54. Выбор мощности эд режима s3
Реальный
график повторно кратковременного
режима, может отклонятся от номинального,
числом вкл в цикле, нагрузкой ЭД на
различных этапах работы в цикле, а также
относительной продолжительностью вкл
(ПВ)
![]() .
В качестве расчетной принимается либо
среднее значение мощности либо средне
квадратичное
.
В качестве расчетной принимается либо
среднее значение мощности либо средне
квадратичное
![]() ,
,![]()
При этом ЭД следует выбрать из тех ЭД, номинальная ПВ которых наиболее близка к реальной.
Если
реальная ПВ совпадает с номинальной,
то проверка по нагреву сводится к
соотношению полученных эквивалентных
величин, соответствующими номинальными
данными ЭД. Обычно![]() .
Равенство средних потерь для номинального
и реального режима.
.
Равенство средних потерь для номинального
и реального режима.
 ,
где
,
где![]()
При
пренебрежении постоянными потерями![]() при
.
при
.![]() ,
,![]()
При![]() происходит
снижение перегрузочной способности и
требуется проверка ЭД
происходит
снижение перегрузочной способности и
требуется проверка ЭД
55. Определение допустимой частоты вкл к.З ад
Допустимом числом вкл в час считают такое, при котором среднее превышение t0 после большого числа рабочих циклов в режиме S5 будет равно допустимому, и двигатель оказывается полностью использован по нагреву.
При малых t цикла в повторно кратковременных режимах возрастает доля пусковых и тормозных потерь, суммарных потерь W за цикл. В ЭП некоторых механизмов возникает необходимость по условиям тех-ки в частоте вкл АД 600-800 и более в час.
Потери
W
в АД за цикл состоят из потерь W
при пус –![]() и
тор –
и
тор –![]() ,
а также –
,
а также –![]() –
установившегося режим.
–
установившегося режим.
Пусть
при номинальной скор мощность отводимая
в окр.ср есть![]() ,
тогда в период паузы
,
тогда в период паузы
![]() .
В ПП пус и тор
.
В ПП пус и тор
![]() .
.
Баланс W за цикл
![]() (1)
(1)
Представим пар-ры цикла
![]()
![]()
![]()
![]()
подставим в (1) эти значения поучим
 (2)
(2)
Для
АД с к.з ротором вычитаемое в знаменателе
можно пренебречь т.к оно не превышает
![]() ,
то
,
то
![]() (3)
(3)
Если
в установившегося режиме АД работает
с номинальной нагрузкой
![]() ,
(3) упрощается
,
(3) упрощается
![]() (4)
(4)
Из
(3) видно, что число вкл в час зависит от
статической нагрузки определяемой![]() ,
относительной продолжительности вкл
,
относительной продолжительности вкл![]() ,
коэффициента ухудшения теплоотдачи
,
коэффициента ухудшения теплоотдачи![]() и
от потерь в ПП. С уменьшением
возрастает
h
. Достигает наибольшего значения при
х.х На h
существенно влияет потери W
в ПП т.к они пропорциональны
и
от потерь в ПП. С уменьшением
возрастает
h
. Достигает наибольшего значения при
х.х На h
существенно влияет потери W
в ПП т.к они пропорциональны
![]() .
.
Из
(3) следует![]() ,
то h
не зависит от
.
,
то h
не зависит от
.
при
![]() ,
с ростом
,
h
увеличивается
,
с ростом
,
h
увеличивается
при
![]() ,
с ростом
,
h
уменьшается
,
с ростом
,
h
уменьшается
Для номинальной нагрузки в установившегося режиме с ростом знаменателя h уменьшается.
Увеличение h достигается:
- независимой вентиляцией АД: -уменьшение потерь W в ПП.
Частотное управление АД обеспечивает min потери в ПП. Исследование показали, что min потерь W в ПП имеет место при I=(1.5-2)Iн и оптимальном абсолютном скольжении. При частотном управлении АД h оказывается в несколько раз выше чем при прямом пуске АД от сети и торможение противо-включением. Существенный эффект повышения h достигается путем отказа от эл тор и замена его мех-им.
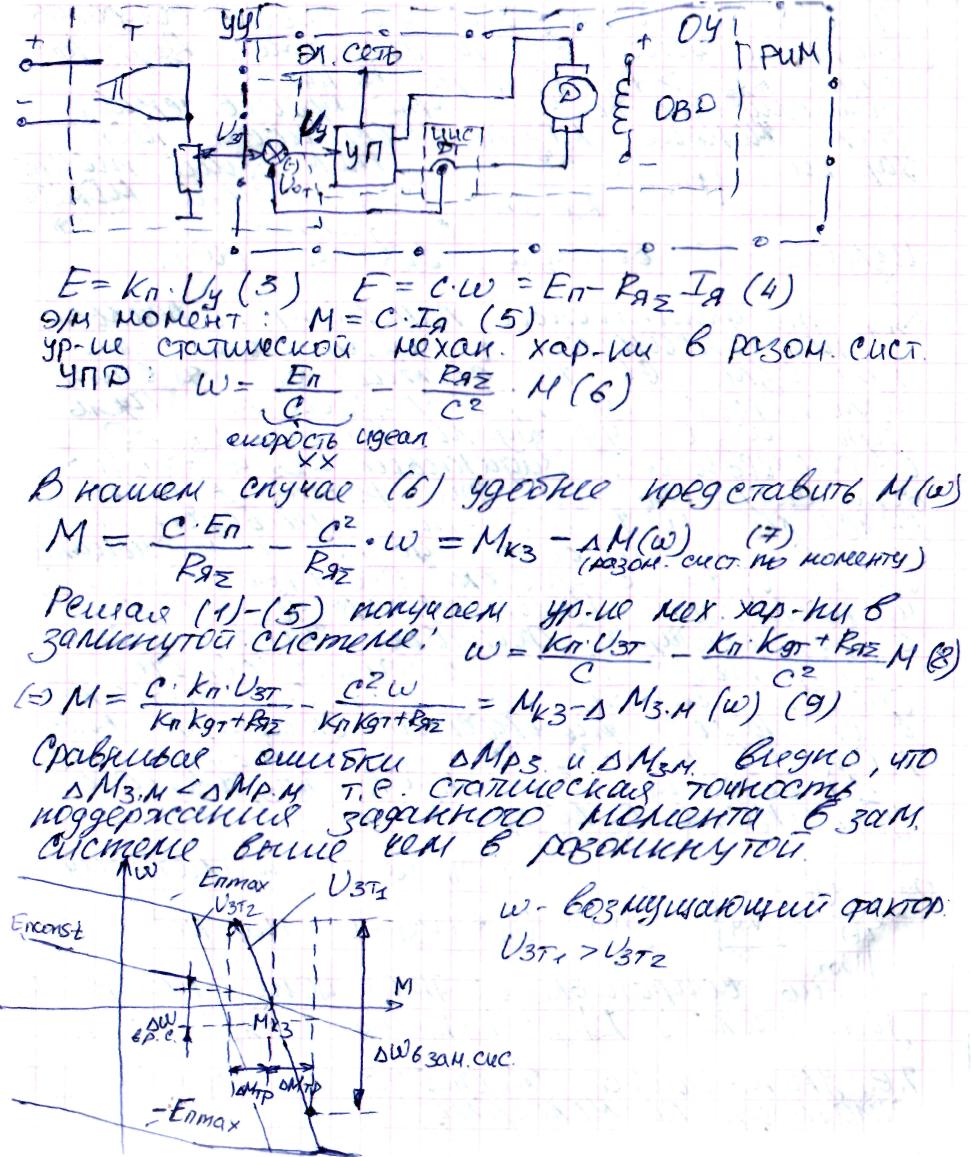
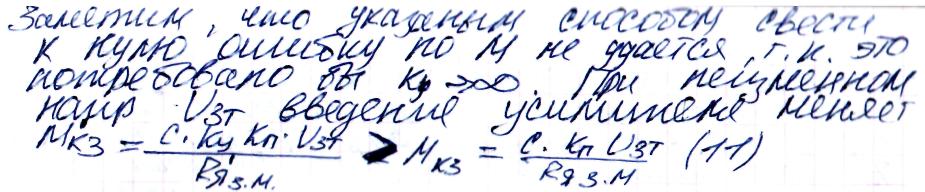
56. Принцип непосредственного управления регулируемой координатой на примере системы УП-Д с отрицательной обратной связью по току якоря. Электрическая схема, математическое описание, механические характеристики.
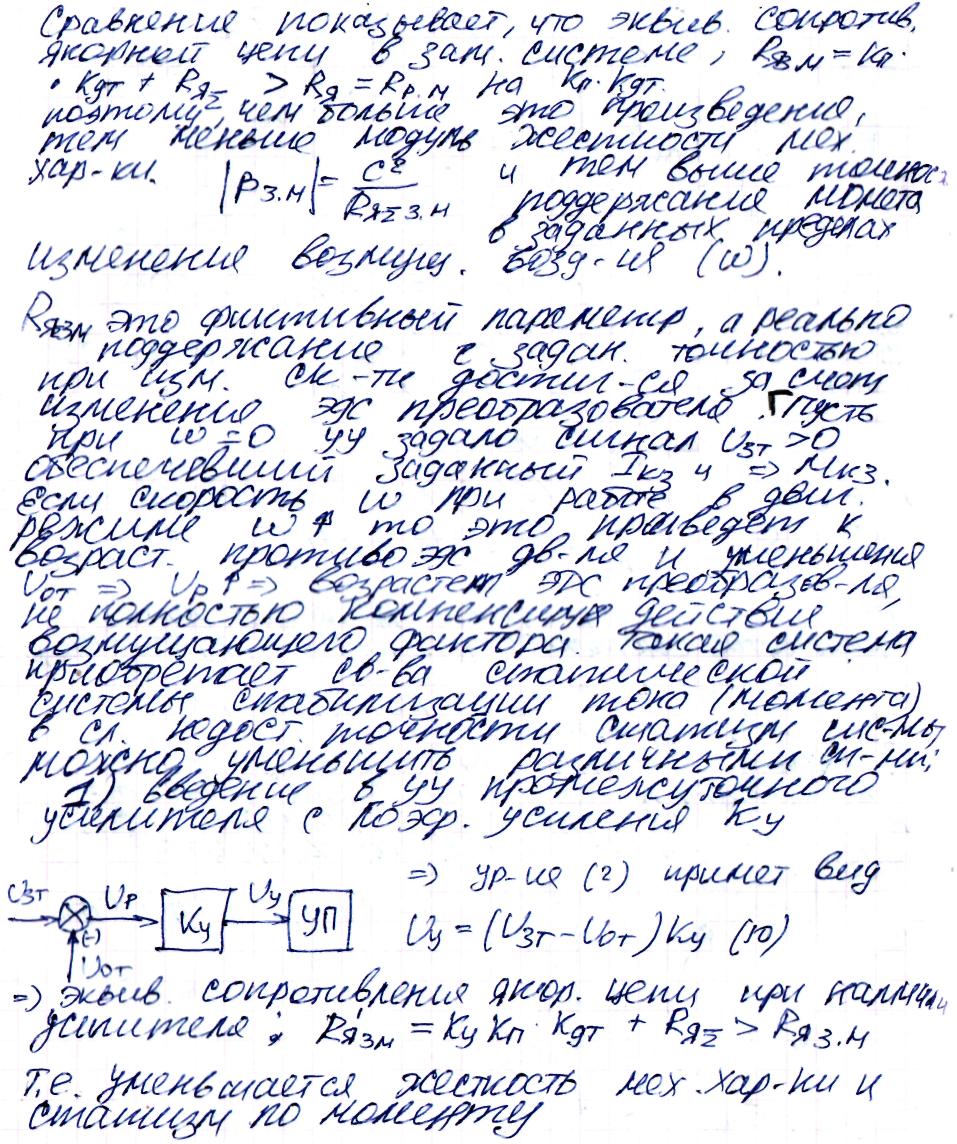
57. Уменьшение статизма системы УП-Д с о.о.с. по току якоря введением в УУ промежуточного усилителя. Электрическая схема, математическое описание, механические характеристики.
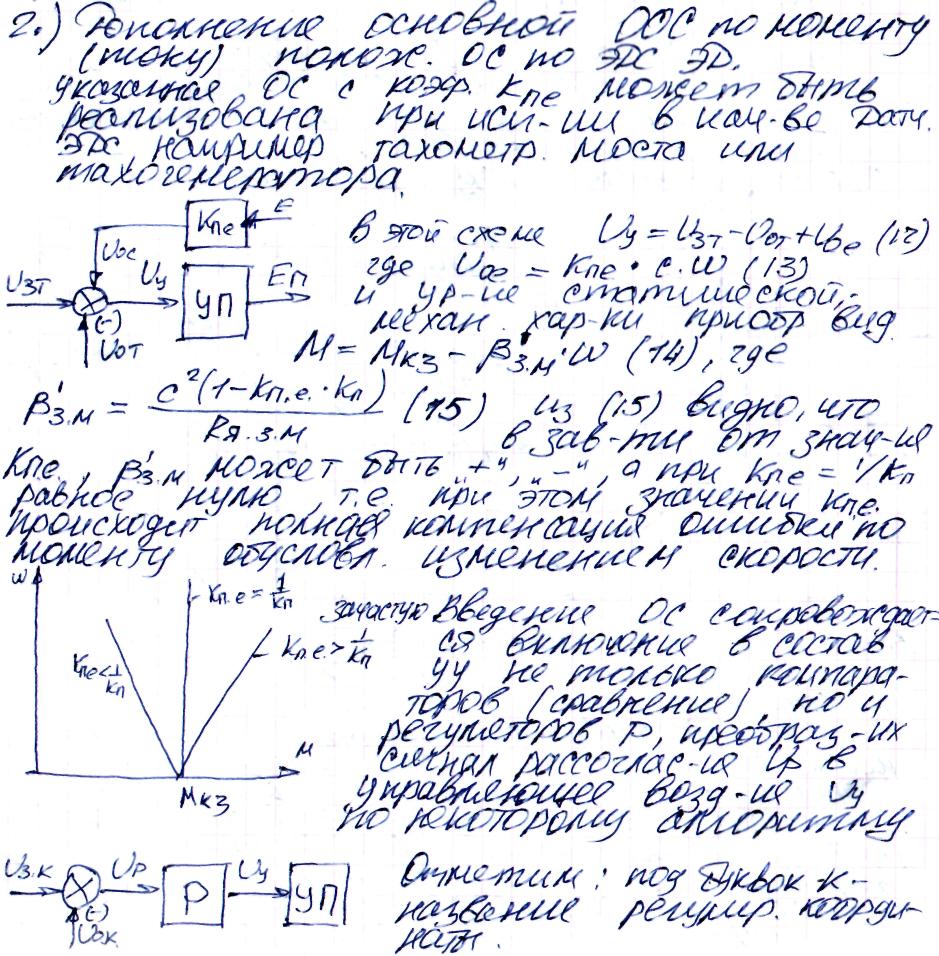
58. Уменьшение статизма системы УП-Д с о.о.с. по току якоря дополнением основной о.о.с. по моменту (току) п.о.с. по ЭДС двигателя. Электрическая схема, математическое описание, механические характеристики.
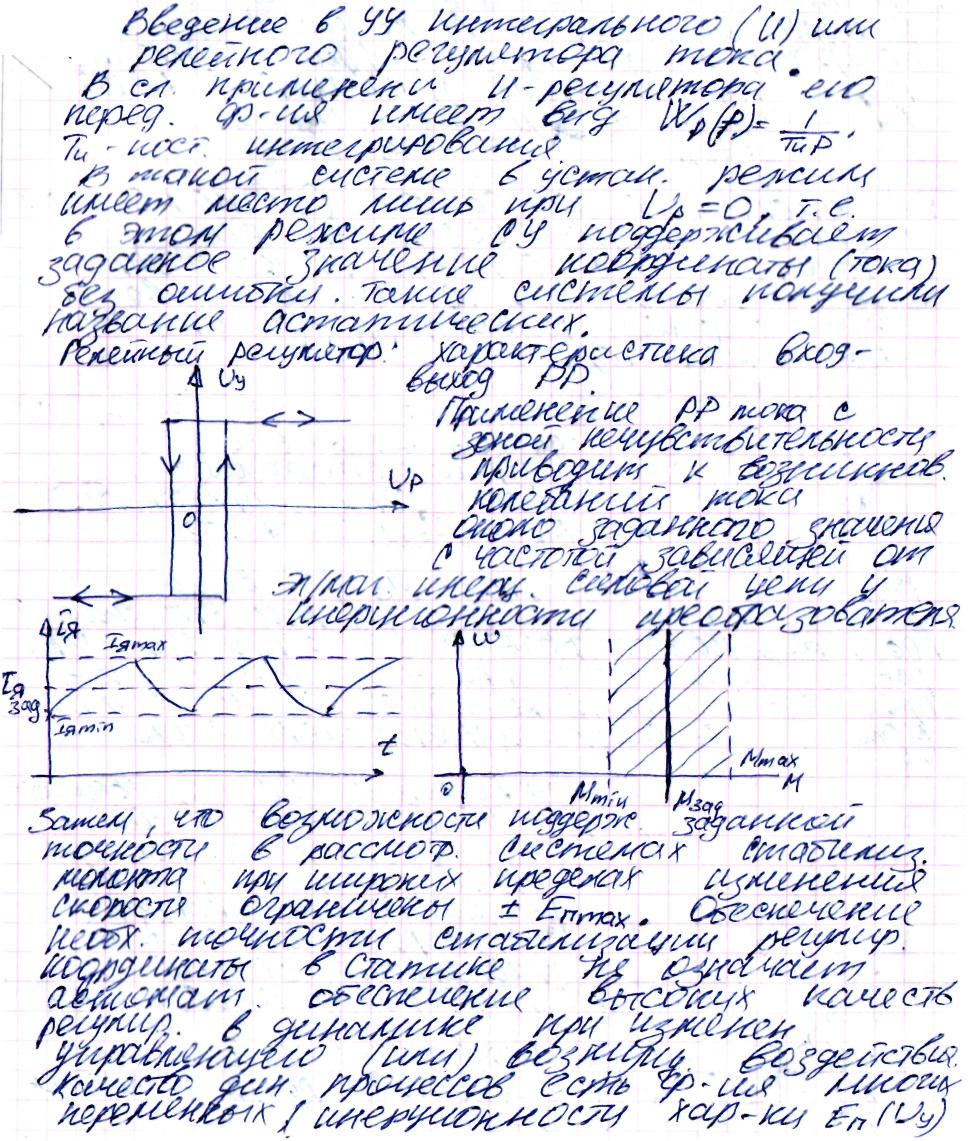
59. Уменьшение статизма системы УП-Д с о.о.с. по току якоря введением в УУ интегрального или релейного регулятора тока. Электрическая схема, математическое описание, механические характеристики.
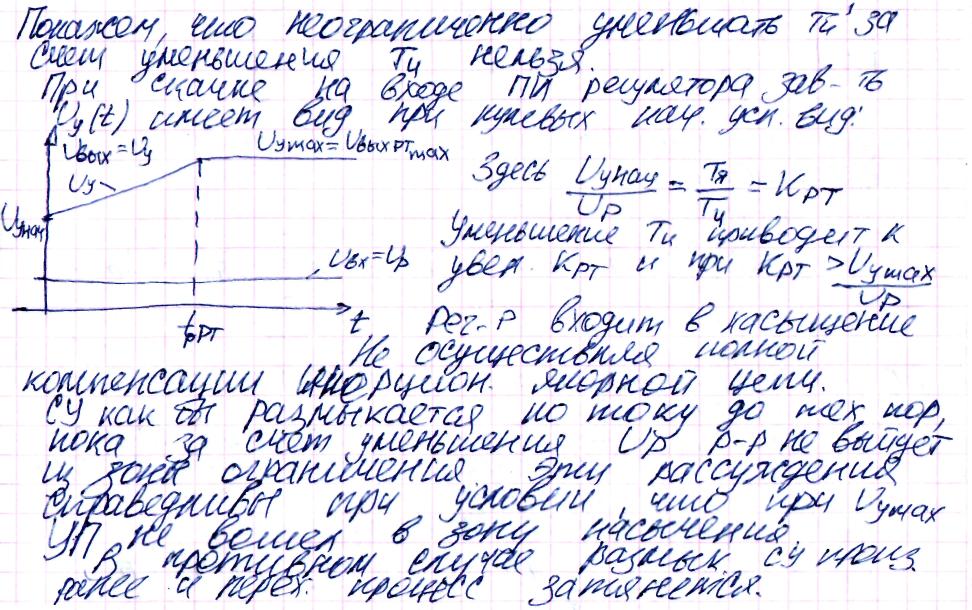
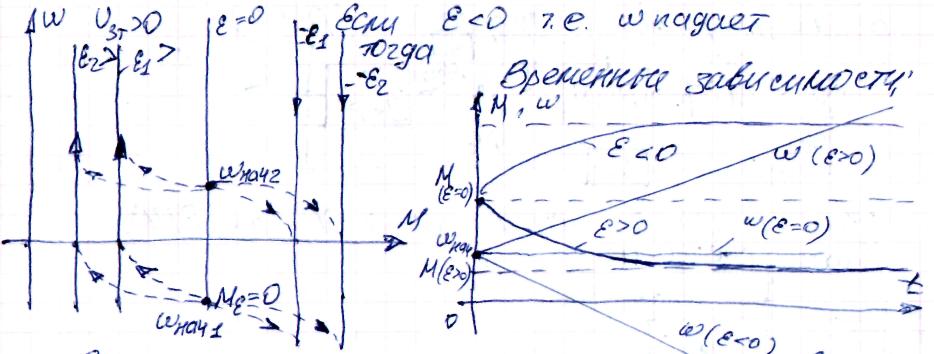
60. Отработка линейно меняющегося во времени возмущения в системе УП-Д с безынерционным УП и ПИ-регулятором тока. Структурная схема, передаточная функция по возмущающему воздействию. Зависимость ∆Iя(t), механические характеристики при различных значениях ε, характеристики ω (t) и M(t) при отработке скачка ускорения.