Вектор углового
ускорения ![]() направлен
вдоль оси вращения (в сторону
направлен
вдоль оси вращения (в сторону ![]() при
ускоренном вращении и противоположно
—
при замедленном).
при
ускоренном вращении и противоположно
—
при замедленном).
При
вращении вокруг неподвижной точки
вектор углового ускорения определяется
как первая производная от вектора
угловой скорости ![]() по
времени, то есть
по
времени, то есть
![]() ,
,
и направлен по касательной к годографу вектора в соответствующей его точке.
Чaстота́ — физическая
величина, характеристика периодического
процесса, равная числу полных циклов
процесса, совершённых за единицу времени.
Стандартные обозначения в
формулах — ![]() ,
, ![]() ,
, ![]() или
или ![]() .
Единицей частоты в Международной
системе единиц (СИ) в
общем случае является герц (Гц, Hz).
Величина, обратная частоте,
называется периодом.
Частота, как и время,
является одной из наиболее точно
измеряемых физических величин: до
относительной точности 10−17[1].
Период колеба́ний —
наименьший промежуток времени,
за который осциллятор совершает
одно полное колебание (то
есть возвращается в то же состояние[1],
в котором он находился в первоначальный
момент, выбранный произвольно).
.
Единицей частоты в Международной
системе единиц (СИ) в
общем случае является герц (Гц, Hz).
Величина, обратная частоте,
называется периодом.
Частота, как и время,
является одной из наиболее точно
измеряемых физических величин: до
относительной точности 10−17[1].
Период колеба́ний —
наименьший промежуток времени,
за который осциллятор совершает
одно полное колебание (то
есть возвращается в то же состояние[1],
в котором он находился в первоначальный
момент, выбранный произвольно).
В принципе совпадает с математическим понятием периода функции, но имея ввиду под функцией зависимость физической величины, совершающей колебания, от времени.
Это понятие в таком виде применимо как к гармоническим, так и к ангармоническим строго периодическими колебаниям (а приближенно - с тем или иным успехом - и непериодическим колебаниям, по крайней мере к близким к периодичности).
Обозначения: обычное
стандартное обозначение периода
колебаний: ![]() (хотя
могут применяться и другие, наиболее
часто это
(хотя
могут применяться и другие, наиболее
часто это ![]() ,
иногда
,
иногда ![]() и
т. д.).
и
т. д.).
Единицы измерения: секунда
Период колебаний связан соотношением взаимной обратности с частотой:
![]()
Для
волновых процессов период связан кроме
того очевидным образом с длиной
волны ![]()
![]()
где - скорость распространения волны (точнее[2] - фазовая скорость).
Связь между линейной и угловой скоростью. Скорость точки, движущейся по окружности, часто называют линейной скоростью, чтобы подчеркнуть ее отличие от угловой скорости. При вращении твердого тела разные его точки имеют разные линейные скорости, но угловая скорость для всех точек одинакова. Между линейной скоростью какой-либо точки вращающегося тела и угловой скорость существует связь.Точка, лежащая на окружности радиуса R, за один оборот пройдет путь 2πR. А так как, время одного оборота тела есть период Т, то модуль линейной скорости можно найти так: v=2πR/T=2πRν или v=ωR. Отсюда видно, что , чем дальше расположена точка тела от оси вращения, тем больше ее линейная скорость. Модуль ускорения точки, движущейся равномерно по окружности, можно выразить через угловую скорость тела и радиус окружности: a=v2/R, но v=ωR. Следовательно, a=ω2R. Чем дальше расположена точка твердого тела от оси вращения, тем больше по модулю ускорение он имеет.
4 Инерциальные системы отсчета. Законы Ньютона
Первый закон Ньютона
Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальная точка при отсутствии внешних воздействий сохраняет величину и направление своей скорости неограниченно долго.
Второй закон Ньютона
В инерциальной системе отсчёта ускорение, которое получает материальная точка, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе
Третий закон Ньютона
Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению:
![]()
Инерциа́льная систе́ма отсчёта (ИСО) — система отсчёта, в которой справедлив первый закон Ньютона (закон инерции): все свободные тела (то есть такие, на которые не действуют внешние силы или действие этих сил компенсируется) движутся прямолинейно и равномерно или покоятся[1]. Эквивалентной является следующая формулировка, удобная для использования в теоретической механике[2]:
Инерциальной называется система отсчёта, по отношению к которой пространство является однородным и изотропным, а время — однородным.
5 Закон всемирного тяготения.
ЗАКОН ВСЕМИРНОГО ТЯГОТЕНИЯ.
Открыт Ньютоном в 1667 году на основе анализа движения планет (з-ны Кеплера) и, в частности, Луны. В этом же направлении работали Р.Гук (оспаривал приоритет) и Р.Боскович.
Все тела взаимодействуют друг с другом с силой, прямо пропорциональной произведению масс этих тел и обратно пропорциональной квадрату расстояния между ними.
Класси́ческая
тео́рия тяготе́ния Ньюто́на (Зако́н
всео́бщего тяготе́ния Ньюто́на) —
закон, описывающий гравитационное
взаимодействие в рамках классической
механики. Этот закон был открыт Ньютоном в
1666 году. Он гласит, что сила гравитационного
притяжения между двумя материальными
точками массы ![]() и
и ![]() ,
разделёнными расстоянием
,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:
,
разделёнными расстоянием
,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:
![]()
Здесь ![]() — гравитационная
постоянная, равная
— гравитационная
постоянная, равная ![]() м³/(кг
с²).
м³/(кг
с²).
6 Импульс тела. Закон сохранения импульса.
Импульс (Количество движения) — векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этой точки на её скорость v, направление импульса совпадает с направлением вектора скорости:
Закон сохранения импульса утверждает, что сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.., при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
находят применение при создании современной ракетно-космической техники. Движение с помощью реактивной струи по закону сохранения импульса лежит в основе гидрореактивного двигателя. В основе движения многих морских моллюсков (осьминогов, медуз, кальмаров, каракатиц) также лежит реактивный принцип
Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
7 Работа силы.
Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы.
8.Кинетическая энергия.
Кинети́ческая эне́ргия — энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательного движения.
Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением.