

12. Координатные преобразования уравнений механической характеристики обобщенной машины.
Рассмотрим преобразования при переходе от физических переменных в системах координат α,β (статора) и d,q (ротора) к расчетным переменным в системе координат и,v, вращающейся относительно неподвижного статора с произвольной скоростью ωк. Каждую реальную обмоточную переменную (напряжение, ток, потокосцепление) представим вектором, направленным вдоль соответствующей данной обмотке оси координат, модуль которого меняется во времени в соответствии с изменениями изображаемой переменной.
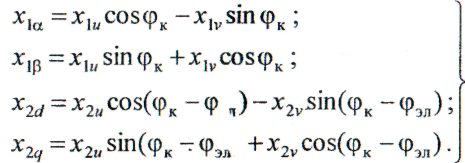
Взаимное положение на рассматриваемый момент времени систем ортогональных координат α,β (статора), d,q (ротора) и произвольной и,v, a также результирующих векторов обмоточных переменных статора x1, ротора x2 и их проекций на соответствующие оси показано на рис. Приняв заданными действительные переменные в осях α,β и d,q, можно найти соответствующие им новые переменные в осях и,v в виде суммы проекций действительных переменных на новые оси.
Для большей наглядности графические построения выполнены отдельно для статора (рис.а) и ротора (рис.б) Просуммировав проекции векторов x1α и х1β на оси и и v (рис.а), получаем формулы прямого преобразования переменных статора
![]() *
*
Оси и,v (рис.б) смещены относительно роторных осей d,q на угол φК-φЭЛ и совпадают с осями и,v (рис.а). Следовательно, формулы прямого преобразования роторных переменных имеют вид
![]() **
**
Из * и ** можно получить формулы обратного преобразования, т. е. перехода от преобразованных переменных в осях и,v к реальным переменным обобщенной машины:
 ***
***
Рис. Переменные обобщенной машины в различных системах координат
Формулы прямого *, ** и обратного *** преобразования координат находят практическое применение при разработке управляющих вычислительных устройств в регулируемых электроприводах переменного тока и при выполнении теоретических исследований этих приводов.
13. Фазные преобразования переменных.
Математическое описание динамической механической характеристики получено для двухфазной модели машины. Обмотка статора большинства двигателей переменного тока чаще всего выполняется трехфазной, поэтому имеется необходимость преобразования переменных трехфазной машины к переменным обобщенной машины и наоборот. Основой для преобразования служит то обстоятельство, что один и тот же результирующий вектор МДС может быть создан как двухфазной, так и многофазной (в частном случае трехфазной) обмоткой.
Пусть задана несимметричная система реальных переменных xlа, x1b, х1с статора трехфазной машины. На основании построения в предположении, что преобразованные переменные пропорциональны сумме проекций переменных xlа, x1b, х1с на оси α,β, имеем
 *
*
где кс - коэффициент пропорциональности, получаемый из условия инвариантности мощности.
На практике система переменных трехфазной машины обычно является симметричной, т. е. подчиняющейся условию
![]() **
**
С учетом ** уравнения * принимают вид
 ***
***
Переменные х2d, х2q роторной цепи также определяются по * и ** при соответствующей замене индексов.
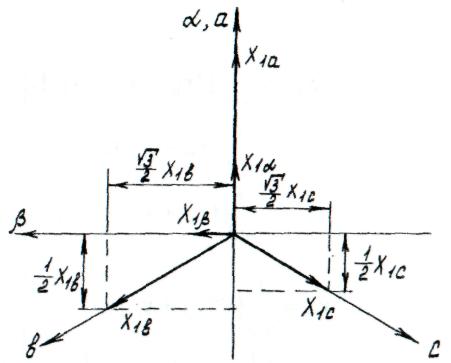
Рис. Схема преобразования переменных трехфазной машины к переменным двухфазной модели
Токи нулевой последовательности не влияют на момент двигателя, поэтому влияние переменных нулевой последовательности на динамику электромеханических систем чаще всего не учитывается.