

1.1.2 Понятие регулирования
Регулирование – изменение во времени физической величины по требуемому закону в установившемся режиме, который наступает после окончания переходного процесса, связанного с введением в работу объекта управления (ОУ). Но также надо иметь в виду, что обеспечение постоянства физической величины рассматривается как частный случай изменения.
В систему регулирования не входит ПР. Регулирование – это частный случай управления, когда целью является изменение этой величины по заданному закону.
Теория регулирования (ОР, РУ и т.п.).
11.09.2012
Требуемый закон – это функция времени yтр(t). Например, регулируемая величина – угловая скорость вала двигателя видеомагнитофона Ω. Например, требуется Ωтр = 100 рад/c = const; частота съёмки киносъёмочной камеры νтр(t) = ν0 +at (для замедления движения); какое-то устройство надо проверить на механическую тряску, перемещение по вертикальной платформы Sтр(t) = Smax*cos(2*pi*fплатформы*t). Ещё бывает, чтобы какая-нибудь величина изменялась в зависимости не от времени, а, например, от диаметра рулона.
Установившийся режим:
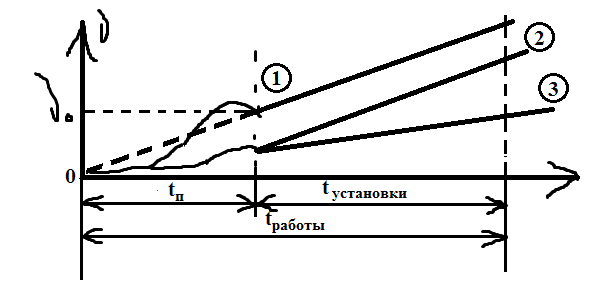
Из определения регулирования вытекает, что САР должна быть в первую очередь очень точной. Точность работы САР обычно оценивают по установившейся ошибке регулирования x1(t) – разности между требуемым значением регулируемой величины и текущим значением в установившемся режиме:
![]() (sic!)
(sic!)
Из рисунка 1: 1: xу(t) = 0; 2: xу(t) = const; 3: xу(t) ≠ const.
Установившаяся ошибка – это основной показатель качества работы САР. Она количественно характеризует это качество. Указывается в паспортных данных (обычно).
Из определения вытекает, что требуемый закон должен быть задан. В задачу системы регулирования эта задача не входит, программатора нет в составе системы. На практике этот закон yтр(t) уже закладывается при проектировании. Это программа регулирования. Если их несколько, то оператор (человек) должен эту программу выбрать.
Изобразим структурную схему САР.
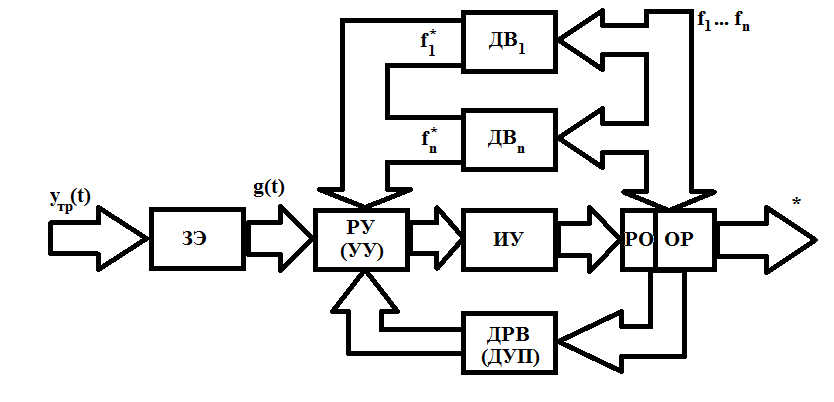
ЗЭ – задающий элемент, проектируется.
РУ – регулирующее устройство.
ИУ – исполнительное устройство.
РО – регулируемый орган.
ОР – объект регулирования.
ДРВ – датчик регулируемой величины.
18.09.2012
Для системы САР рассматривают ещё дополнительные показатели качества, которые характеризуют её работу в установившемся режиме, который наступает после включения системы. К ним относятся:
- время переходного процесса tп;
- перерегулирование σ.
Для нахождения численных значений этих критериев на вход системы (т.е. на выходе задающего элемента) формируется ступенчатое воздействие (какое-то число, умноженное на единичную ступенчатую функцию). Изобразим график:

Теоретически время переходного процесса равно бесконечности.
Пусть поведение рассматриваемой системы изменяется по следующему закону:
![]() (2)
(2)
![]()
![]()
![]()
Практически за время переходного процесса принимают время от начала переходного процесса до момента, когда отклонение y(t)-yуст по модулю меньше Δ.
Перерегулирование σ – это относительное превышение максимальным значением регулируемой величины ymax установившегося значения yу.
![]()
Для хороших САР требуется, чтобы регулирование находилось в диапазоне от 10% до 30%.