

11. Электромеханическое преобразование энергии. Обобщенная электрическая машина. Учет явнополюсности. Системы координат. Характеристики электромеханической связи.

В функциональной схеме электромеханической системы электромеханический преобразователь ЭМТ является звеном, связывающим электрическую и механическую части энергетического канала и осуществляющим электромеханическое преобразование энергии. От его свойств зависят оптимальные законы управления и энергетические показатели электропривода.
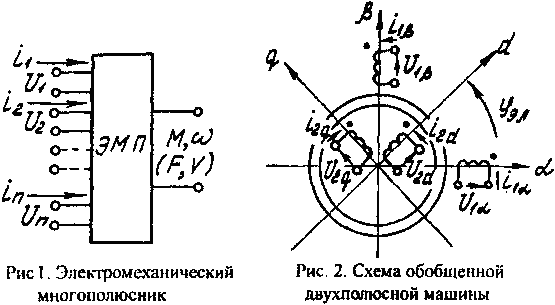
Электромеханический преобразователь - это идеальный двигатель без механических потерь, ротор которого не имеет механической инерции и жестко связан с реальным ротором. ЭМП может быть представлен в виде электромеханического многополюсника (рис1), имеющего n пар электрических выводов от n обмоток двигателя и одну пару механических выводов, на которых в результате электромеханического преобразования энергии при скорости ω (или V) развивается электромагнитный момент М двигателя (или электромагнитная сила F).
Приложенные к обмоткам напряжения u1, u2,..., un или задаваемые в обмотки токи i1, i2,.., in связывают ЭМП с системой управления электроприводом. Механические переменные ω и М (или V и F) связывают ЭМП с МЧ в единую взаимодействующую систему.
Подавляющее большинство двигателей - это многофазные электрические машины. Поэтому, когда это возможно, анализ процессов в многофазной машине сводят к анализу тех же процессов в эквивалентной двухфазной модели этой машины. Идеализированный двухфазный электромеханический преобразователь называется обобщенной электрической машиной.
Любая электрическая машина с m - фазной обмоткой статора и n - фазной обмоткой ротора может быть представлена двухфазной моделью, если выполняется условие равенства полных сопротивлений фаз статора (ротора).
В реальной машине обмотки уложены в пазах статора и ротора, что вызывает несинусоидальность МДС обмоток и неравномерность воздушного зазора. В обобщенной машине расположенные в пазах проводники с током заменены синусоидальными токовыми слоями, эквивалентными по МДС первым гармоникам МДС соответствующих реальных обмоток, зазор принят равномерным, а магнитная цепь не насыщена. Влияние явнополюсности машины при равномерном зазоре учитывается введением переменной радиальной магнитной проницаемости:
![]()
φэл=pпφ и φ - соответственно электрический и геометрический углы поворота ротора относительно статора.
Полные сопротивления фаз статора (ротора) обобщенной машины равны. Напряжения (токи) обмоток могут быть несимметричными, при этом для анализа используют метод симметричных составляющих.
При математическом описании процессов электромеханического преобразования энергии нашли наибольшее применение четыре системы координат:
1) х, у - вращающаяся с синхронной скоростью поля машины;
2) α, β - жестко связанная с неподвижным статором;
3) d, q - жестко связанная с ротором;
4) и, v - вращающаяся с произвольной скоростью.
Преобразования электрического равновесия для обмоток статора записывать в осях координат α, β, а для обмоток ротора - в осях координат d, q. Этим системам координат соответствует схема на рис.2 и уравнения Кирхгофа, выраженные через потокосцепления:

В обобщенной форме:
![]()
Уравнения записаны для реальных напряжений, токов и параметров обобщенной машины. В них R1 и R2 - активное сопротивление соответственно фазы статора и ротора.
У явнополюсной машины собственные и взаимные индуктивности представляются суммой двух составляющих, одна из которых пропорциональна μ, а вторая - Δμ. Составляющие, пропорциональные μ, не отличаются от неявнополюсной машины. Вторые составляющие проходят полный цикл изменения при повороте ротора на одно полюсное деление. Собственные индуктивности явнополюсного статора не зависят от положения гладкого ротора, а собственные индуктивности ротора изменяются в соответствии с изменениями Δμ. Явнополюсный статор при вращении ротора меняет картину поля в зазоре, поэтому взаимная индуктивность обмоток ротора не равна нулю, а определяется изменениями Δμ. В соответствии с изложенным индуктивности обобщенной явнополюсной машины записываются в виде

Уравнение электрического равновесия:
![]() *
*
Электромагнитный момент машины через токи обмоток
![]() **
**
Характеристики электромеханической связи электропривода.
Уравнения * и ** образуют систему из пяти уравнений, устанавливающую взаимосвязь между процессами в электрической (ЭЭЧ) и механической частях электромеханической системы. Эта взаимосвязь получила название "электромеханическая связь".
Учитывая, что р = d/dt, а индуктивности Li,j являются функциями угла φэл, уравнения * после дифференцирования принимают вид
![]() ***
***
где ω = dφ/dt - угловая скорость ротора.
Первое слагаемое правой части уравнения - это падение напряжения ΔuRi на активном сопротивлении цепи данной обмотки, второе - результирующая ЭДС самоиндукции и взаимоиндукции eLi, обусловленная изменениями токов в обмотках, а третье - результирующая ЭДС вращения ei.
Из-за наличия ЭДС еi зависящих от скорости ротора, изменения его скорости при питании обмоток двигателя от источников напряжения вызывают изменения токов в обмотках, а при питании от источников тока - изменение напряжений на обмотках. Электромеханические w(ii) или w(ui) и механические w(М) характеристики служат количественными характеристиками электромеханической связи.
Уравнения ** и *** определяют математическую связь между функциями ii(t) (питание от источника напряжения) или ui(t) (питание от источника тока) и ω(t) в динамических процессах электромеханического преобразования энергии. Следовательно, они являются уравнениями электромеханических характеристик двигателя.