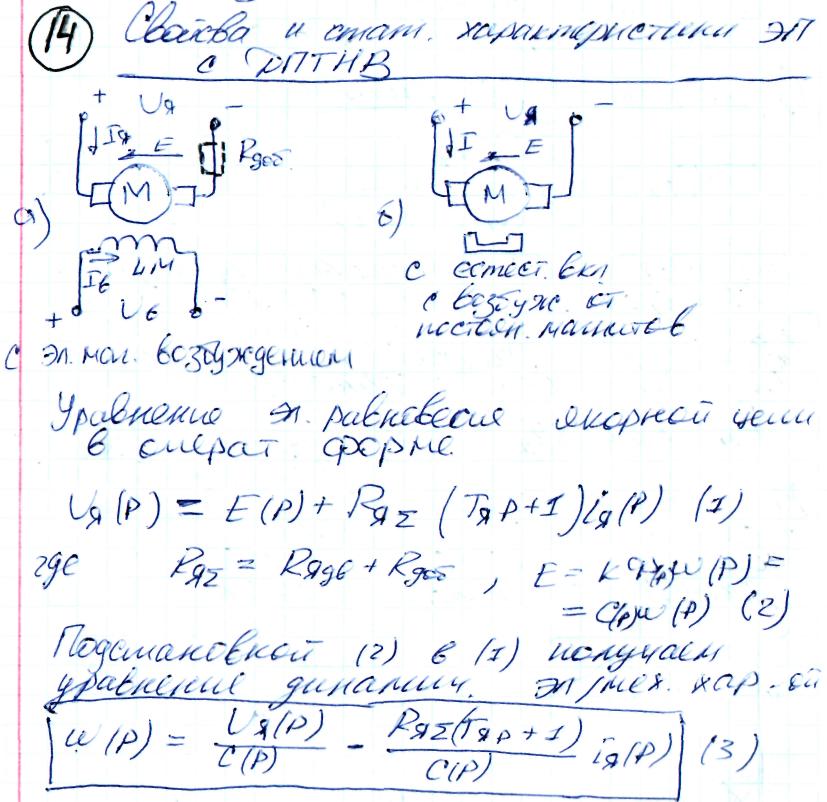
14. Эп с дптнв. Режимы работы и статические характеристики. Реостатное регулирование скорости и момента эп.
15. ЭП с ДПТНВ. Регулирование скорости ЭП с разомкнутой САУ изменением напряжения на якоре. Схема, характеристики, показатели регулирования.

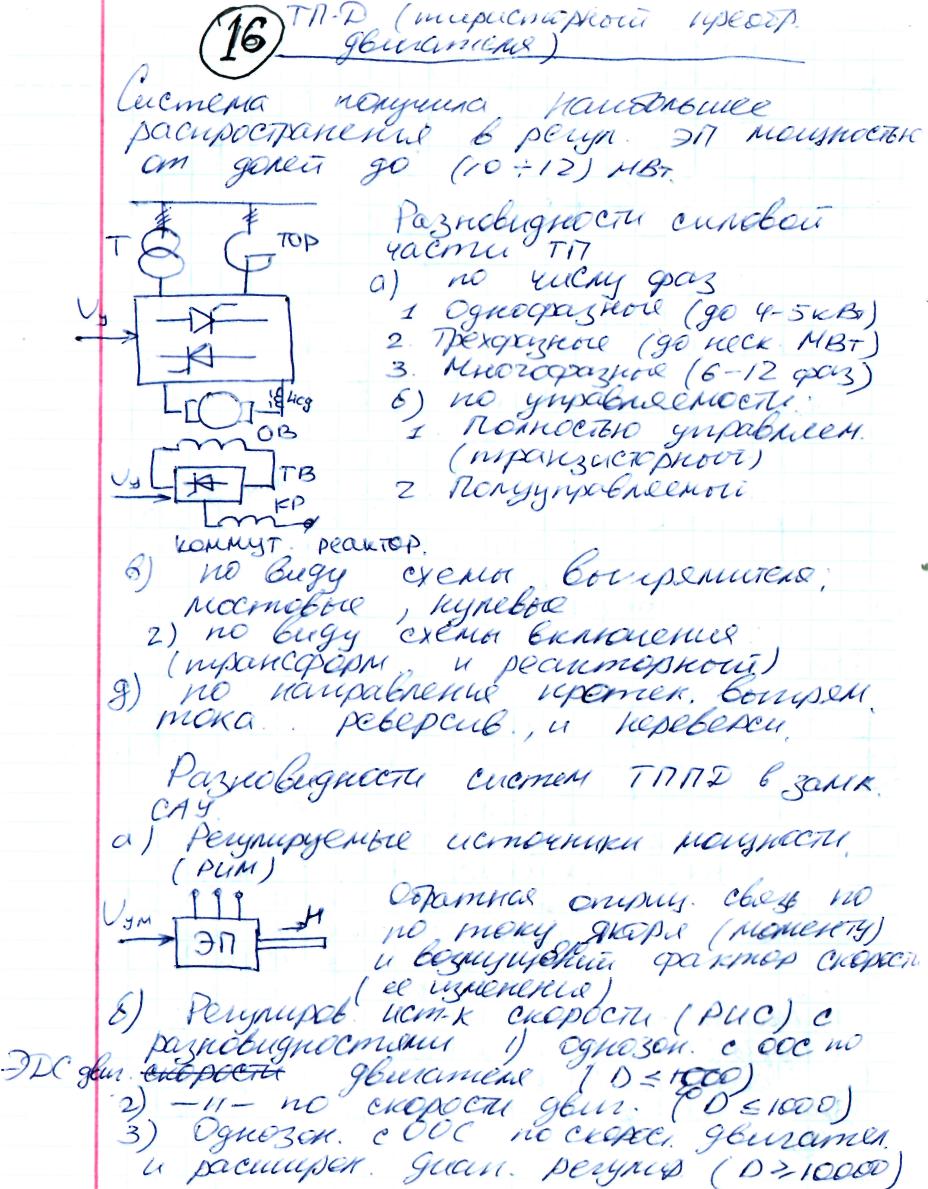
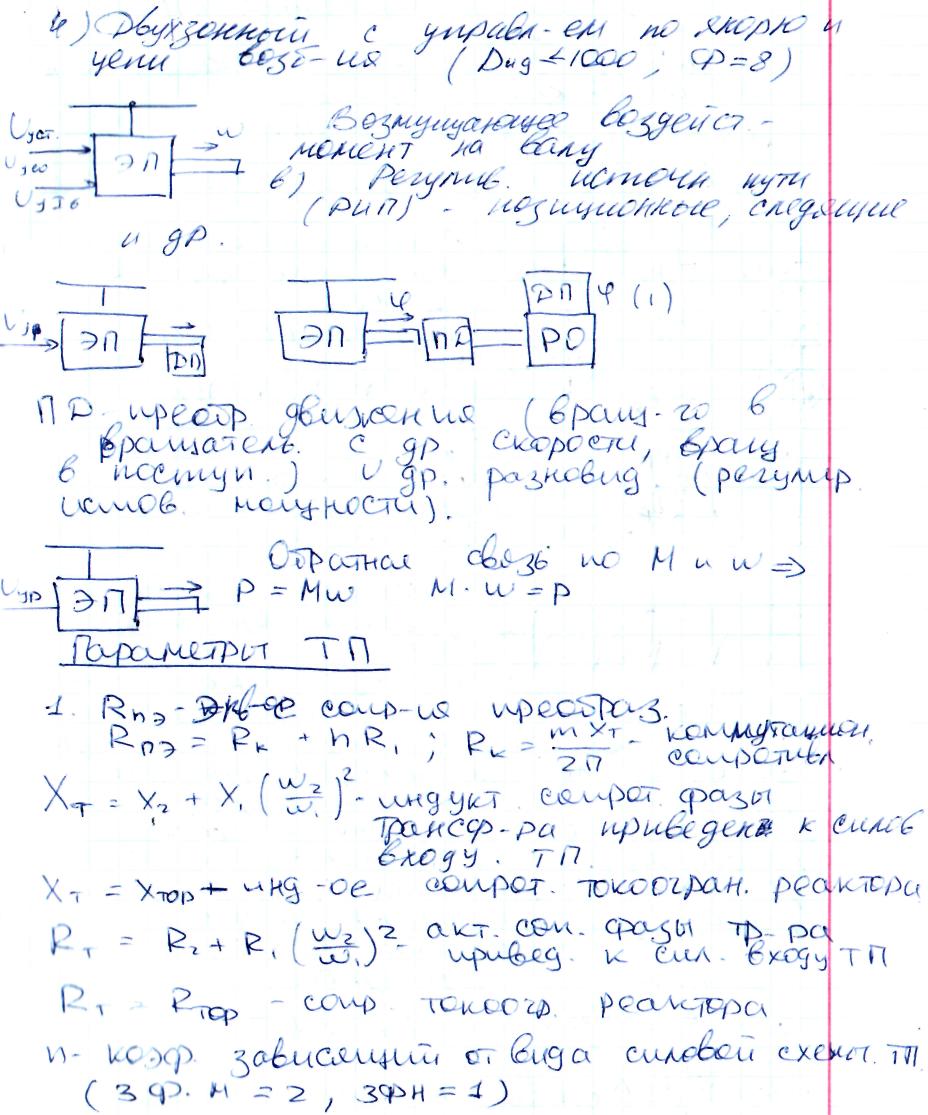
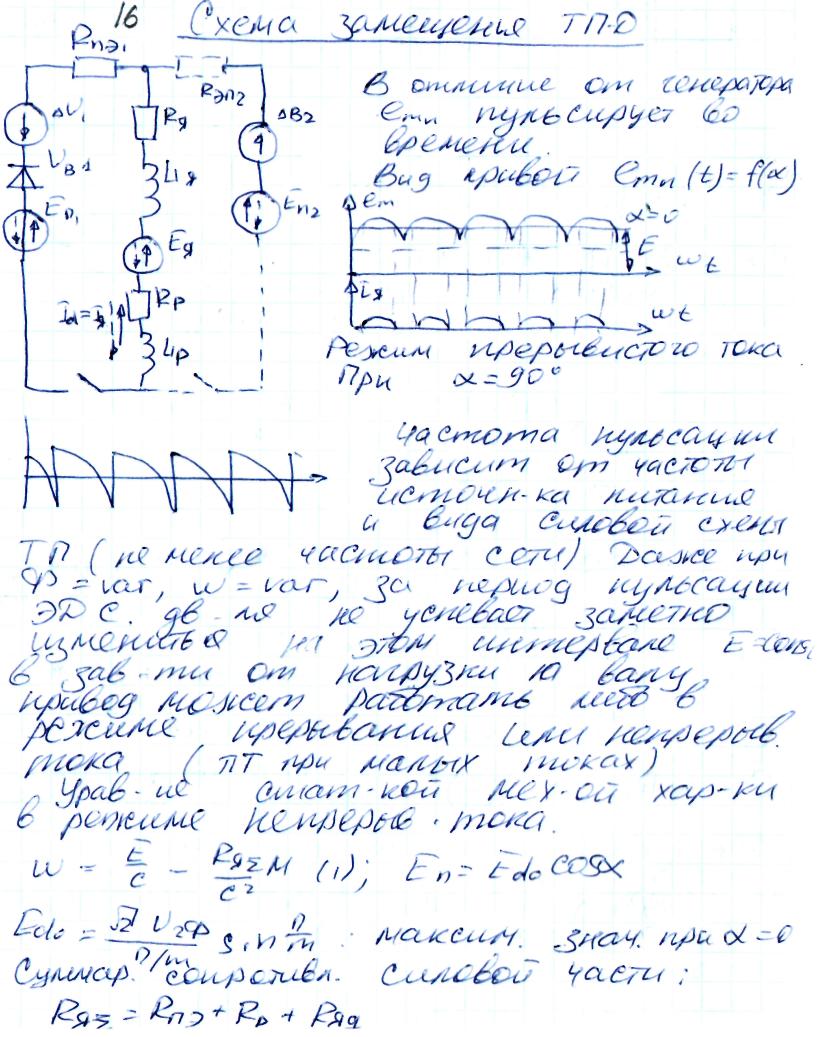
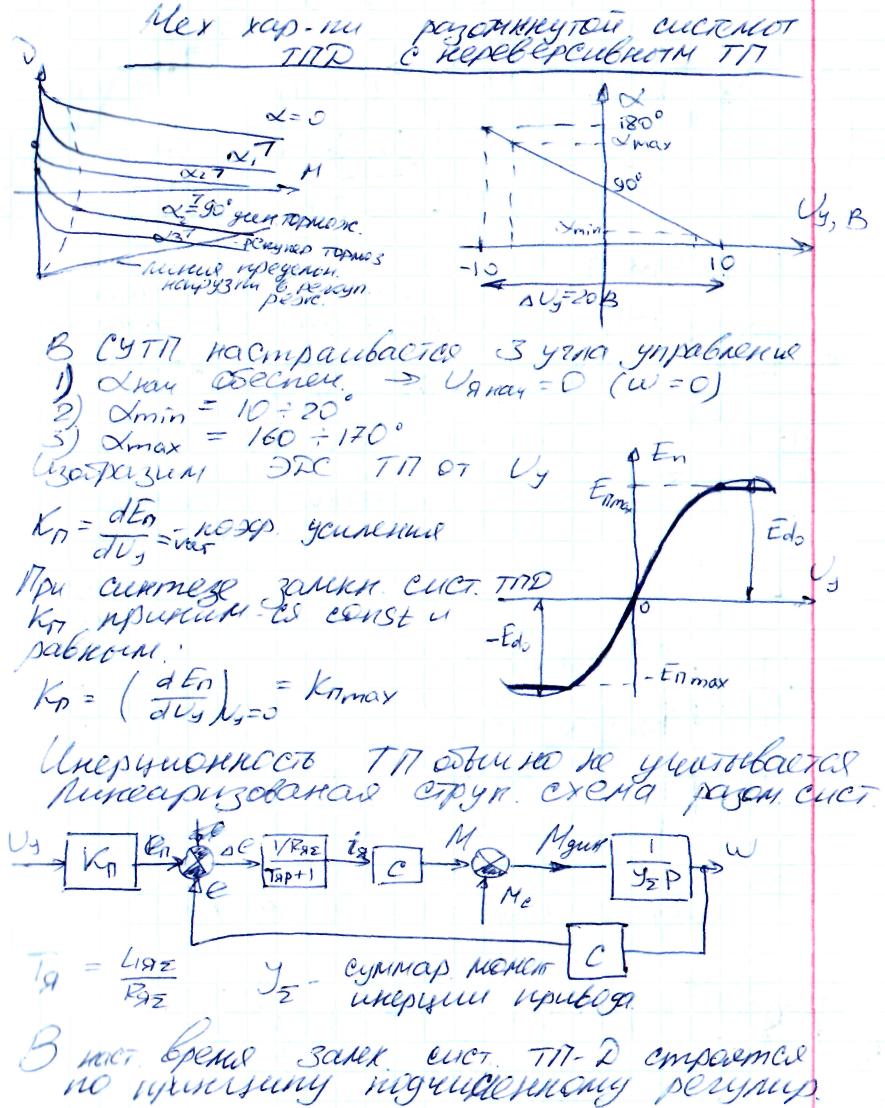
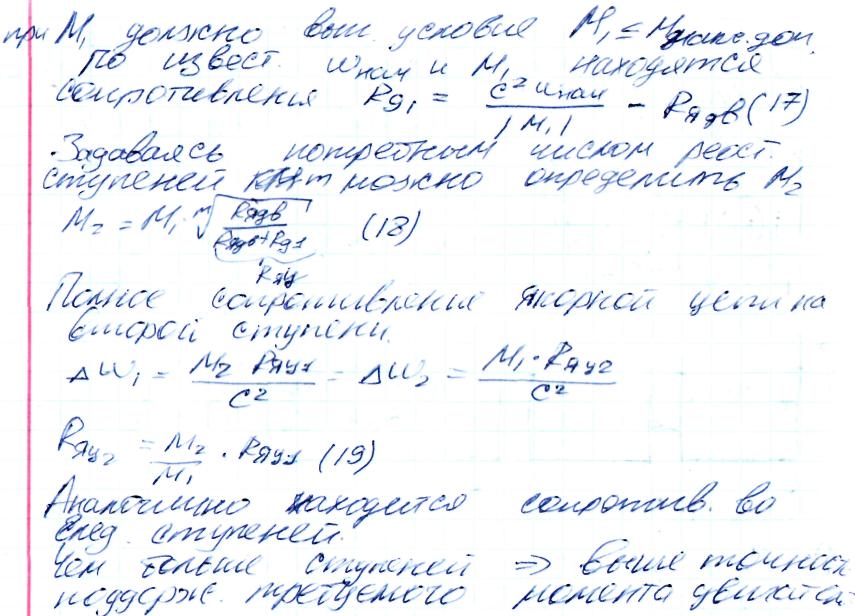
16. Система ТП-Д. Электрическая схема и схема замещения. Параметры. Механические характеристики. Достоинства и недостатки в сравнении с системой ШИП-Д.
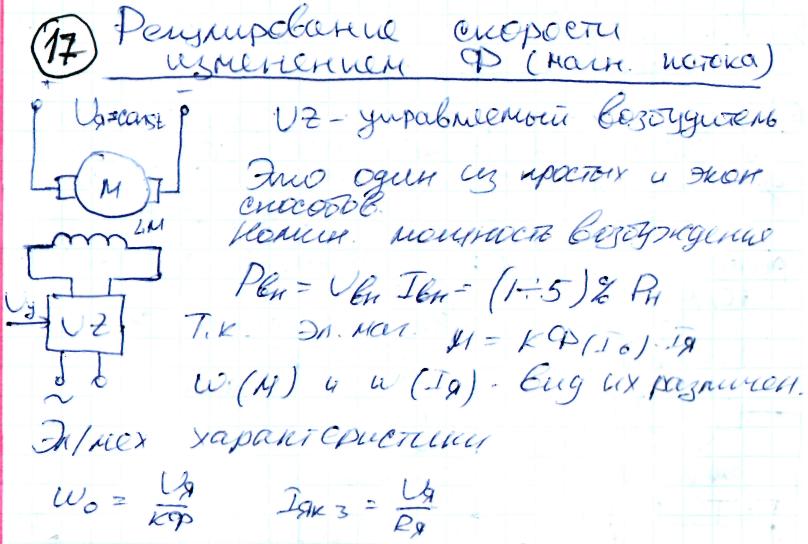
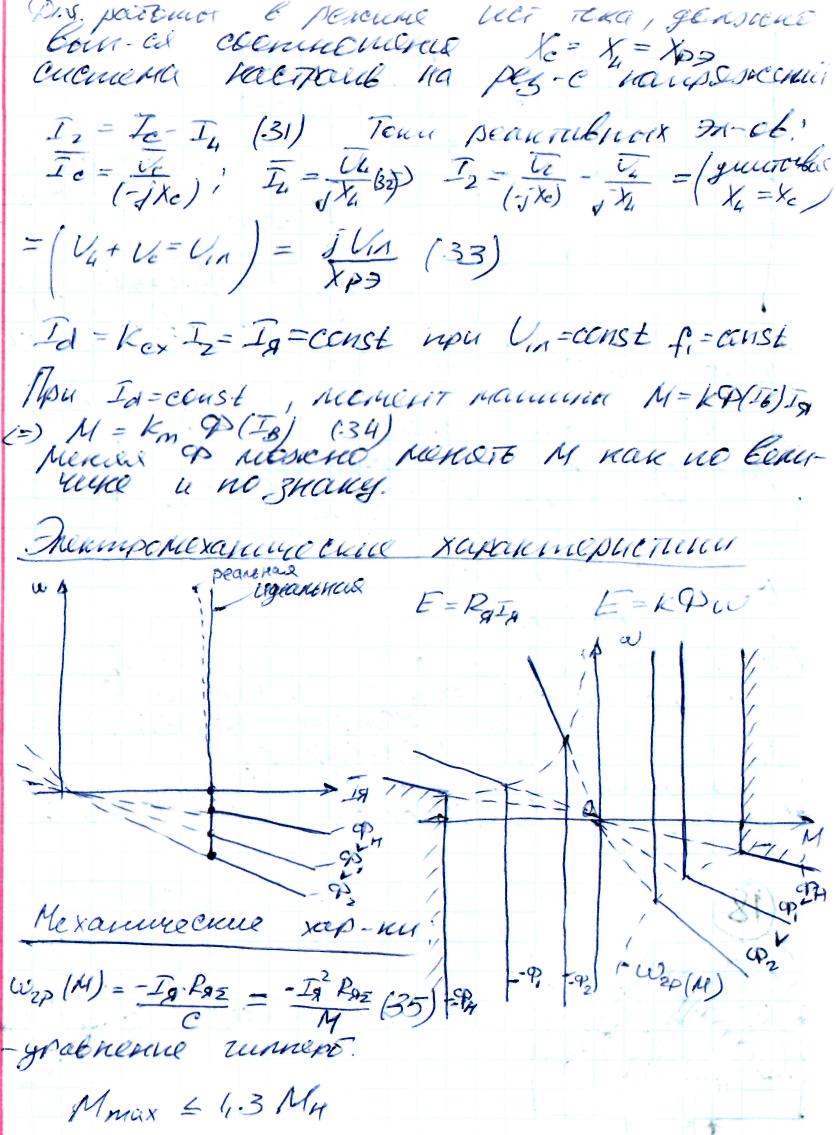
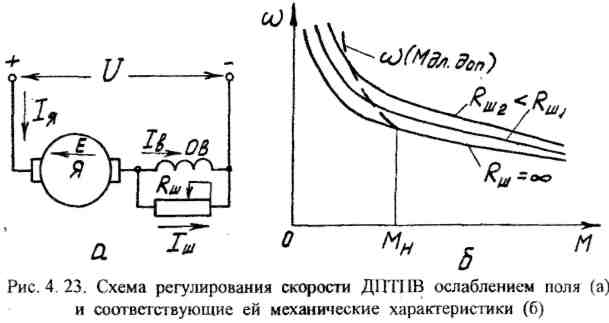
17. Регулирование скорости ДПТНВ изменением магнитного потока. Схема, механические и электромеханические характеристики, показатели регулирования.

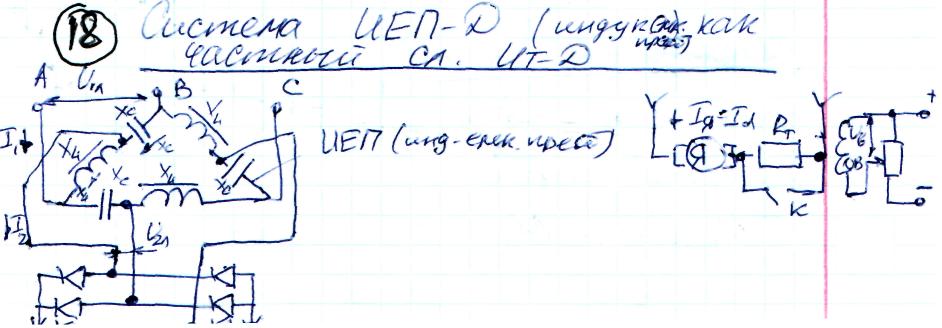
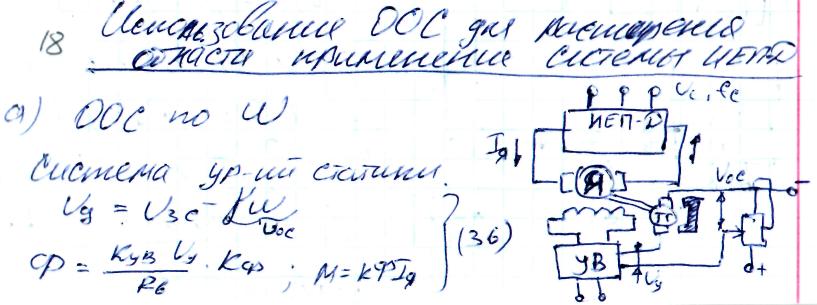
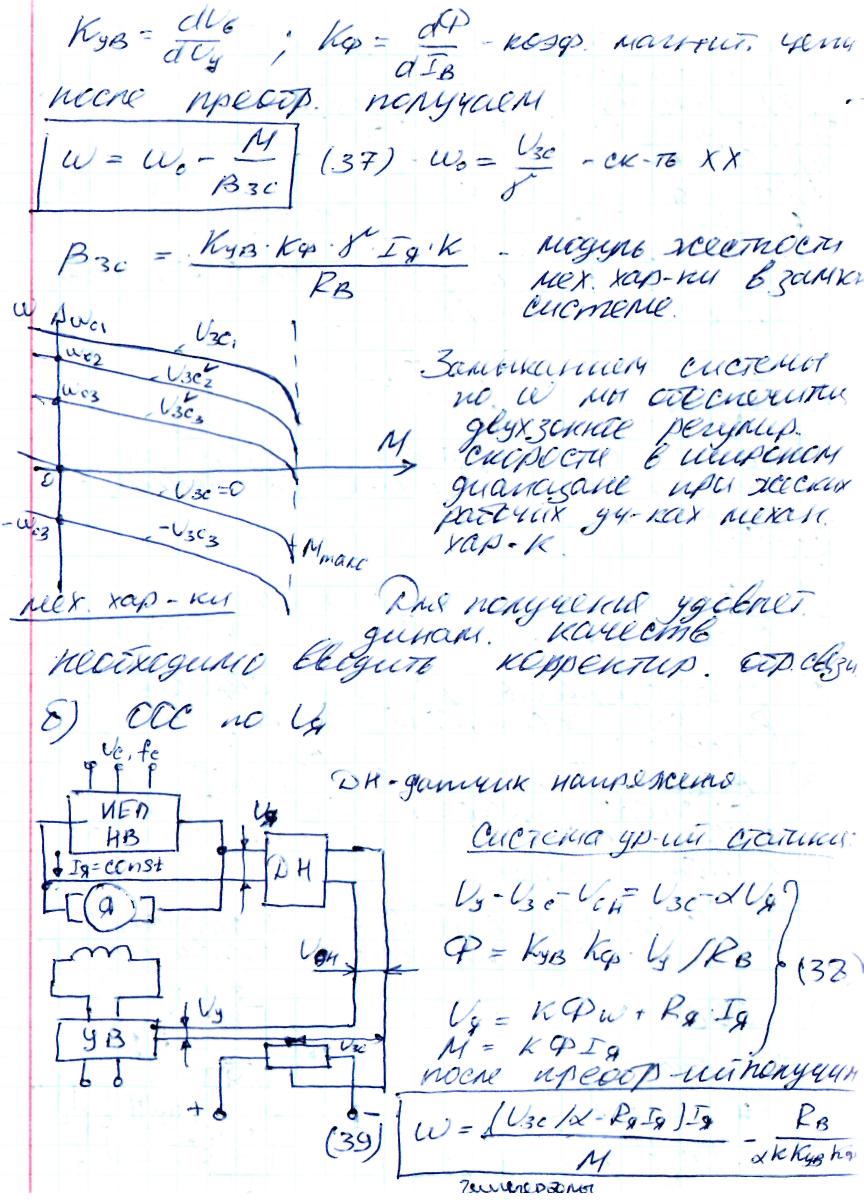
18. Система ИЕП-Д. Схемы, математическое описание и механические характеристики ЭП: а) с разомкнутой САУ, б) с о.о.с. по скорости.
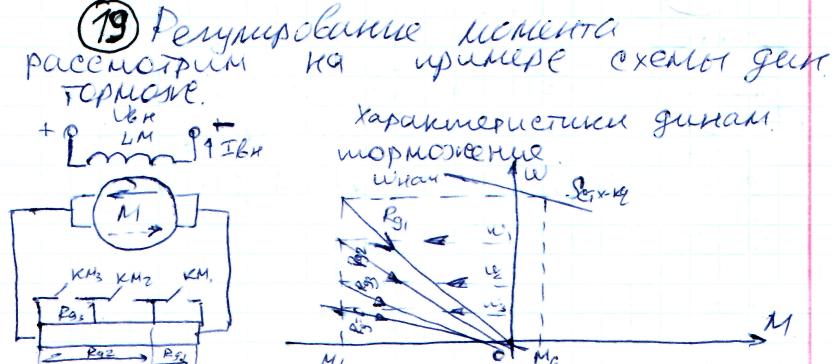
19. Тормозные режимы работы ДПТНВ, схемы, характеристики. Оценка экономичности способов торможения.
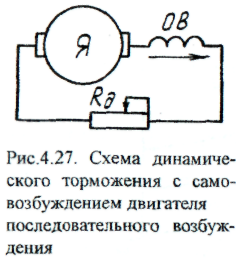
20. ЭП с ДПТПВ. Естественные схема включения и характеристики. Двигательный и тормозные режимы. Реостатное регулирование скорости.
В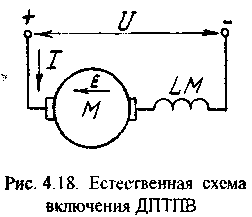 указанных двигателях обмотка возбуждения
LM
предназначена для последовательного
включения в якорную цепь (рис. 4.18), поэтому
она выполняется
проводом того же сечения, что и обмотка
якоря, имеет малое активное сопротивление
Rв
< Rя,
и в электрических схемах изображается
иначе, чем обмотка независимого
возбуждения. В подавляющем большинстве
двигателей на зажимы клеммной колодки
выводятся оба конца обмотки якоря
и оба конца обмотки возбуждения. В
некоторых двигателях
указанных двигателях обмотка возбуждения
LM
предназначена для последовательного
включения в якорную цепь (рис. 4.18), поэтому
она выполняется
проводом того же сечения, что и обмотка
якоря, имеет малое активное сопротивление
Rв
< Rя,
и в электрических схемах изображается
иначе, чем обмотка независимого
возбуждения. В подавляющем большинстве
двигателей на зажимы клеммной колодки
выводятся оба конца обмотки якоря
и оба конца обмотки возбуждения. В
некоторых двигателях
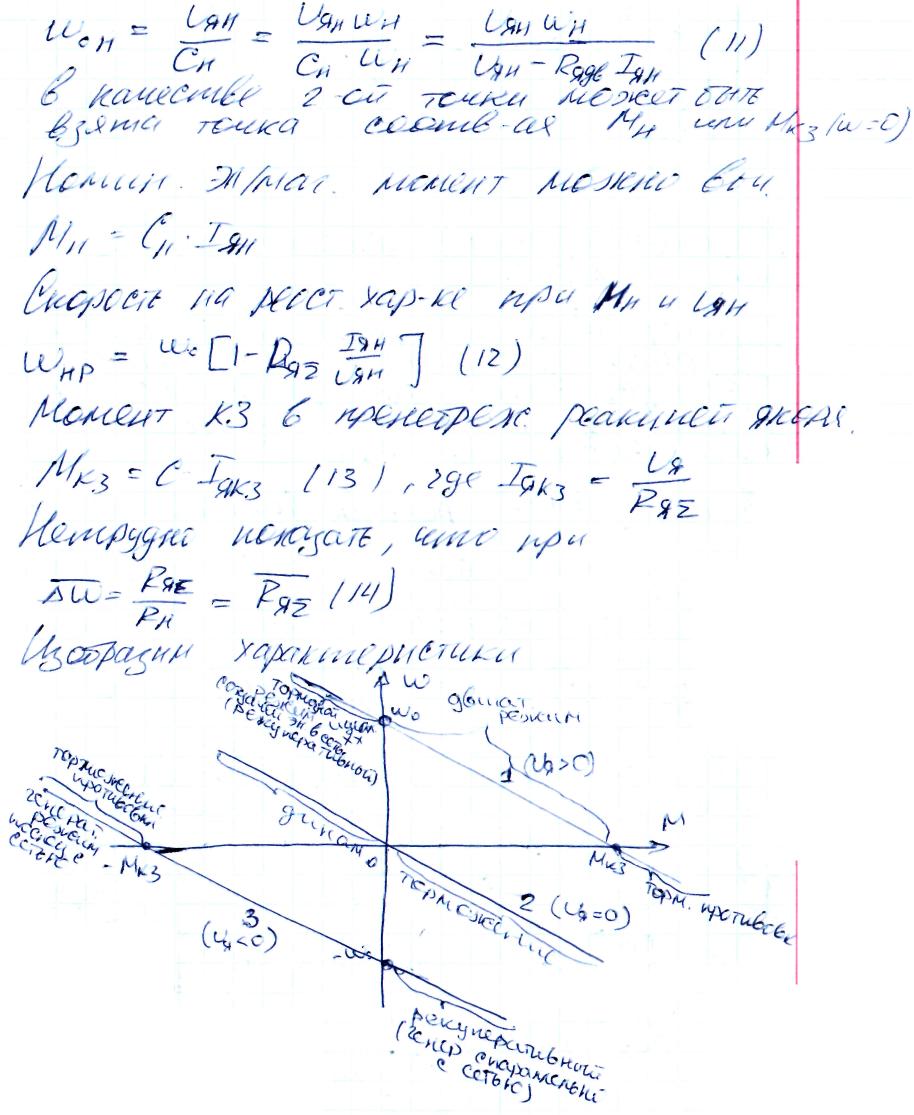
Естественными называются статические характеристики двигателя (см. рис. 4.18) при номинальном напряжении питания U = UH и отсутствии добавочных сопротивлений (рис. 4.20,а,б). Штриховыми линиями на них показаны характеристики идеального двигателя с внутренним сопротивлением Rдв = О, называемые граничными характеристиками. Коэффициенты допустимых перегрузок по току и моменту двигателей последовательного возбуждения лежат в пределах л1 = Iдоп Iн = =2...2,5, л = Мдоп,/Мн = 2,5..З.
Особенностью естественной механической характеристики двигателя является условие работы с примерным постоянством мощности (источник мощности). Во избежание недопустимого повышения скорости минимальная нагрузка двигателя по моменту не должна быть меньше 20...25% номинальной.
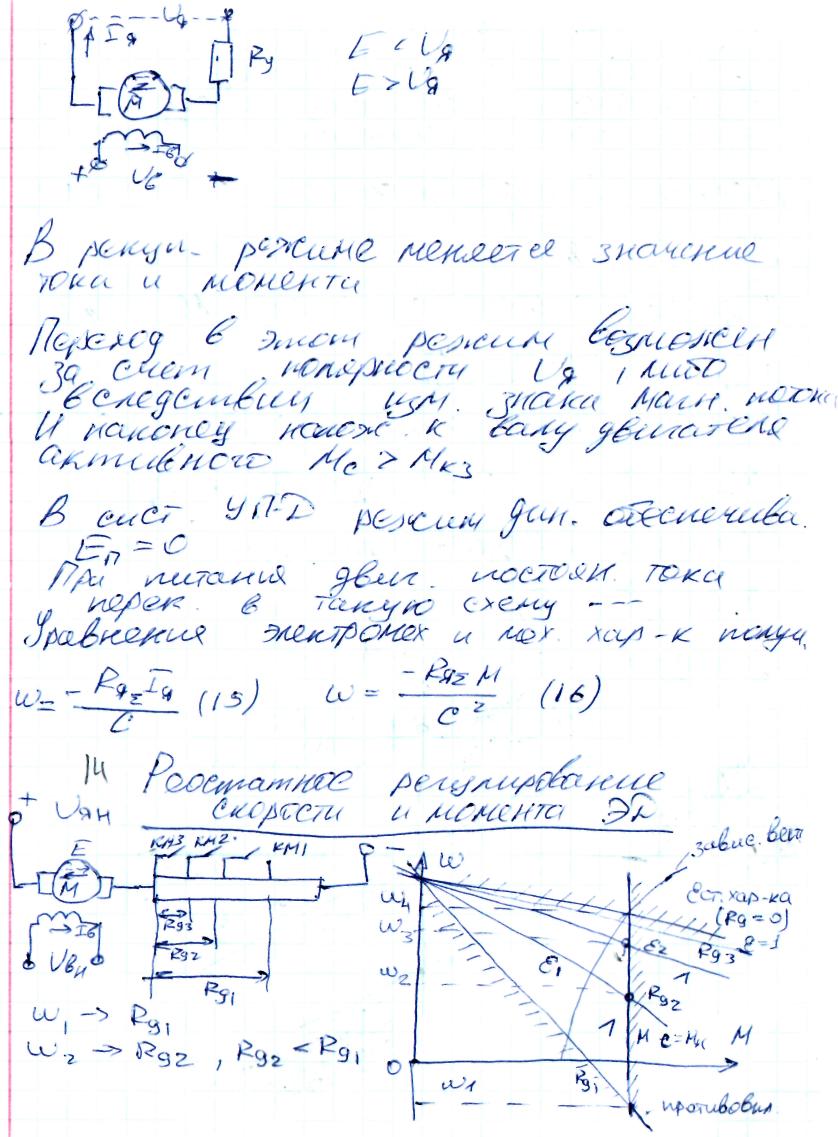
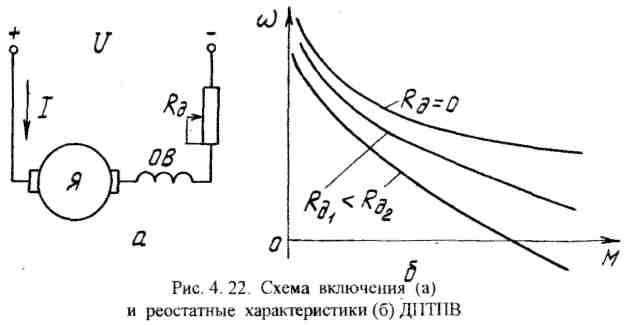
Реостатное регулирование скорости и момента двигателя обеспечивается введением в силовую цепь добавочных резисторов (рис. 4 22,а) при напряжении питания, обычно равном номинальному. В случае U = UH, используя уравнения естественной wе = (Uн-IRдв)/с(I) и реостатной w = [UH-I(Rдв + Rд)]/с(I) электромеханических характеристик, получаем зависимость w( we) при заданном токе
![]()
С помощью (4.51), естественной характеристики we(I) и зависимости М(1) нетрудно рассчитать и построить механическую характеристику для любого Rд (рис. 4.22,6). Из (4.51) при Rz=Rдв +Rд = 0 получается соотношение для расчета граничной характеристик
21. Тормозные режимы работы ДПТПВ. Схемы и механические характеристики.
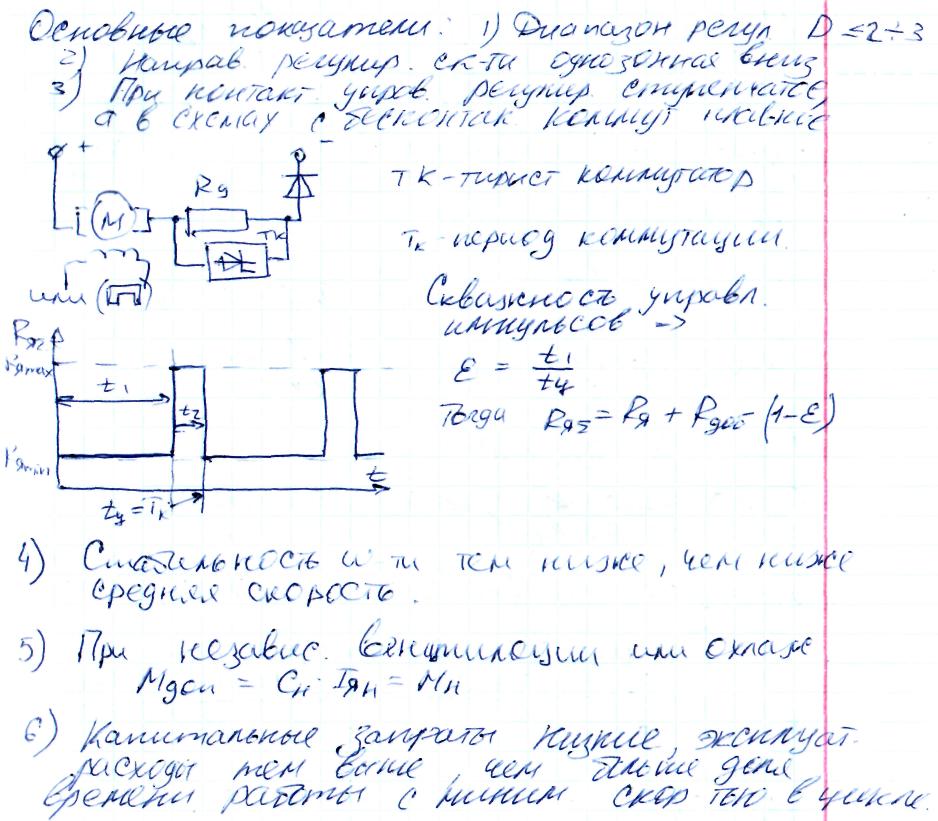
При работе на характеристиках с и =0 и двигатель замкнут накоротко и работает в тормозном режиме. Этот режим получил название динамического торможения с самовозбуждением. В общем случае при работе двигателя в указанном режиме в якорную цепь вводят внешний резистор Rд (рис. 4.27). Для возникновения режима самовозбуждения должно быть выполнено несколько условий. Первое - наличие потока остаточного намагничивания Ф0. Самовозбуждение невозможно, если машина полностью размагничена. Второе условие самовозбуждения - совпадение по знаку потока Ф0 с потоком, создаваемым током в обмотке возбу ждения. Это условие обеспечивается включением обмоток возбуждения и якоря (согласным или встречным) при выбранном или заданном направлении вращения якоря. Например, если машина, включенная по схеме рис. 4.27, не возбуждается при заданном направлении вращения якоря, то необходимо переключить либо выводы якоря, либо выводы обмотки возбуждения. Третье условие самовозбуждения иллюстрирует рис. 4.28,а. На нем кривыми линиями показаны зависимости ЭДС от тока при со = const, а прямолинейные характеристики - это зависимости падения напряжения в суммарном сопротивлении якорной цепи /\U = REI = (Rдв+Rд)I от тока при RЕ = const. Режим самовозбуждения возможен при условии Е = кФ(1)w= RЕI. При большом сопротивления Rzi это условие не выполняется даже при вращении якоря с большой
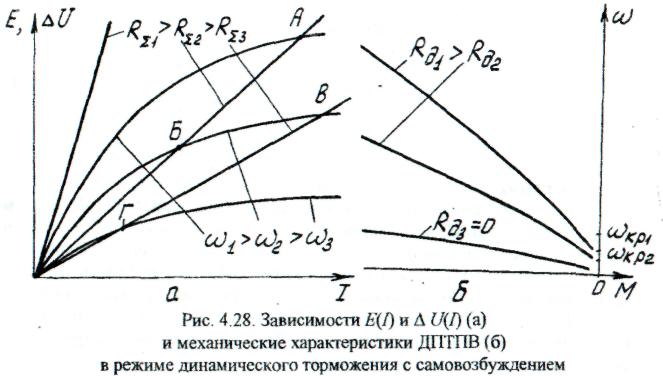
скоростью w1) и самовозбуждения не происходит. Меньшему сопротивлению RE2 при скорости w1 соответствует точка А установившегося режима. Снижение скорости двигателя приводит к уменьшению тока и момента установившегося режима (точка Б при w =w2). Скорость, при которой начальный линейный участок кривой Е(I) совпадает с прямой /\U(I), называется критической. Это скорость срыва самовозбуждения при снижении скорости двигателя или скорость начала самовозбуждения при увеличении его скорости. Убыстрение процесса торможения привода достигается уменьшением сопротивления RE в функции его скорости (сравните токи и моменты двигателя в точках Б и В на рис 4.28,а). Механические характеристики рассматриваемого режима изображены на рис. 4.28,6.
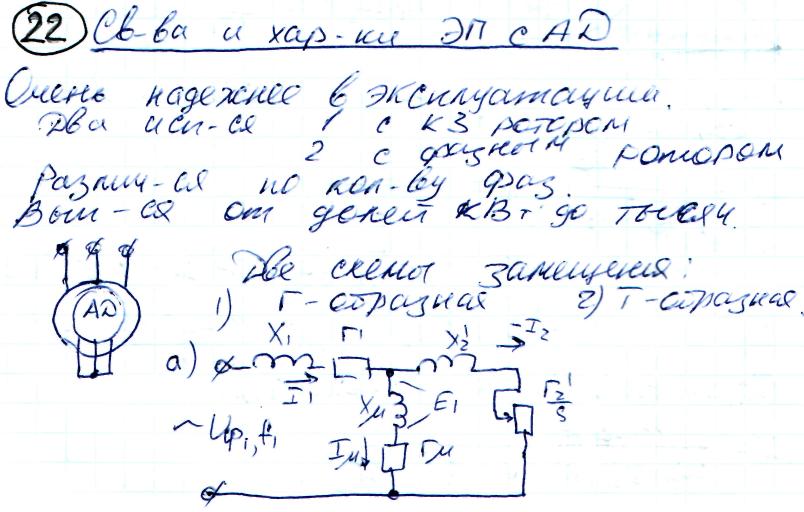
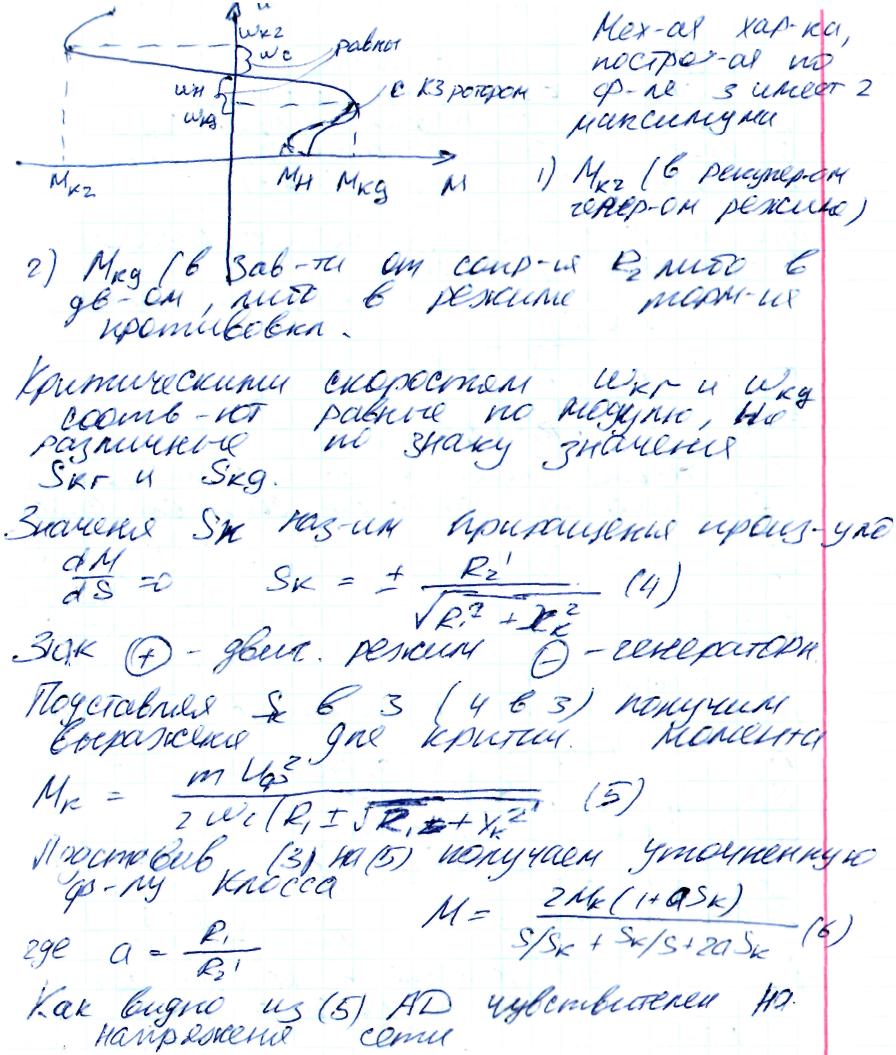
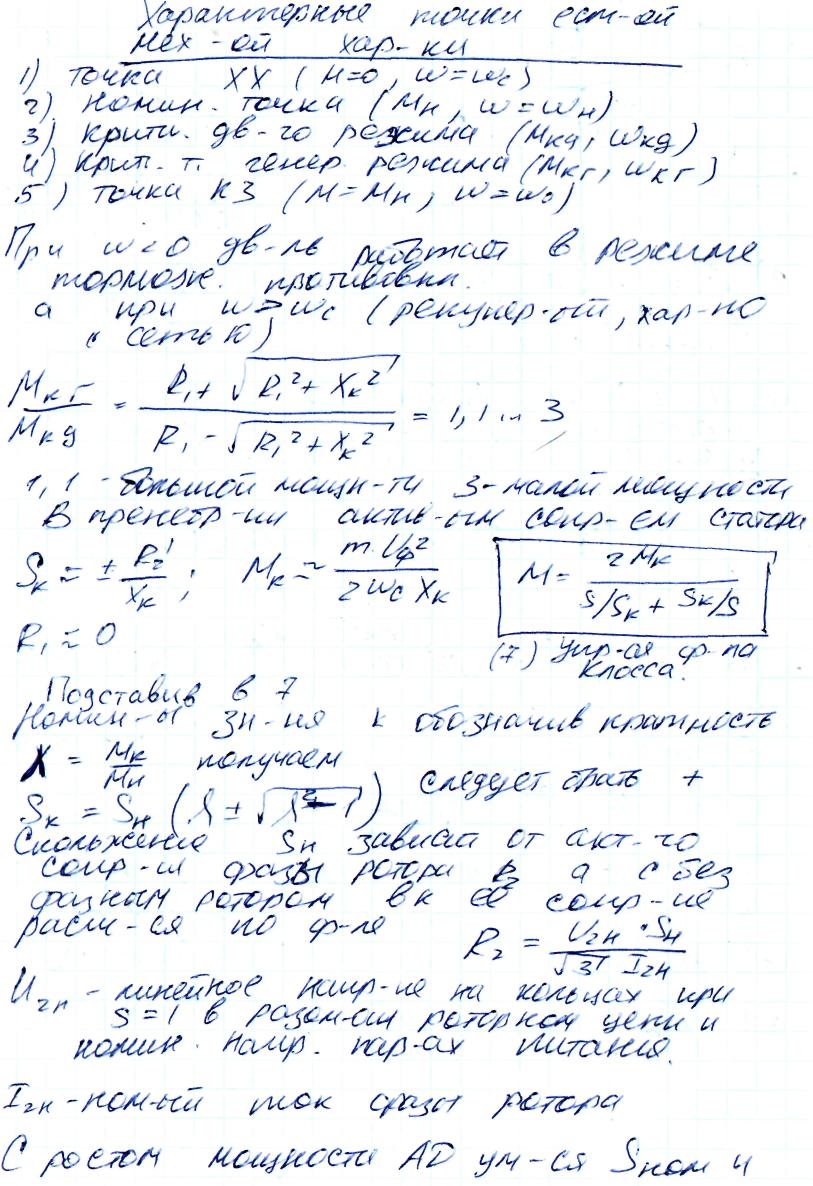
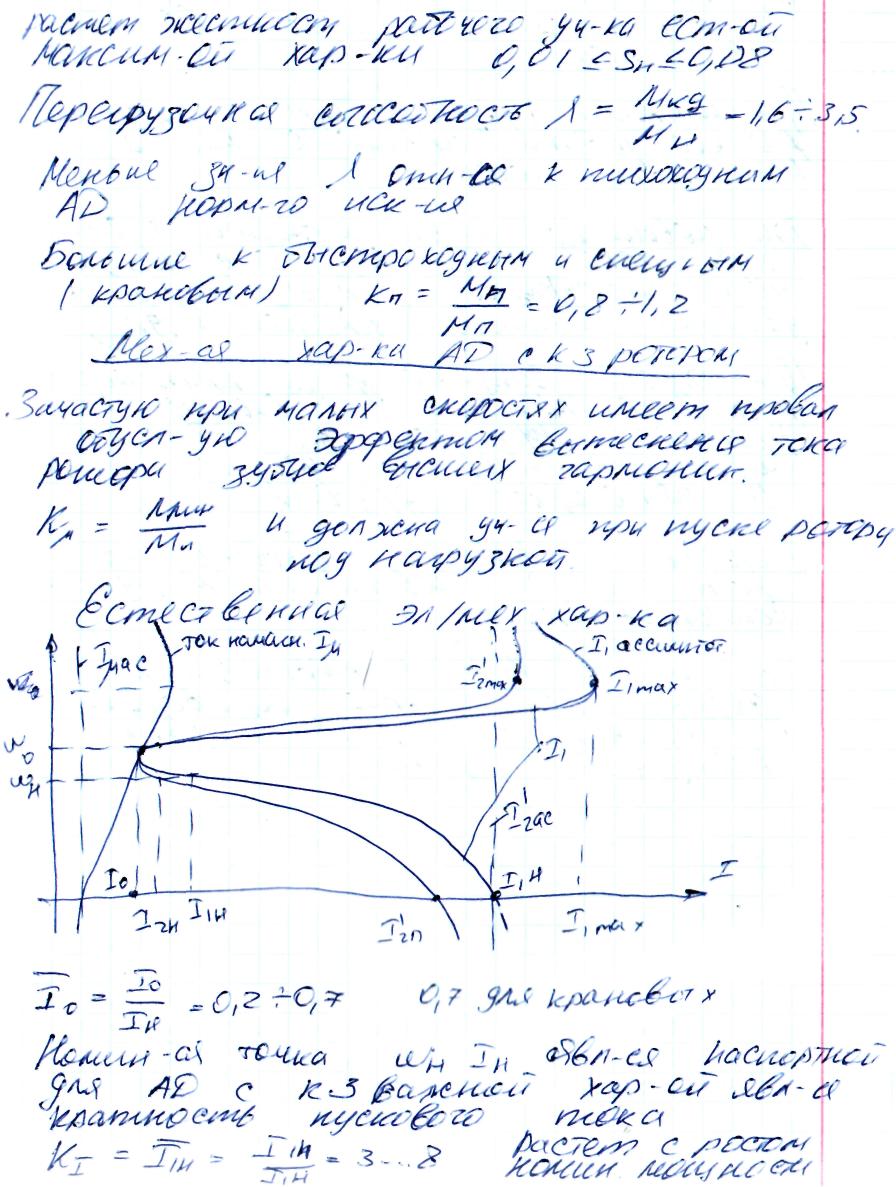
22. Электрическая схема и Т-образная схема замещения АД. Естественные механическая и электромеханические характеристики и их особые точки.

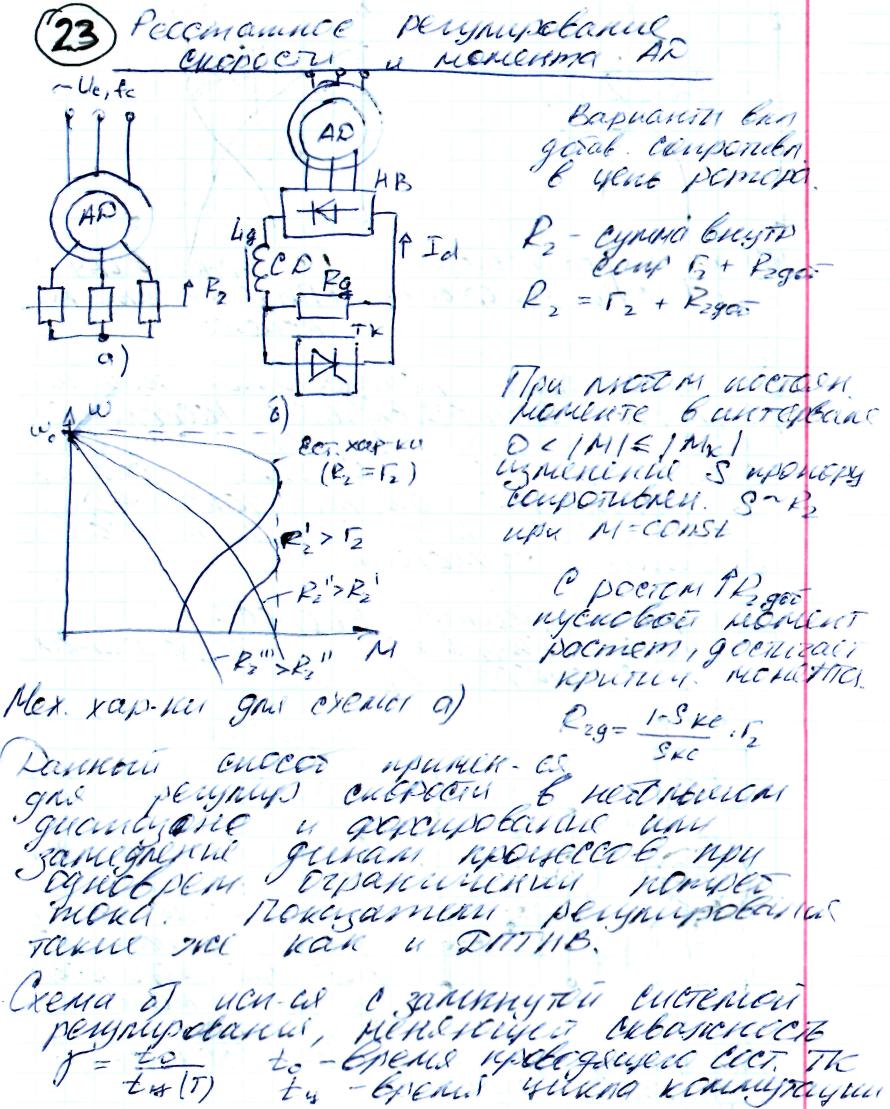
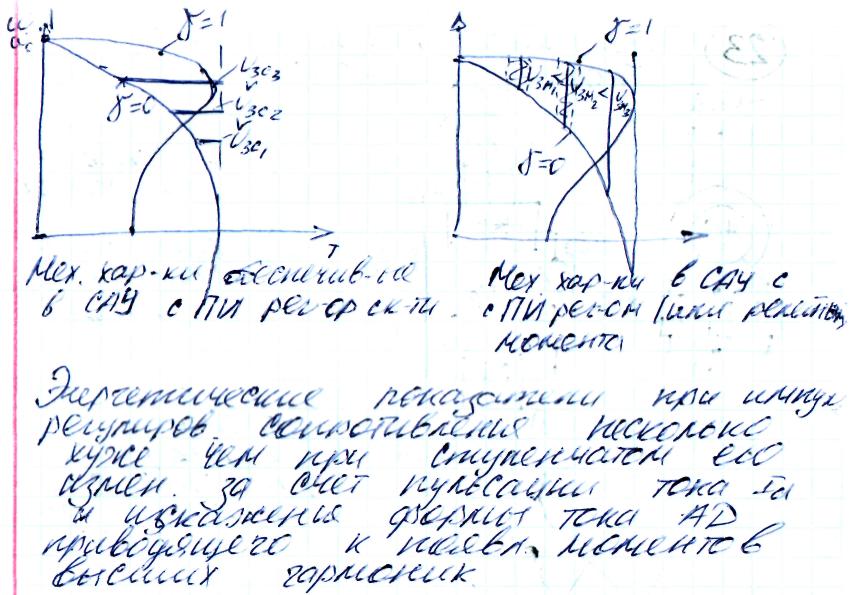
23. Реостатное регулирование скорости АД. Схема, механические характеристики, основные показатели регулирования скорости.
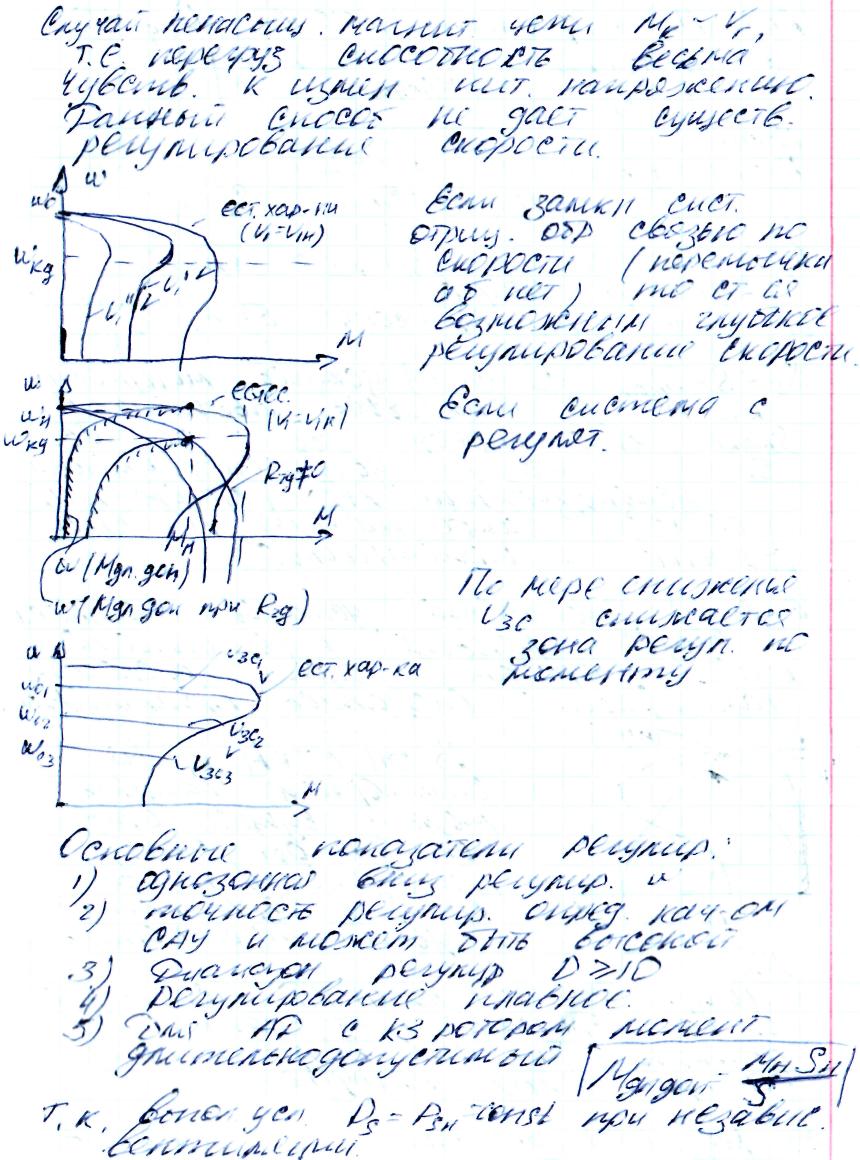
24. Регулирование скорости АД в системе РН-АД. Схема и механические характеристики в разомкнутой и замкнутой САУ. Основные показатели регулирования.

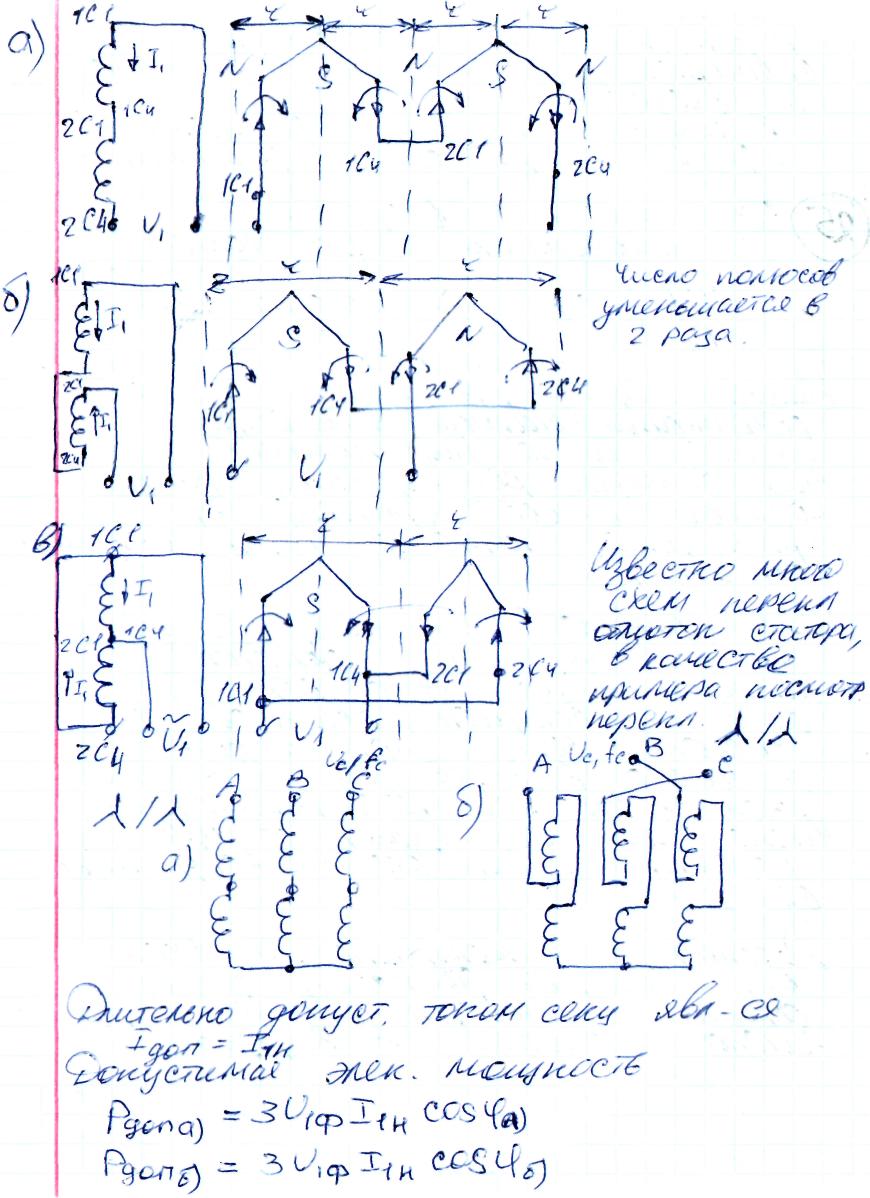
25. Регулирование скорости АД переключением числа полюсов. Схемы, механические характеристики, основные показатели регулирования.


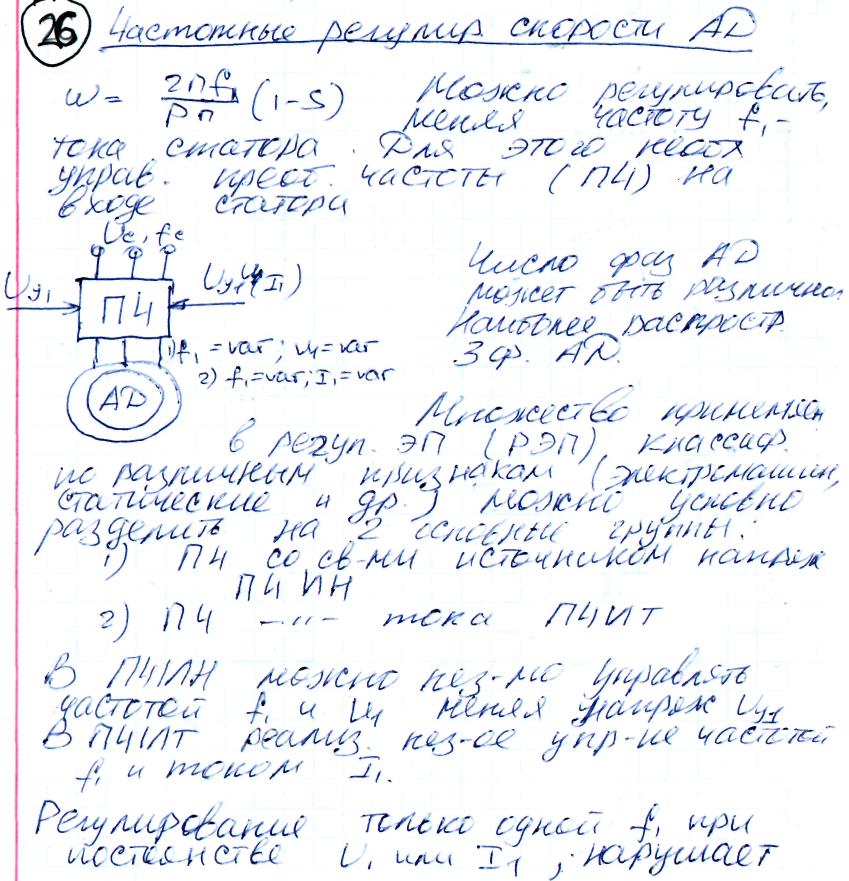
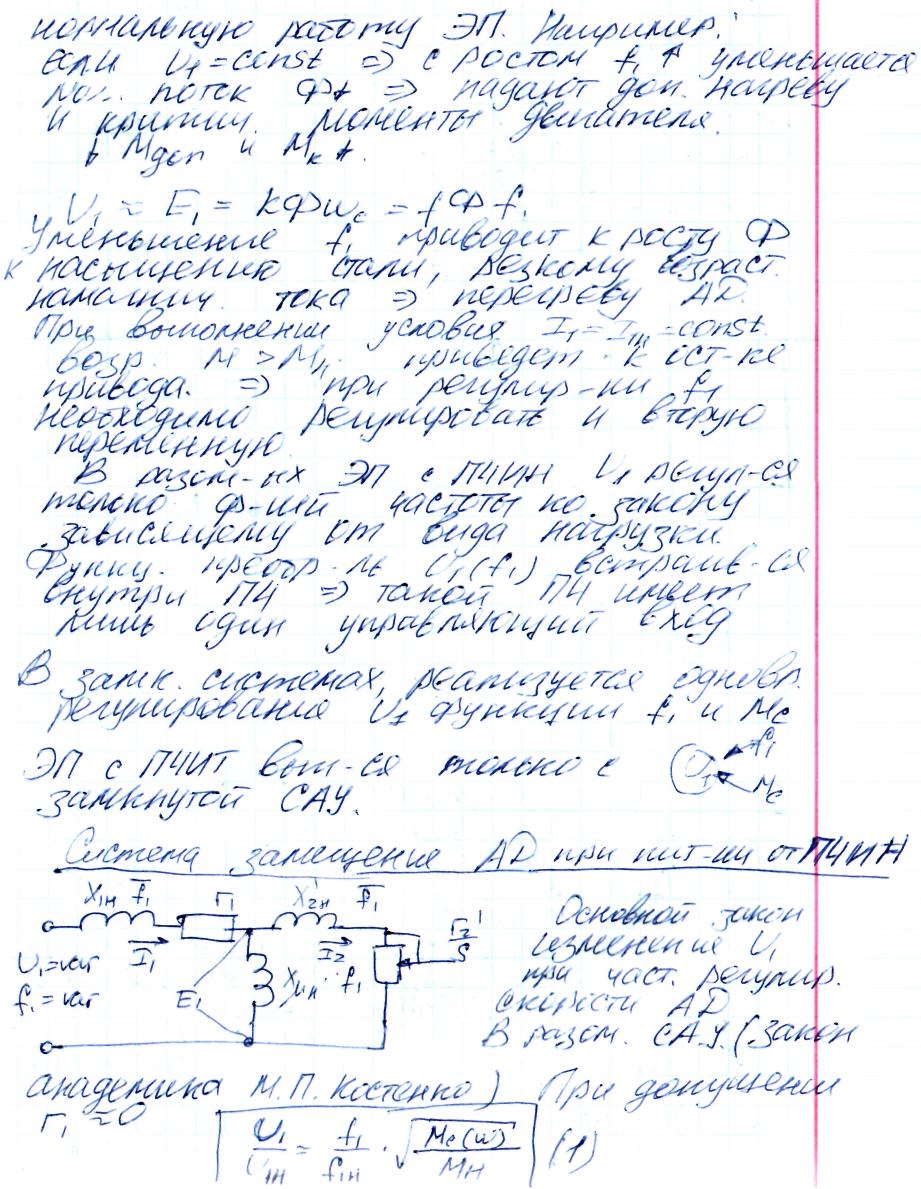
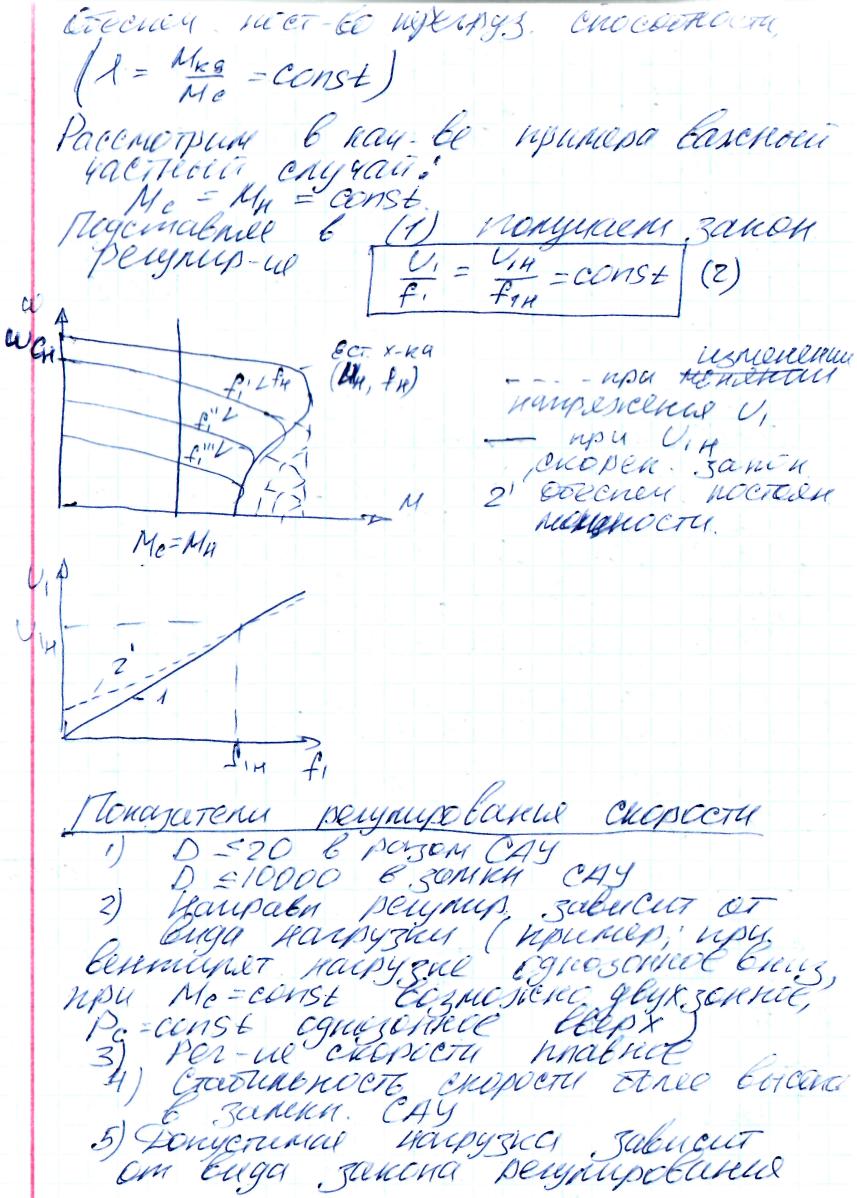
26. Частотное регулирование скорости АД. Схема. Необходимость регулирования второй переменной ПЧ (U или I). Формула М.П.Костенко. Зависимость U1(f1) и механические характеристики для одного из 3-х частных случаев (по выбору). Коррекция закона регулирования с учетом r1.
![]()
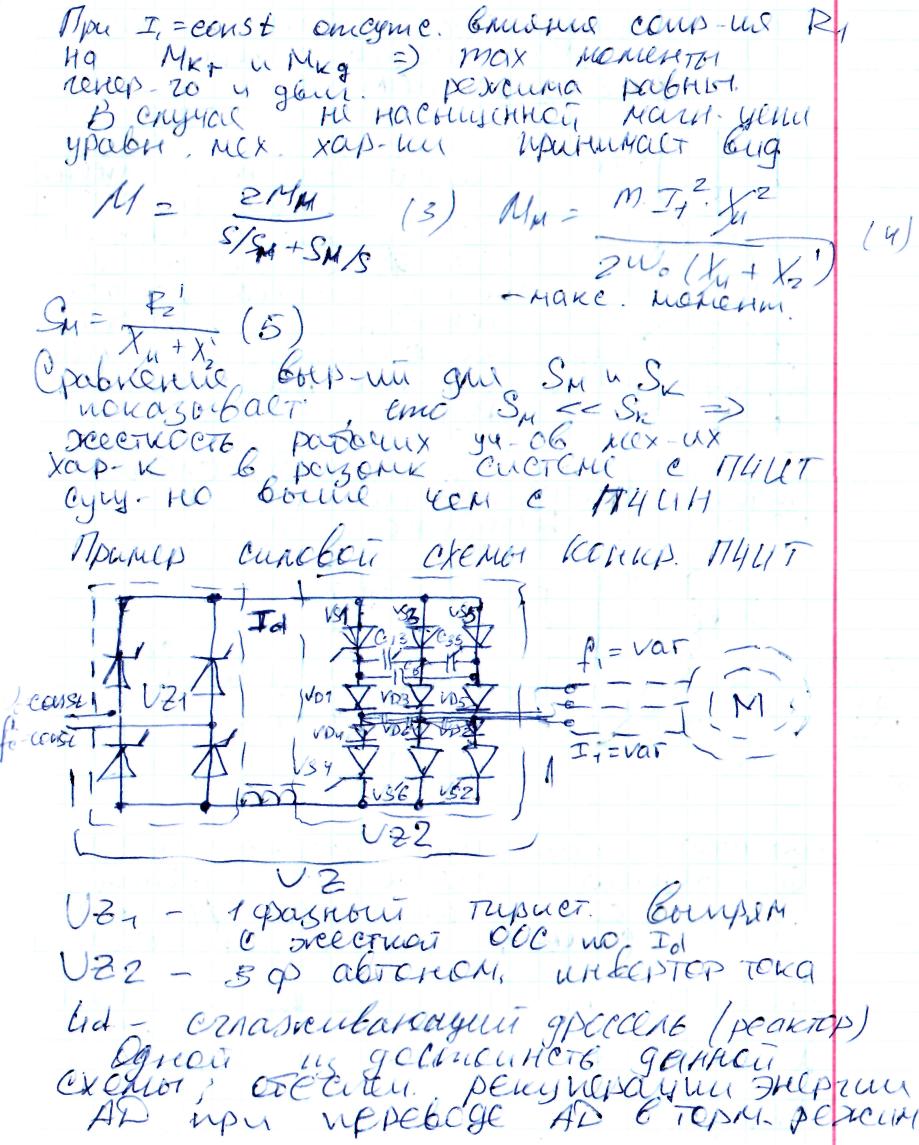
27. Система ПЧИТ-АД. Схема замещения, векторная диаграмма, механические характеристики при ненасыщенной магнитной цепи.

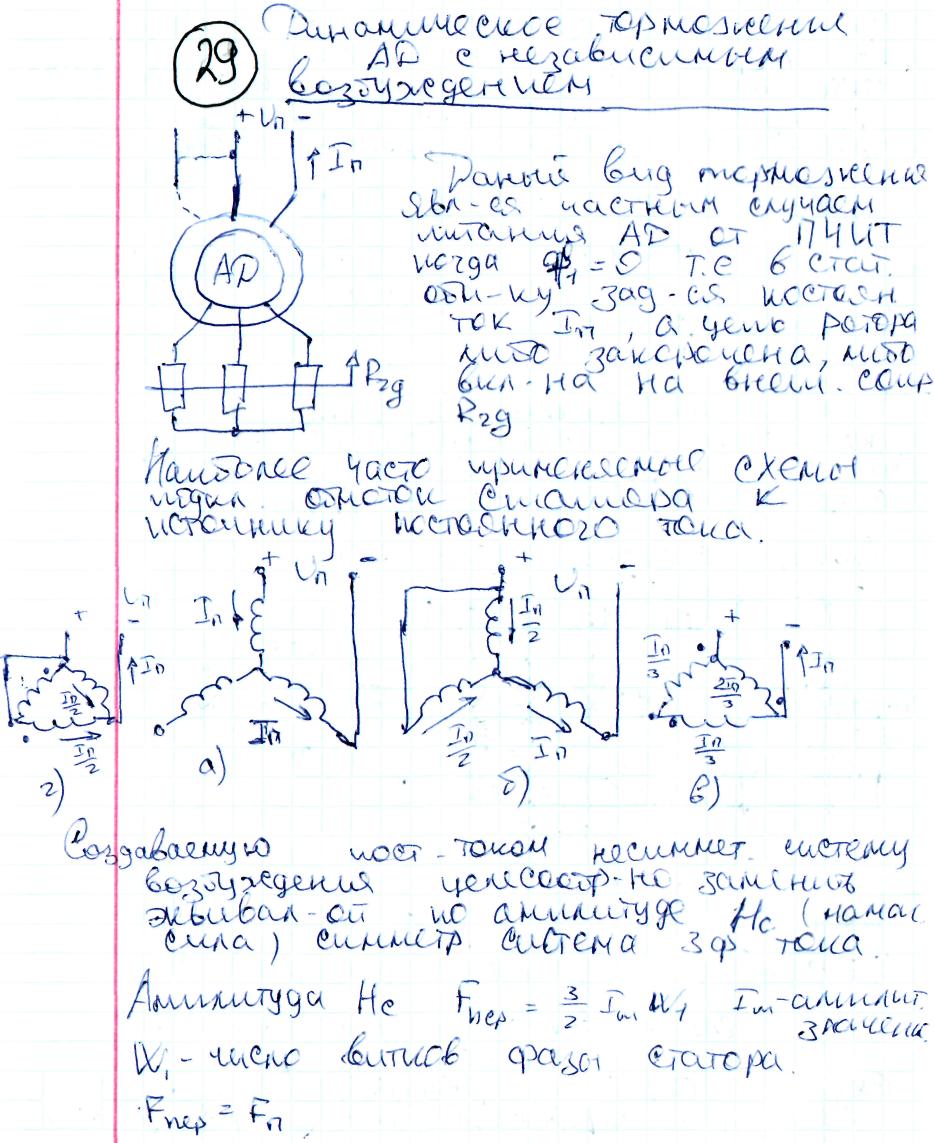
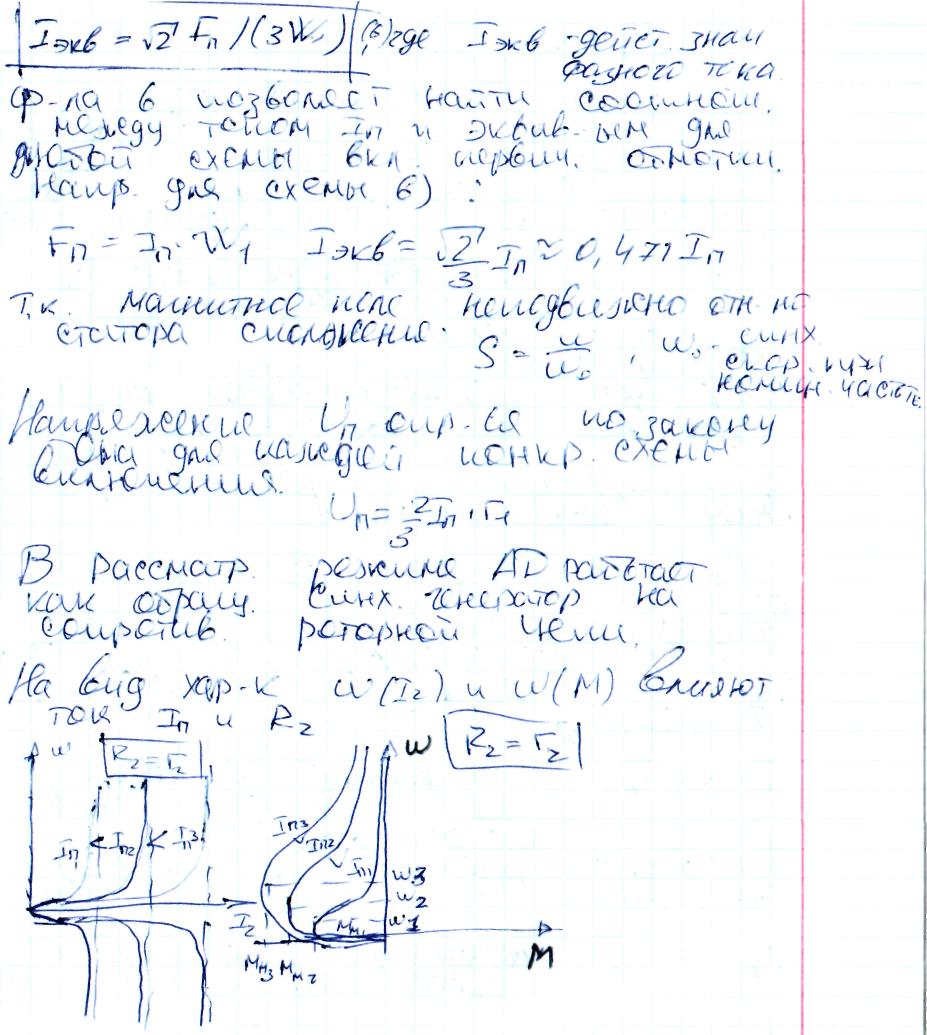
29. Динамическое торможение АД. Принципиальная схема и возможные схемы включения статорной обмотки. Эквивалентный ток и его связь с постоянным током. Характеристики ω(I2) и ω(М).
30. Схема включения, векторная диаграмма, угловая и механическая характеристики СД при питании от сети. Режимы работы.
В электроприводе применяются синхронные двигатели: -с электромагнитным возбуждением и неявнополюсным ротором;
-с электромагнитным возбуждением и явнополюсным ротором; -с возбуждением от постоянных магнитов;
-реактивные,
-шаговые.
В схемах включения синхронных двигателей (рис. 4.57): СД - синхронный двигатель, Т - согласующий трансформатор; УВ - управляемый возбудитель; АБ - аккумуляторная батарея; АИТ - автономный инвертор тока; ГТЧИН - преобразователь частоты со свойствами источника напряжения
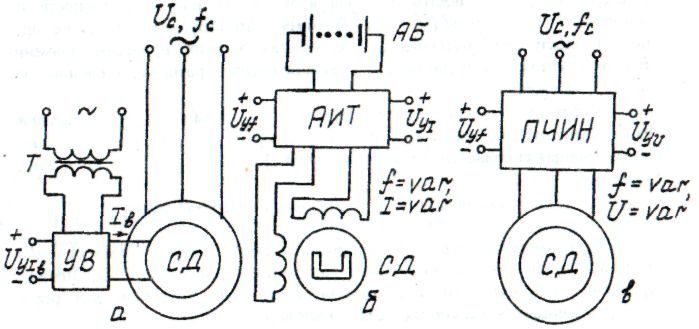
Рис. 4.57. Схемы включения нерегулируемого (а) и регулируемых (б, в) электроприводов с синхронными двигателями
Питание обмотки возбуждения осуществляется от источника постоянного тока через контактные кольца, так как обычно обмотка возбуждения машин с электромагнитным возбуждением располагается в роторе. Вследствие того, что номинальное напряжение возбуждения синхронных двигателей максимальной (или номинальной) скорости двигателя У маломощных двигателей Rф >= 0,02. .0,05. У двигателей средней и большой мощности Rф=0,002...0,02.
Основой для анализа статических характеристик и режимов работы является векторная диаграмма синхронной машины (рис. 4.59). На векторной диаграмме обозначено:
U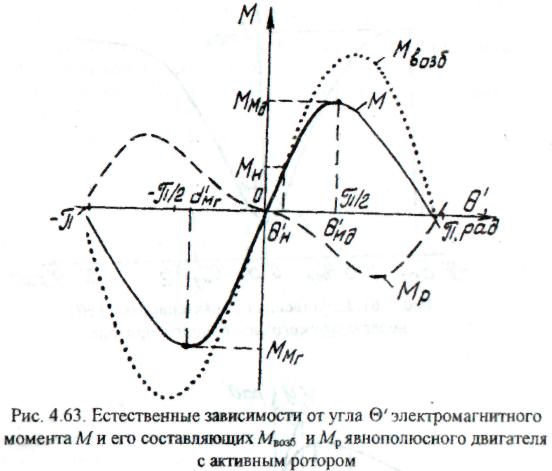 ,
Е0 EЕ - векторы фазных напряжения, ЭДС
холостого хода и результирующей ЭДС;
,
Е0 EЕ - векторы фазных напряжения, ЭДС
холостого хода и результирующей ЭДС;
I, Id, 1q, la, Ip - векторы тока фазы и его составляющих по осям d, q, а также активной и реактивной;
IRф, IdXd, lqXq - падения напряжения на сопротивлениях Rф, Xd и Xq от соответствующих токов;
0', 0E, пси,ф - углы между векторами U и -Е0 (угол нагрузки), ЕE и -Е0, 1 и -Е0, U и I
Векторная диаграмма двигательного режима
возбужденной синхронной машины
при опережающем токе и Ld< Lq
У нерегулируемых синхронных двигателей
Oн = 25...30и, а перегрузочная способность
лям-да = Mмд/Mнv лежит в пределах 2...3.
нерегулируемых синхронных двигателей
Oн = 25...30и, а перегрузочная способность
лям-да = Mмд/Mнv лежит в пределах 2...3.
31. Свойства и характеристики синхронного ЭП с внешней синхронизацией. Влияние на вид угловых характеристик активного сопротивления фазы и синхронных индуктивностей по магнитным осям.
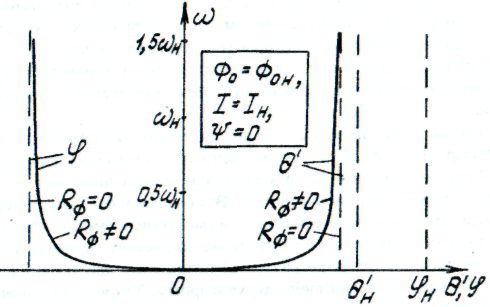
Рассмотрим статические характеристики синхронного привода при постоянстве f, I и Ф0, причем значения указанных переменных примем равными номинальным. В этих условиях углы 0', ф, напряжение U и момент двигателя М являются функциями угла нагрузки 0 при Е0=const. В качестве независимой переменной примем электрический угол Ч*. Систему уравнений (4.114) теперь решаем относительно угла 0' и напряжения U. Получаем
Влияние на уровень статорного напряжения двигателя не только угла пси, но и уровня возбуждения показано на рис. 4.73, причем зависимость U(пси) невозбужденной (Ф0 = 0) машины изображена в пренебрежении потоком остаточного магнетизма. Для сравнения штриховой линией изображен уровень номинальногонапряжения.
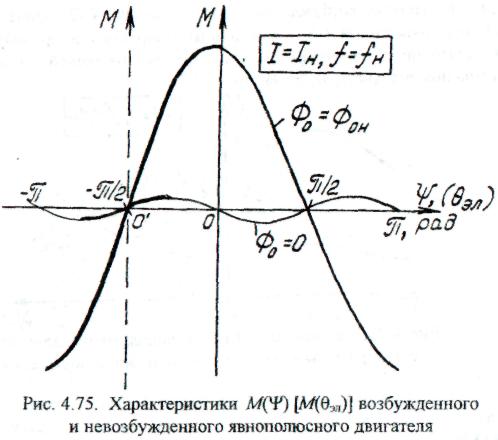
Участки устойчивой работы привода при изменении момента нагрузки от -Мм до +ММ выделены на характеристиках (рис. 4.73-4.75) толстыми линиями. Нулю электрического угла нагрузки 0эл соответствует угол пси = -п/2 рад. Ось моментов, соответствующая углу 0эл =0 (рис. 4.75), показана штриховой линией.
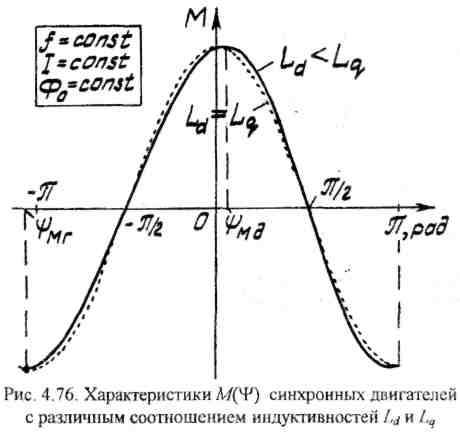
Характеристика Mпси) двигателя с активным ротором и одинаковой синхронной индуктивностью по магнитным осям (пунктирная кривая на рис. 4.76) согласно (4.111) представляет собой косинусоиду У такого двигателя зона устойчивой работы по углу пси(-п < пси < 0) больше, чем у возбужденного явнополюсного двигателя.
32. Свойства и характеристики синхронного ЭП с внутренней синхронизацией. Схема. Влияние параметров гф, Ld, Lq на вид механических и электромеханических характеристик. Структурная схема регулируемого ЭП как источника скорости на базе ВД.
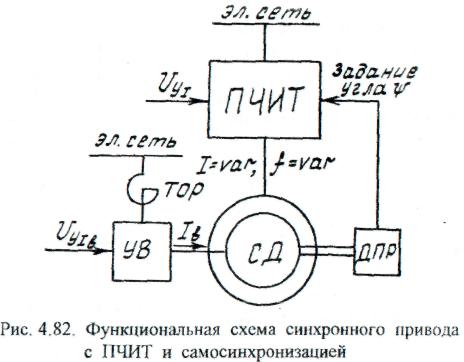
Пусть
система управления приводом фиксирует
угол пси (рис. 4.82). При постоянстве токов
рабочей обмотки двигателя I
и тока возбуждения Iв
уравнения (4.124) и (4.125) можно записать
так:

Где
![]()
В
случае Rф = О из (4.130) имеем
![]() и из (4.131) получаем
и из (4.131) получаем![]() .
Минимум напряжения на статоре двигателя
(w = 0) при Rф
не=0составляет падение напряжения RфI,
а при Rф = 0 он равен нулю (рис. 4.83).
.
Минимум напряжения на статоре двигателя
(w = 0) при Rф
не=0составляет падение напряжения RфI,
а при Rф = 0 он равен нулю (рис. 4.83).
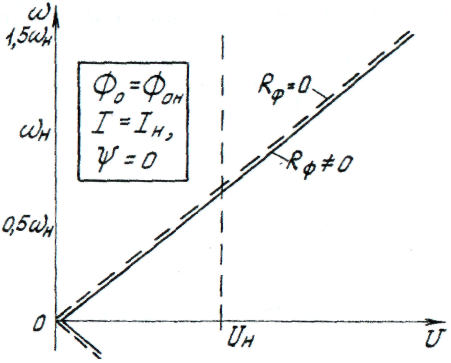
Электромеханические характеристики синхронного привода с внутренней синхронизацией
В случае Rф не=0 при снижении скорости происходит уменьшение угла (тэта штрих) и увеличение коэффициента мощности двигателя, работающего с отстающим током (рис. 4.84). Штриховыми линиями (рис 4.84) обозначены номинальные углы (тэта штрих) и фн при работе двигателя на естественной характеристике.
Зависимости 0'(w) и ф(w) синхронного привода с самосинхронизацией
Из (4.110) следует, что при постоянных значениях с0, I и пси момент привода не зависит от скорости (рис. 4.85), т.е. в данных условиях синхронный привод приобретает свойства идеального регулируемого источника момента.
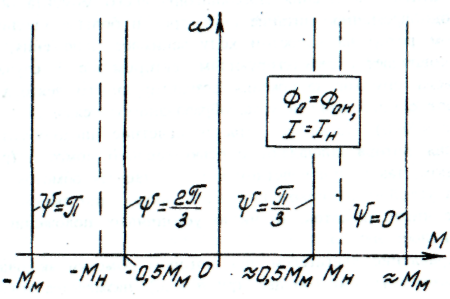
Рис. 4.85. Механические характеристики синхронного привода с самосинхронизацией
33. Механические переходные процессы ЭП с линейной характеристикой Mдин(ω): а) пуск, б) реверс с реактивным Мс. Фазовые траектории и зависимости Mдин(t) и ω(t).

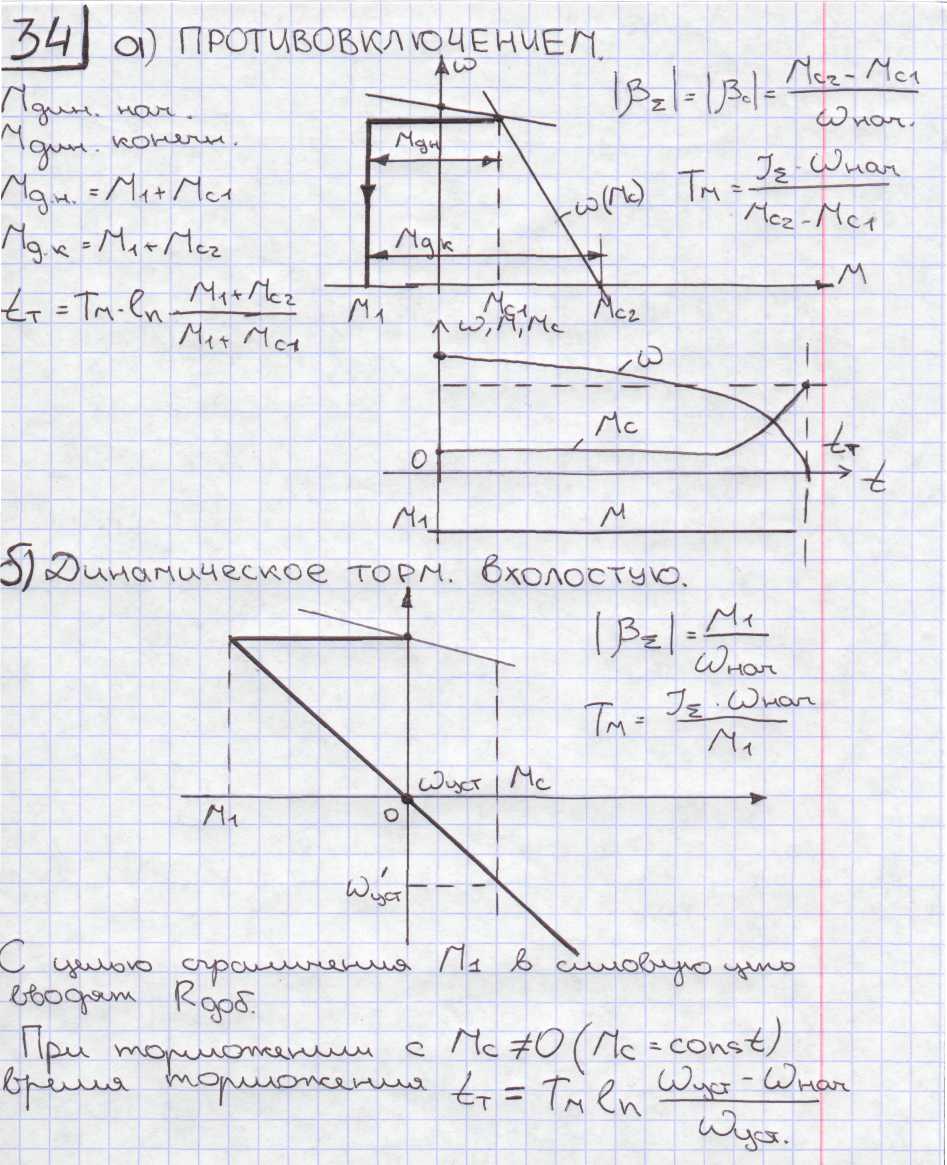
34. Механические переходные процессы ЭП с линейной характеристикой Мдин(ω): а) торможение противовключением, б) динамическое торможение. Фазовые траектории и зависимости Mдин(t) и ω(t).
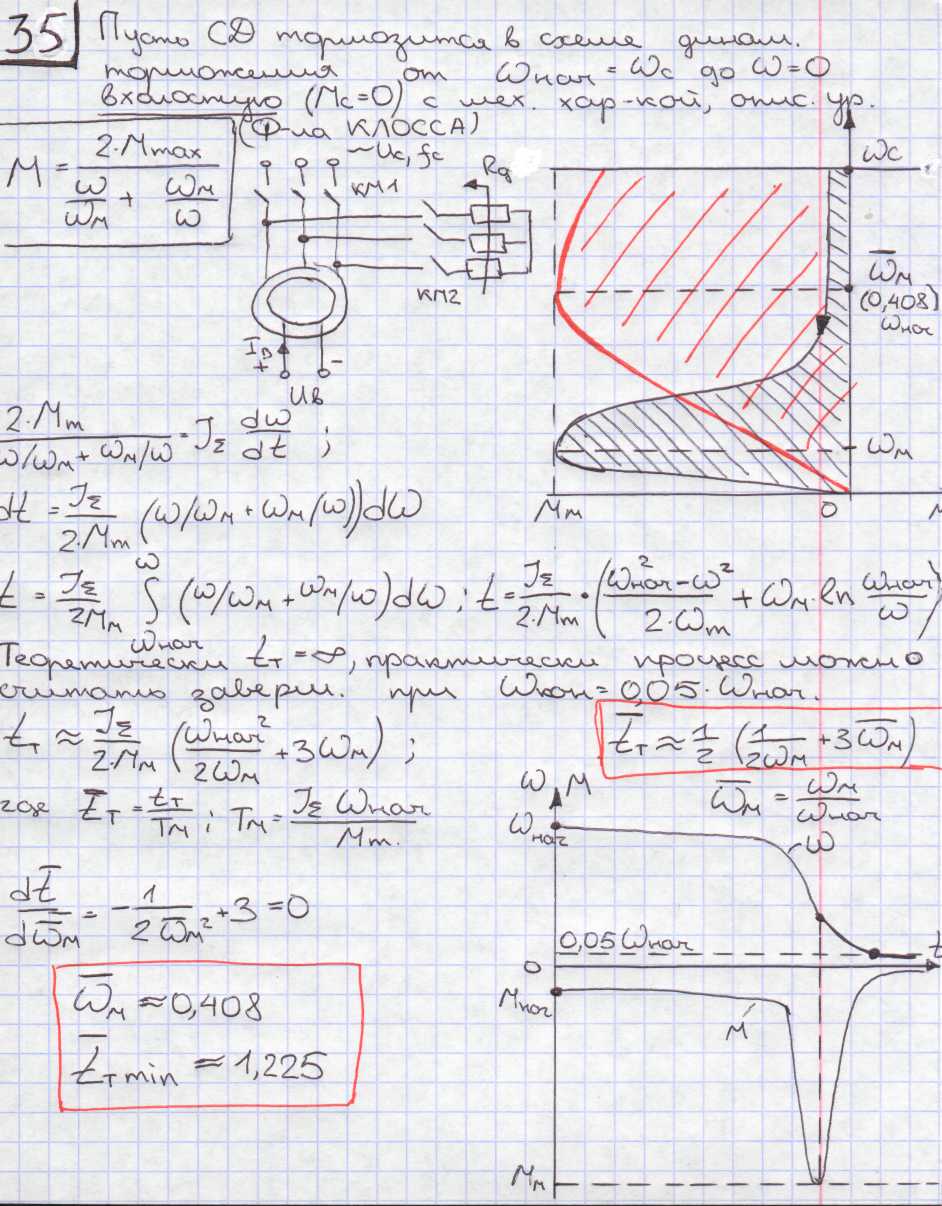
35. Аналитический расчет зависимостей M(t) и ω(t) при динамическом торможении СД вхолостую. Определение минимального времени торможения.
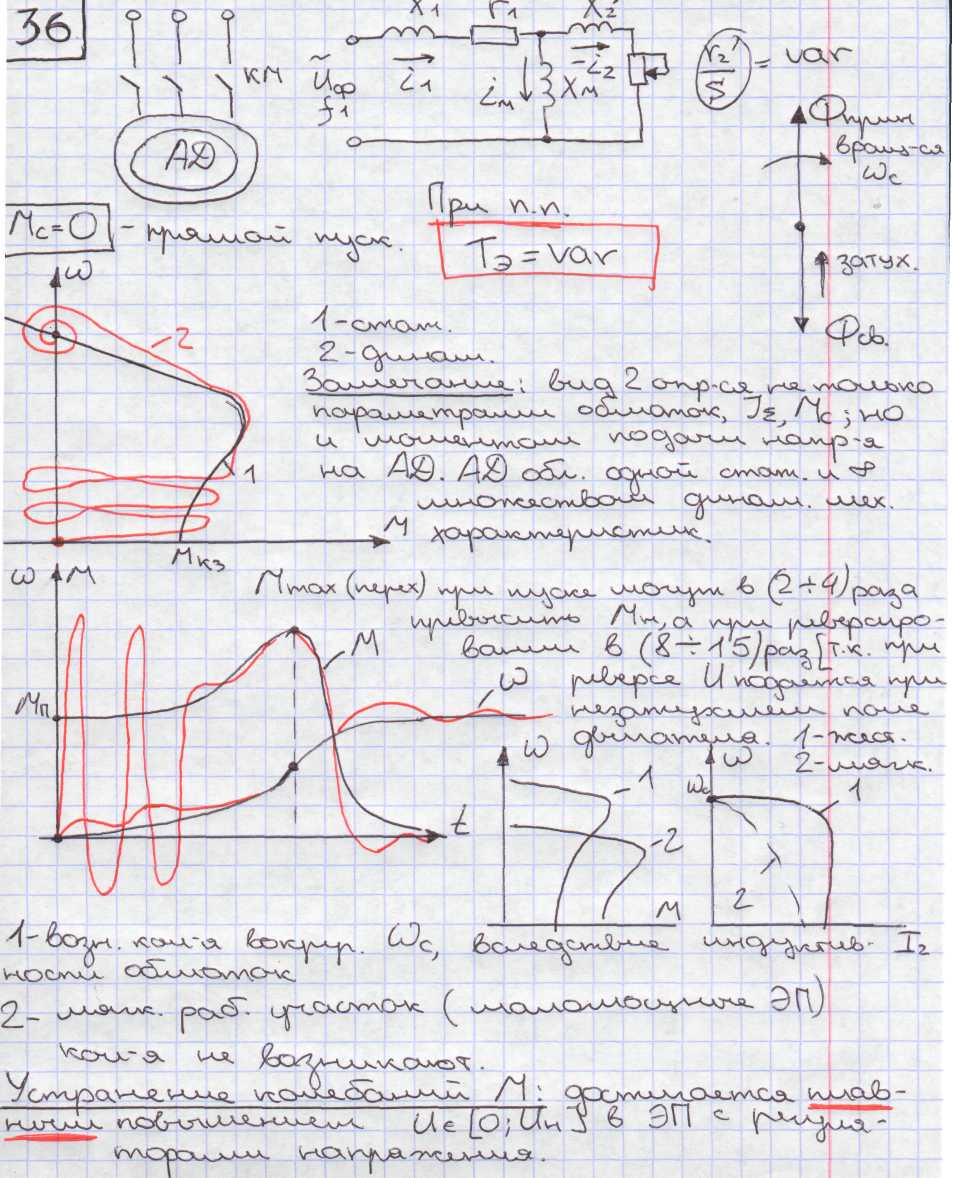
36. Электромеханические переходные процессы в ЭП с АД при скачке напряжения на статоре. Примеры фазовой траектории и кривых ω(t) и M(t) при пуске вхолостую. Средство борьбы с колебаниями электромагнитного момента.
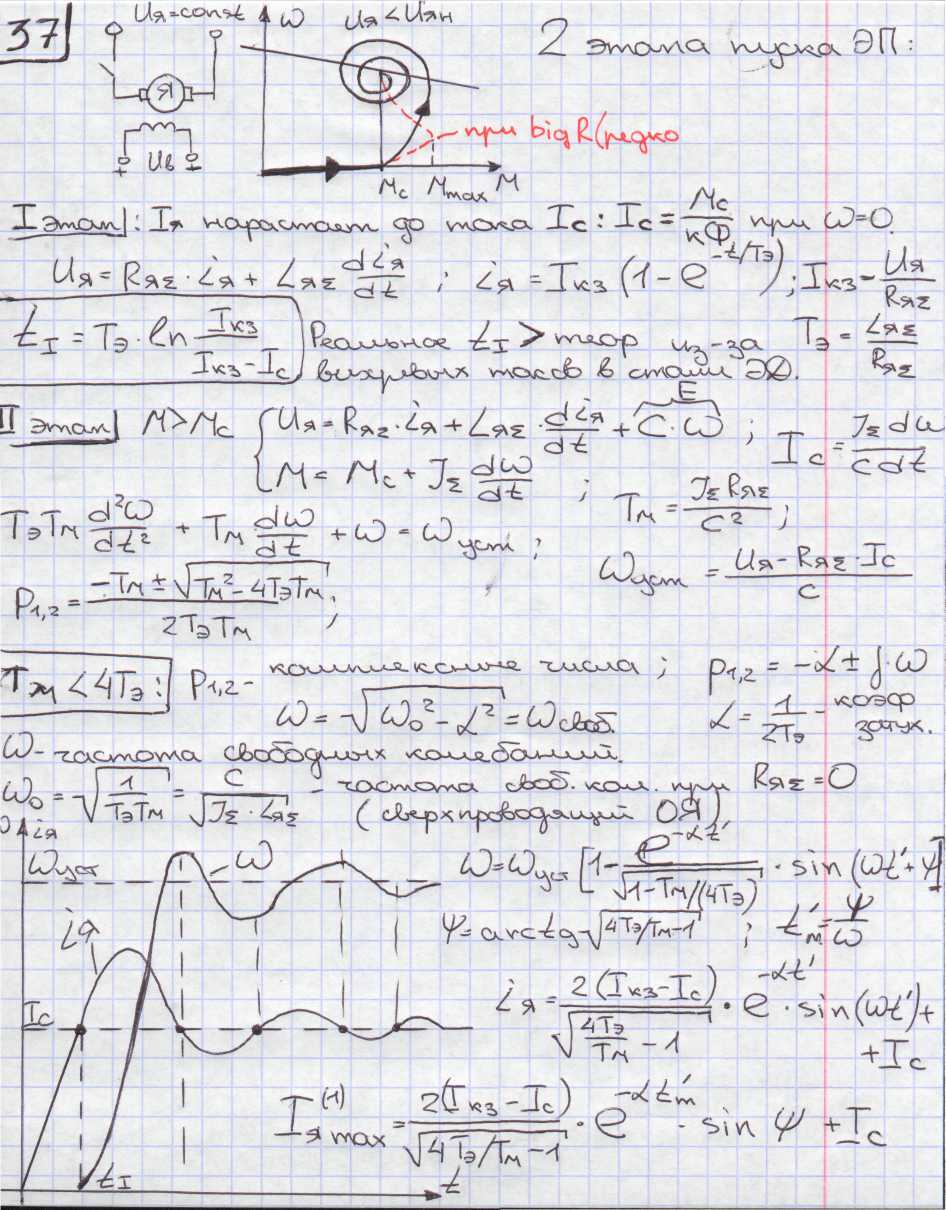
37. Электромеханический переходный процесс пуска ЭП с ДПТНВ и реактивной нагрузкой путем скачка напряжения на якоре (случай Тм < 4Тэ). Фазовая траектория, математическое описание, кривые M(t) и ω(t).
38. Переходный процесс, обусловленный введением Rдоб в цепь ОВ ДПТНВ при Мс = const: схема, математическое описание, фазовые траектории и зависимости Ф(t), ω(t), M(t) и iя(t).


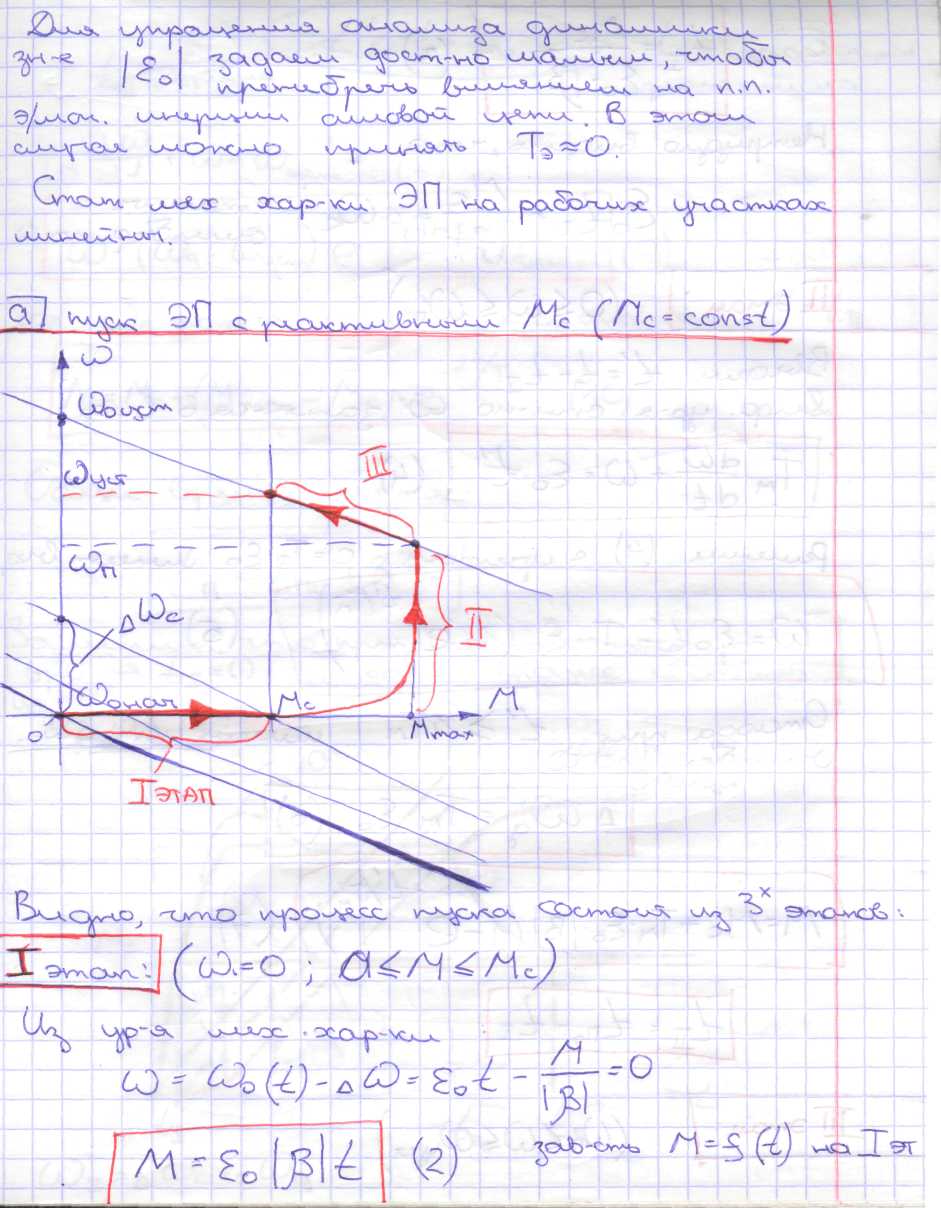
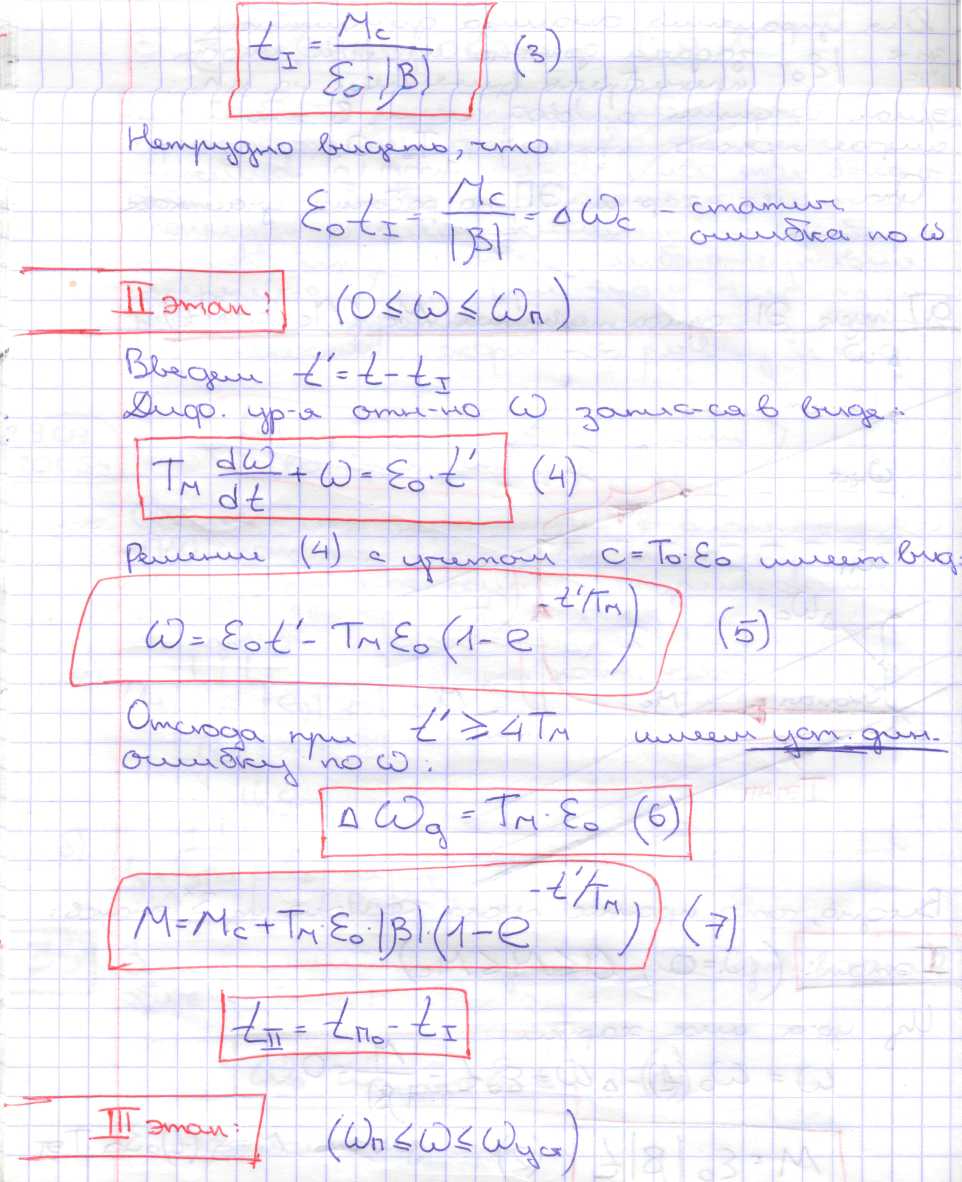
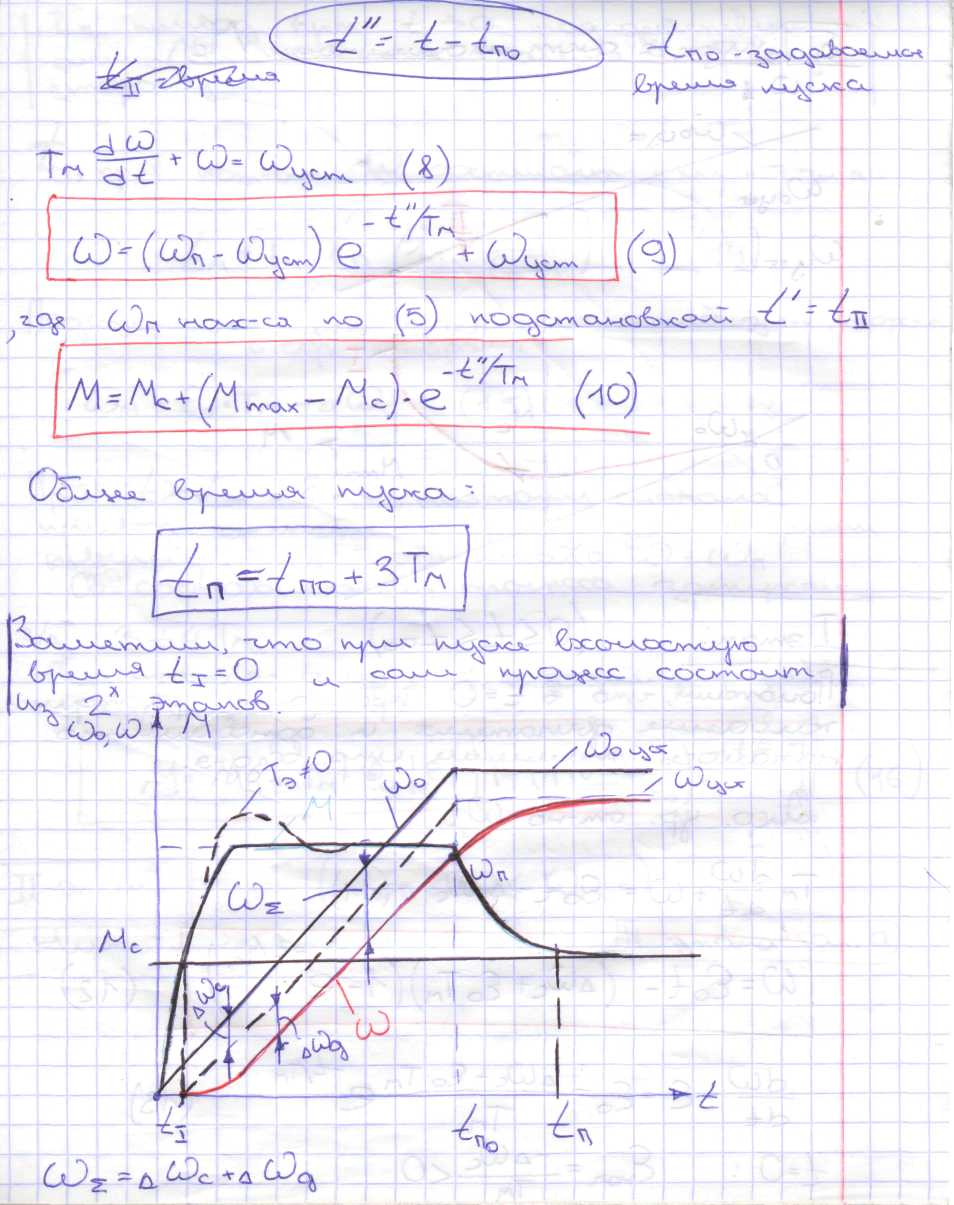
39. Пуск ЭП с линейной механической характеристикой и реактивным Мс путем линейного во времени увеличения ω0. Фазовая траектория и кривые ω 0(t), ω(t), M(t). Статическая и динамическая ошибки по скорости.
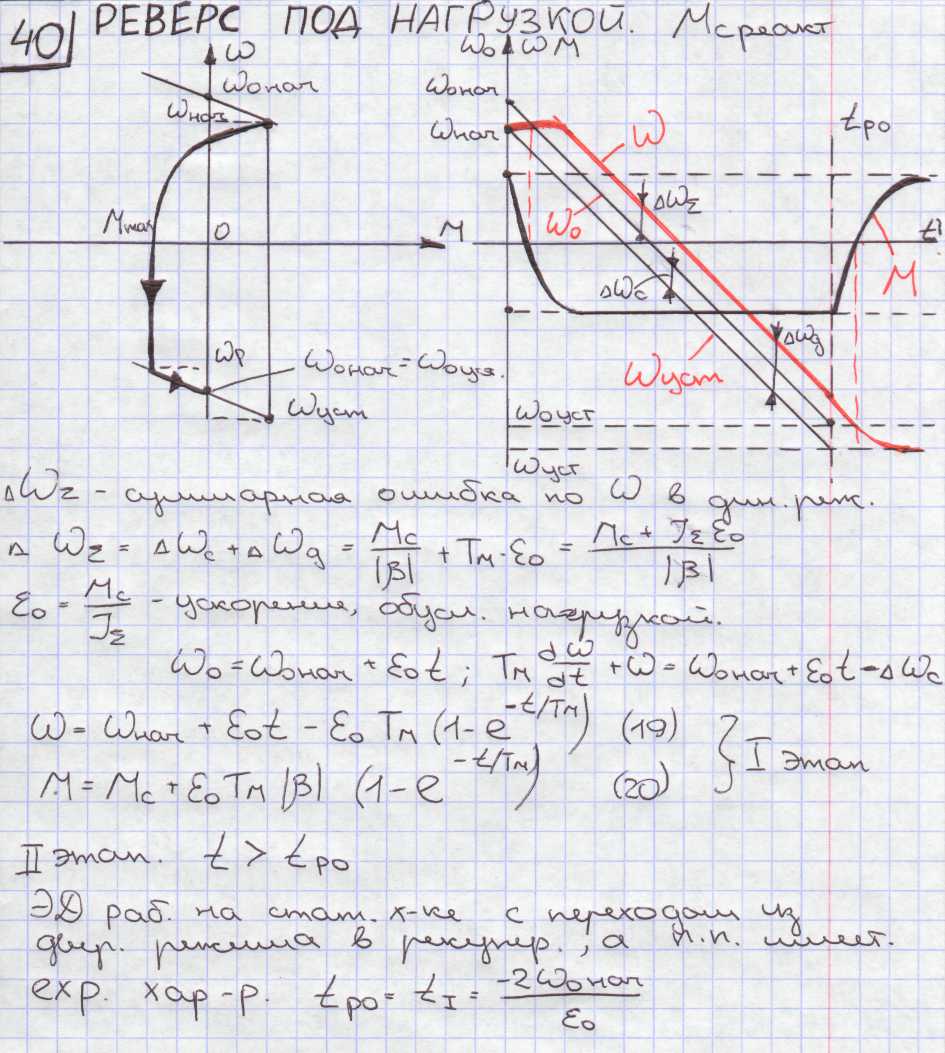
40. Реверсирование ЭП с линейной механической характеристикой и одномассовой МЧ путем линейного во времени изменения управляющего воздействия при реактивном Мс. Фазовая траектория и кривые ω 0(t), ω(t), M(t). Суммарная ошибка по скорости и ее составляющие.
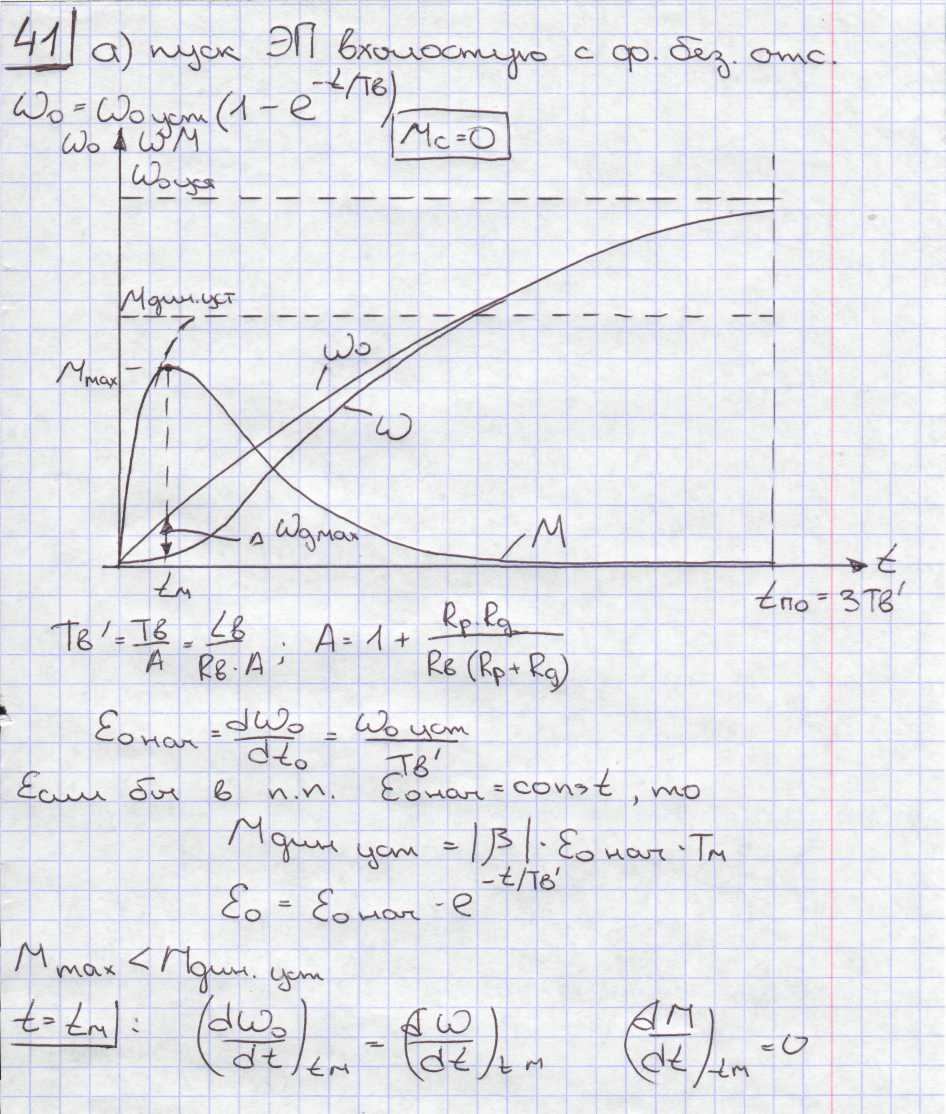
41. Переходные процессы при экспоненциальной зависимости от времени управляющего воздействия. Назначение и виды форсировки возбуждения электрических машин.