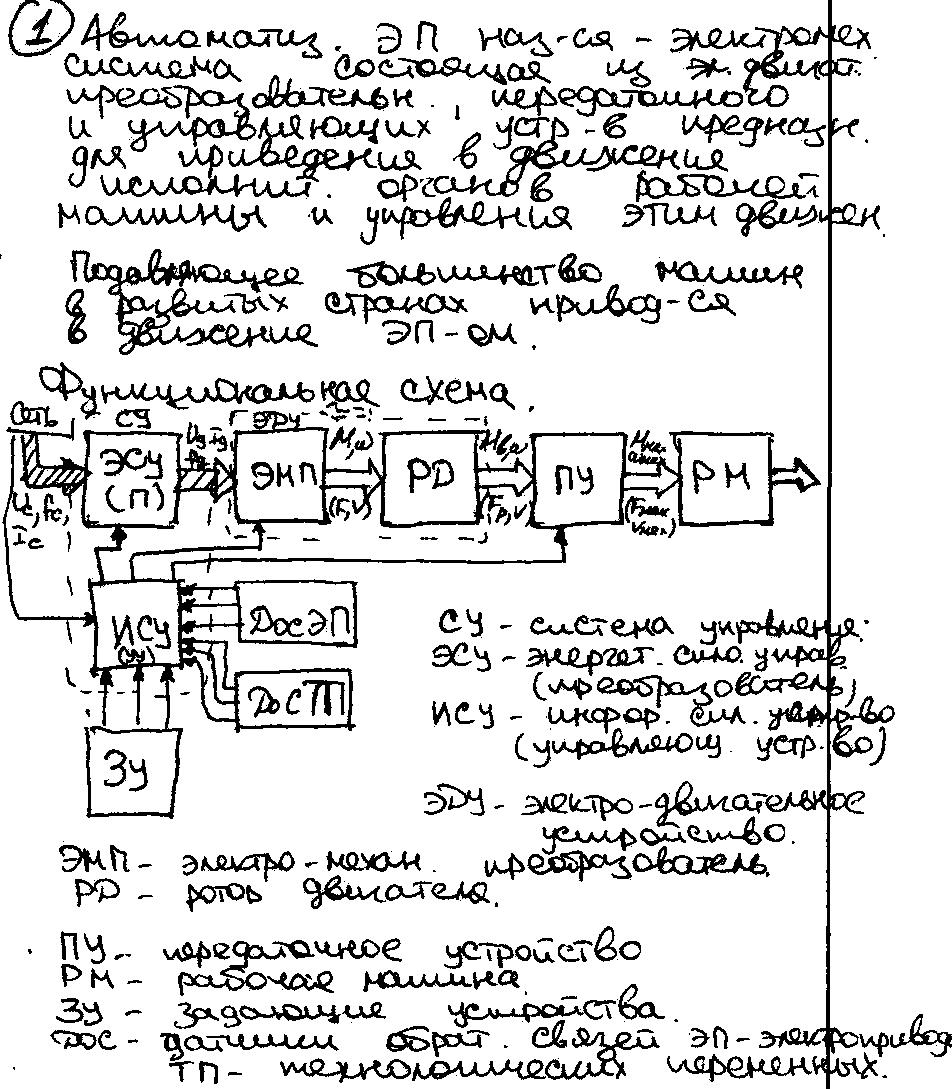
1. Определение понятия «электропривод» (ЭП). Функциональная схема ЭП в наиболее развитом виде. Назначение элементов схемы.

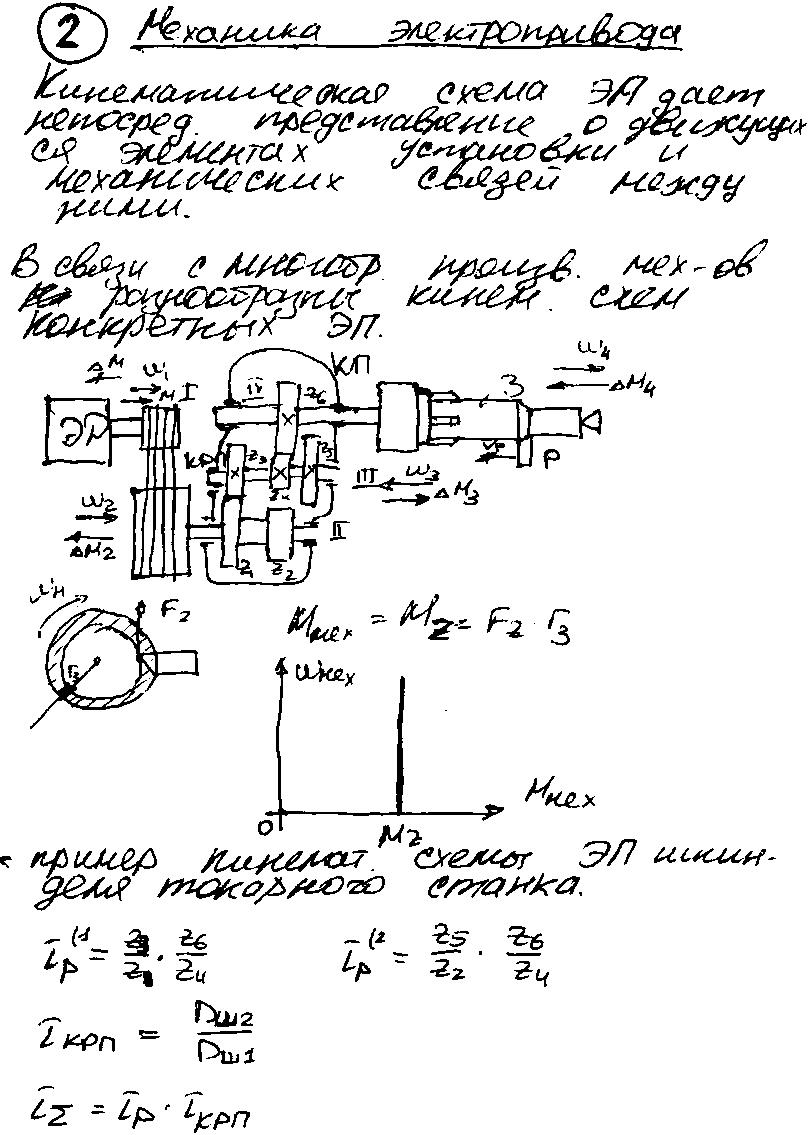
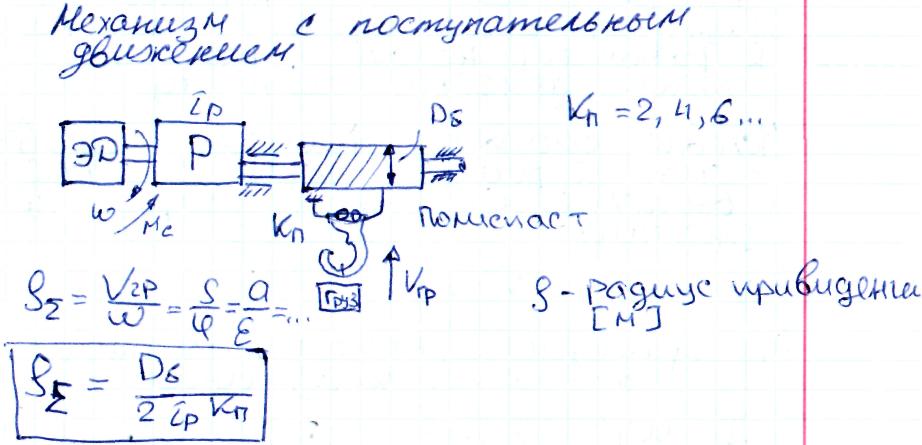
2. Кинематические схемы ЭП. Пример конкретной кинематической схемы. Суммарные передаточное число и радиус приведения. Расчетная механическая схема и ее отличие от кинематической.
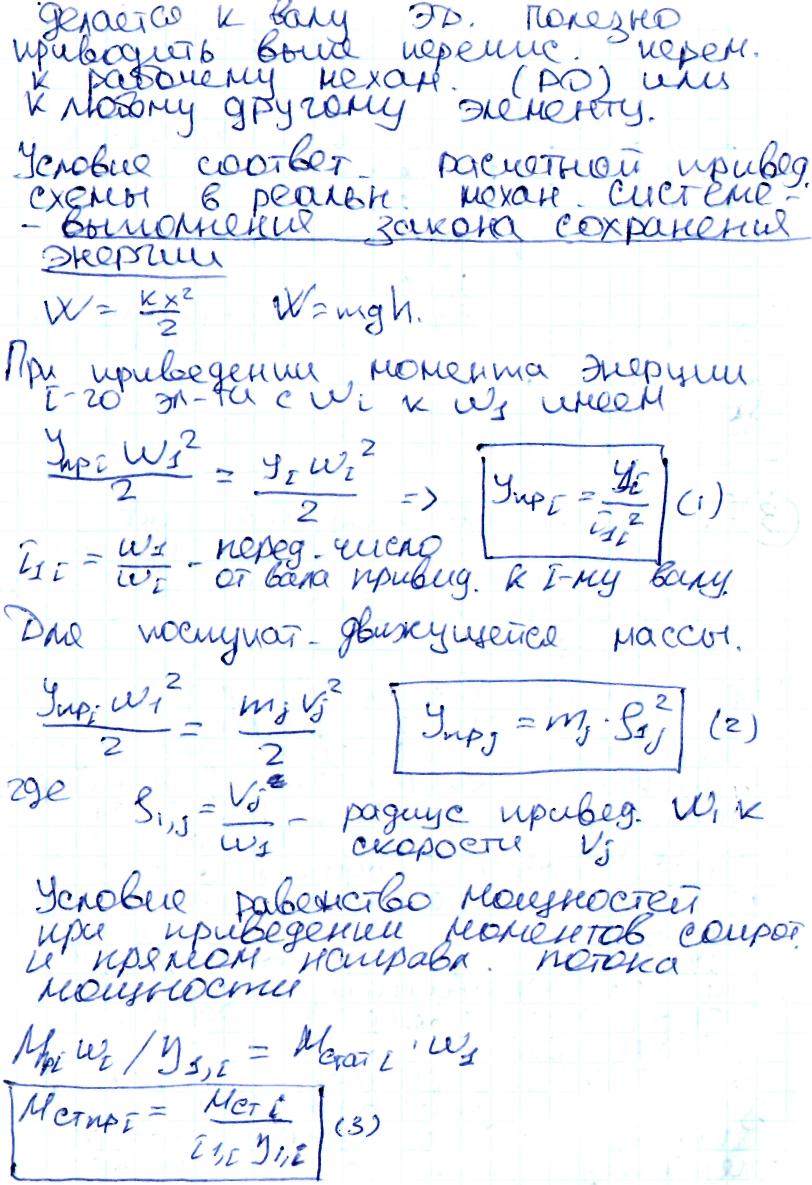
3. Приведение к выбранному элементу кинематической схемы масс, моментов инерции, сил и моментов сил, угловых и линейных перемещений, жесткостей упругих связей остальных элементов. Суммарные момент инерции и момент сопротивления ЭП. Результирующая жесткость связи между основными массами.
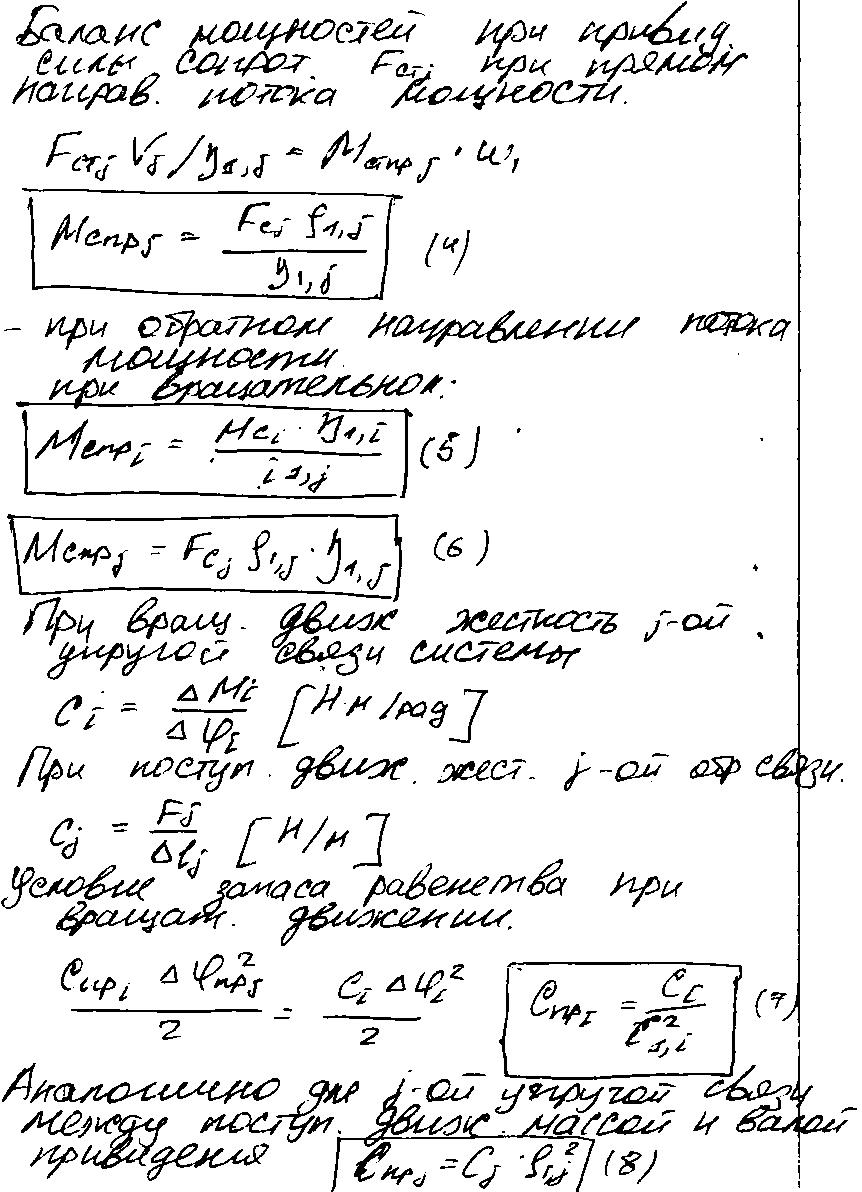

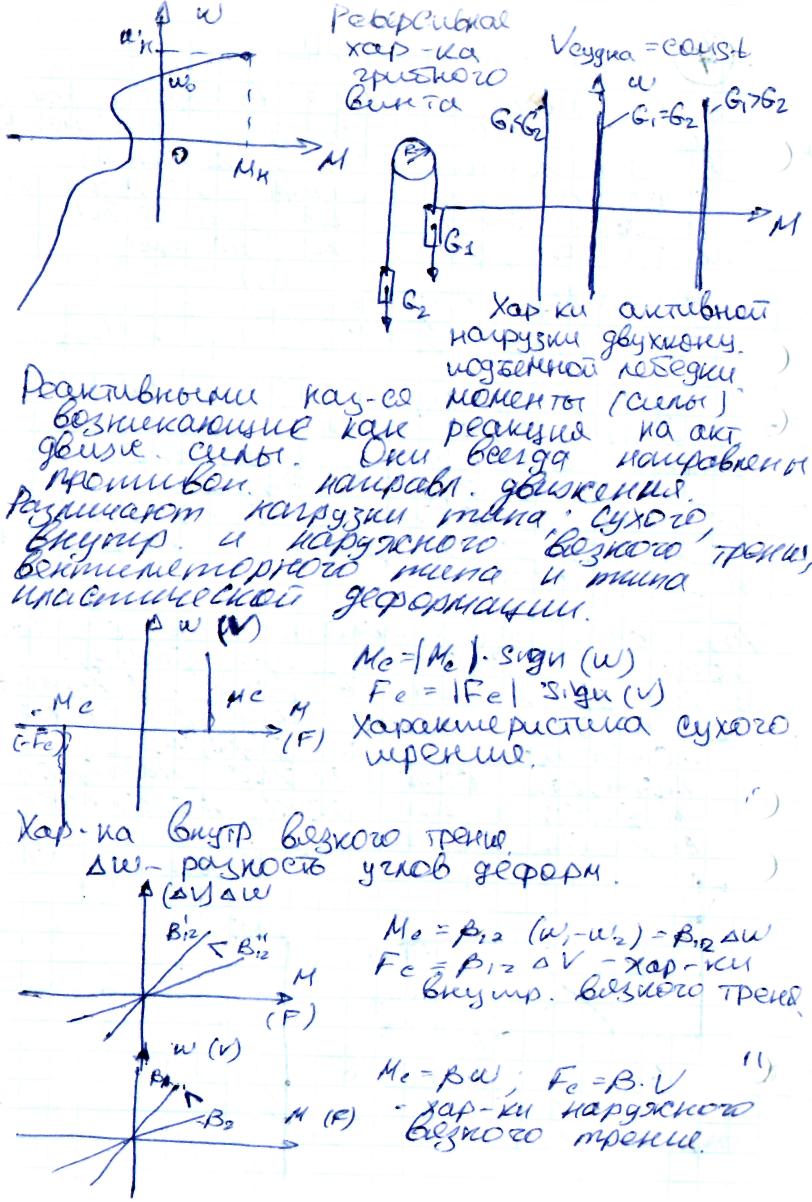
4. Виды ЭП по направлению и характеру движения РО. Активные и реактивные нагрузки: определения, классификация и характеристики. Консервативные силы и моменты сил.


5. Группы рабочих машин. Механические характеристики машин, момент которых является функцией скорости.
I. Рабочие машины, нагрузка которых не зависит от скорости РО (n=0) (подъемные краны, лифты, бумагоделательные машины).
II. Механизмы нагрузка, которых является функцией скорости РО:
а) n=1 (механизмы, нагрузка которых обусловлена силами и моментами жидкостного трения, генераторы постоянного тока НВ, работающие на постоянное внешнее сопротивление)
б) 1<n<3 (вентиляторы, центробежные насосы, компрессоры, гребные установки)
в) n=-1 (моталки, разматыватели, некоторые прокатные станы, металлорежущие станки)
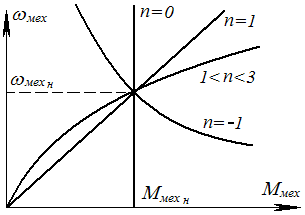
n – степень зависимости момента от скорости
III. Механизмы нагрузка, которых является функцией пути РО (поршневые насосы, прессы, ножницы, подъемники без уравновешивающих канатов)
IV. Механизмы нагрузка, которых является функцией скорости и пути (рулевые устройства судов, машины электрического транспорта, разводные мосты)
V. Механизмы нагрузка, которых является случайной функцией времени (дефибреры, шаровые мельницы, буровые установки)
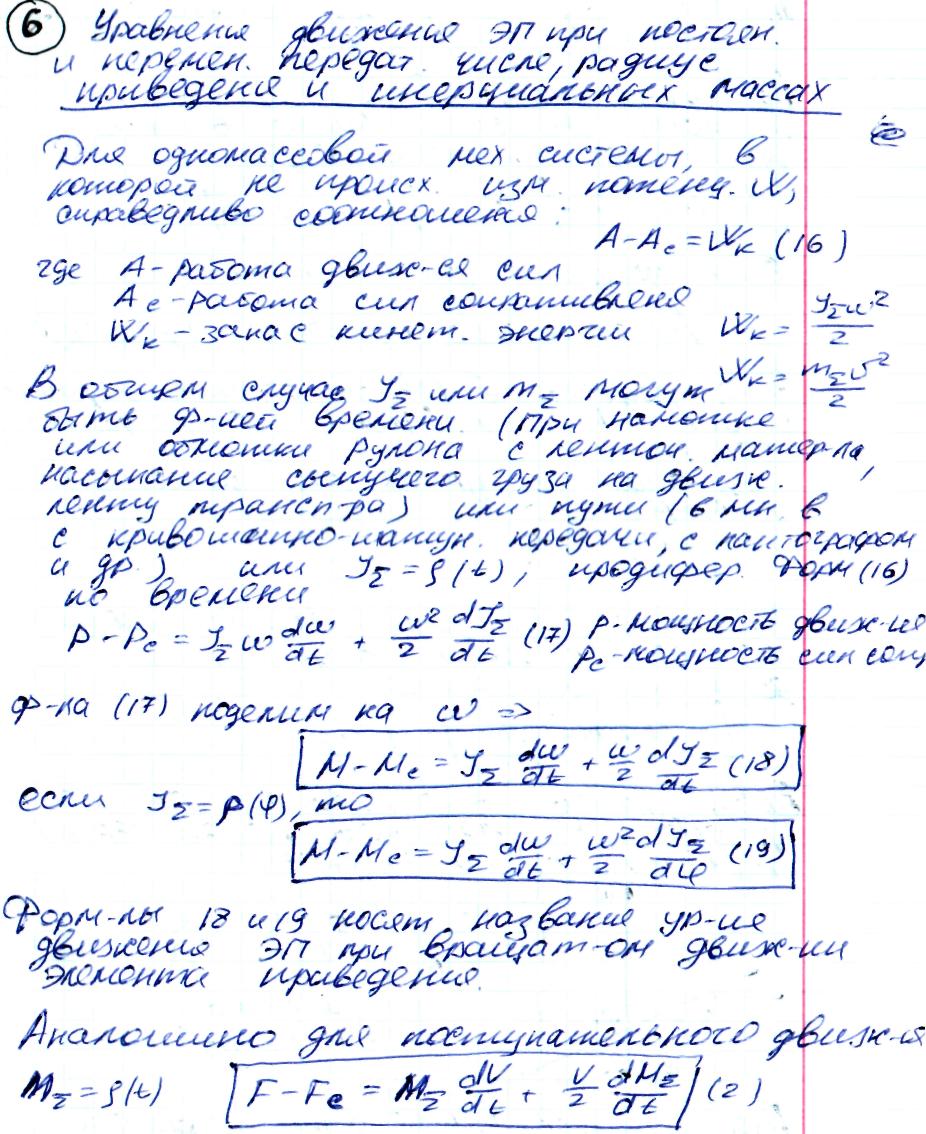
6. Механические системы с нелинейными кинематическими связями. Примеры нелинейных механических преобразователей в ЭП. Вывод уравнений жесткого приведенного механического звена для случаев зависимости движущейся массы: а) от времени, б) от пути.
7. Режимы работы, характеристики и ограничения в ЭП. Статическая и динамическая жесткость механических характеристик ЭД и ЭП.
По зависимости от времени выходной переменной режимы работы ЭП делятся на статические (постоянство переменной) и динамические (изменение переменной во времени). Последние по виду изменения переменной подразделяются на две группы:
-переходные процессы (переход переменной от одного уровня к другому);-установившиеся динамические режимы (периодическое изменение переменной).Динамические режимы возникают вследствие скачкообразного или плавного изменения во времени управляющих или возмущающих .воздействий, а иногда тех и других одновременно. Управляющим называется сознательное воздействие на ЭП с целью изменения уровня выходной переменной. Процессы пуска, торможения. реверсирования ЭП - это примеры переходных процессов, обусловленных изменением управляющего воздействия. Возмущающими называются воздействия, обусловленные внешними факторами (случайные изменения выходных переменных источника питания, нагрузки на валу, температуры окружающей среды и др.).Зависимость со = f(M) (или V = f(F)) называется механической характеристикой ЭД (ЭП). Различают статические и динамические механические характеристики. В каждой точке статической характеристики ЭД может работать весьма долго, а переход из одной точки в другую происходит с ускорением, стремящимся к нулю. Динамическая характеристика,
называемая иначе фазовой траекторией, получается из кривых м/и и Mfu путем исключения времени
![]()
![]()
Статические характеристики могут быть линейными и нелинейными. Параметром, характеризующим наклон характеристики в рассматриваемой точке, является статическая жесткость
Жесткость линейных характеристик может меняться в широких пределах от 0 до + да (рис. 1.3), являясь постоянной для каждой характеристики. Динамическая жесткость - это передаточная функция ЭМП в операторной форме, где входом является w(p) или V(p), а выходом - - М(р) или F(p). При вращательном движении.
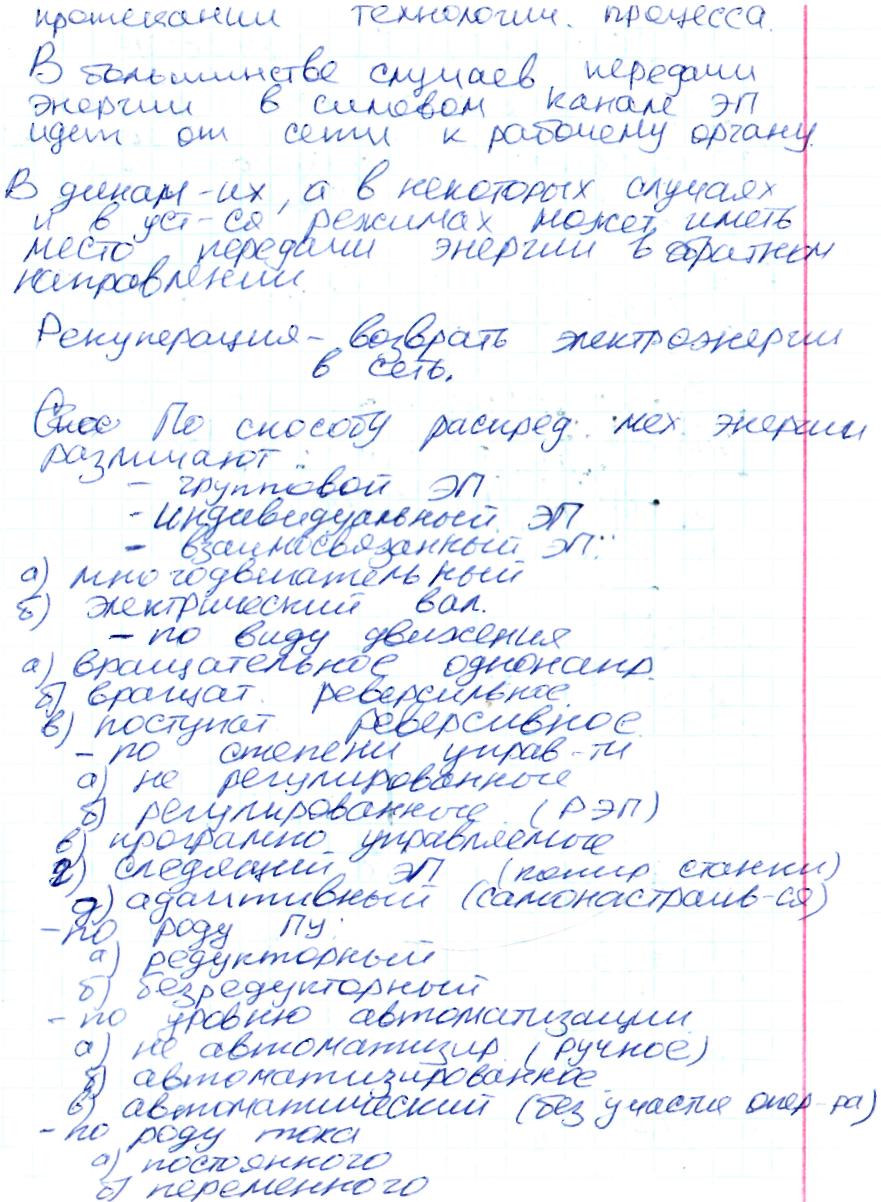
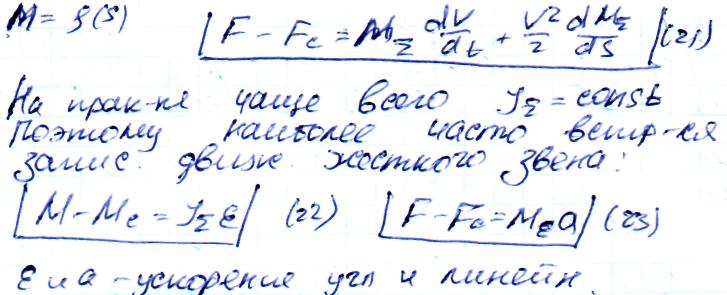
Заметим, что статическая жесткость - это частный случай динамической жесткости при безынерционном ЭМП. Основные режимы работы ЭД со стороны электрического входа - двигательный (потребления электроэнергии) и генераторный (производства электроэнергии). Преобразование электрической мощности Рэл в механическую (Рмех=Мw или Рмех = FV) и обратно сопровождается потерями мощности АР в ЭЭЧ и МЧ. По направлению потоков мощности и взаимодействию ЭП с источником электроэнергии выделяют три основных генераторных (тормозных) режима (рис. 1.4):
рекуперативный (отдача энергии источнику);
противовключение (работа генератором последовательно с источником на сопротивление силовой цепи);
динамическое торможение (работа генератором на сопротивление силовой цепи при отключенном источнике питания ЭЭЧ).
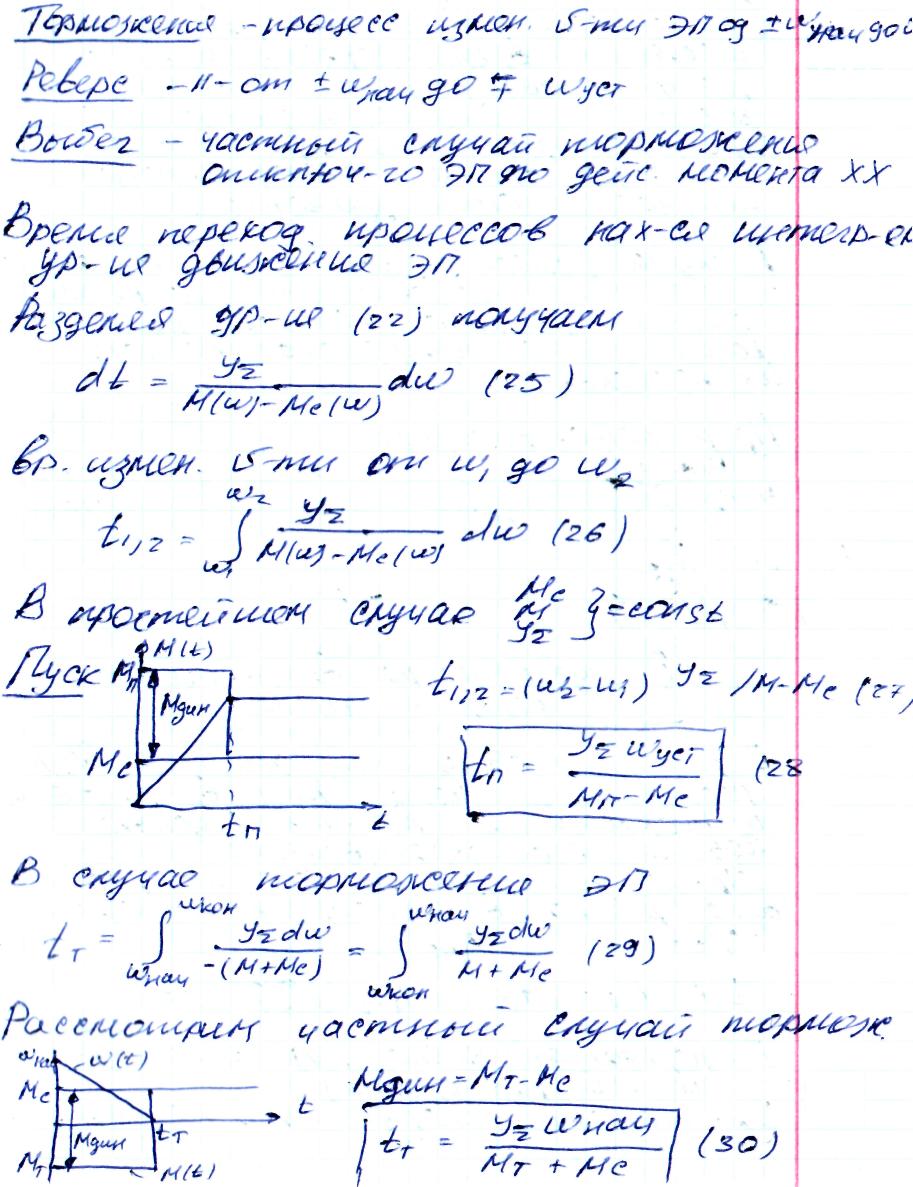
Помимо основных встречаются и другие электрические тормозные режимы (рекуперативно-динамического торможения и др.) Иногда вместо электрического применяется механическое торможение (например, посредством электромагнитного тормоза). Частный случай механического торможения отключенного ЭП под действием механических потерь в нем получил название выбега .
Работа ЭП происходит в условиях реальных ограничений механических и электрических переменных. Ограничения по перемещениям обусловлены конечной длиной рабочего участка траектории движения РО (например, высотой шахты лифта). Скорость регулируемого ЭП чаше всего ограничивается требованиями технологического процесса. При этом максимальная скорость ЭД лимитируется механической прочностью ротора, нормальными условиями работы подшипников, допустимым уровнем напряжения на обмотках, обусловленным ЭДС вращения, а также условиями коммутации и устойчивой работы коллекторных ЭД.
Ограничение ускорений достигается ограничением передаваемых в МЧ моментов (сил), а значит, и токов в обмотках ЭД. Уровень ограничения кратковременных (от долей до нескольких секунд) максимальных моментов коллекторных ЭД определяется допустимым искрением в щеточно-коллекторном узле, зависящим от тока якоря У питающихся от сечи асинхронных и синхронных ЭД максимальный момент ограничивается значением при нижнем допустимом уровне сетевого напряжения.
Срок службы двигателя и преобразователя определяет ограничение по нагреву. Степень нагрева определяется зависящей от нагрузки мощностью тепловых потерь, видом вентиляции и временем работы. Максимальная температура нагрева не должна превышать допустимой для данного класса изоляции Указываемый в паспортных данных ЭД и II номинальный ток определяет допустимый уровень нагрева в номинальном режиме работы
Лимитируемыми переменными часто являются производные тока di/dt и (или) напряжения dU/dt. Превышение ими допустимых значений приводит к выходу из строя силовых полупроводниковых элементов (тиристоров, транзисторов, диодов и др) преобразователей и недопустимому ухудшению коммутации коллекторных машин
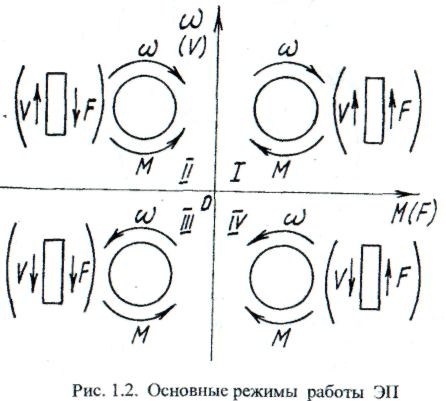
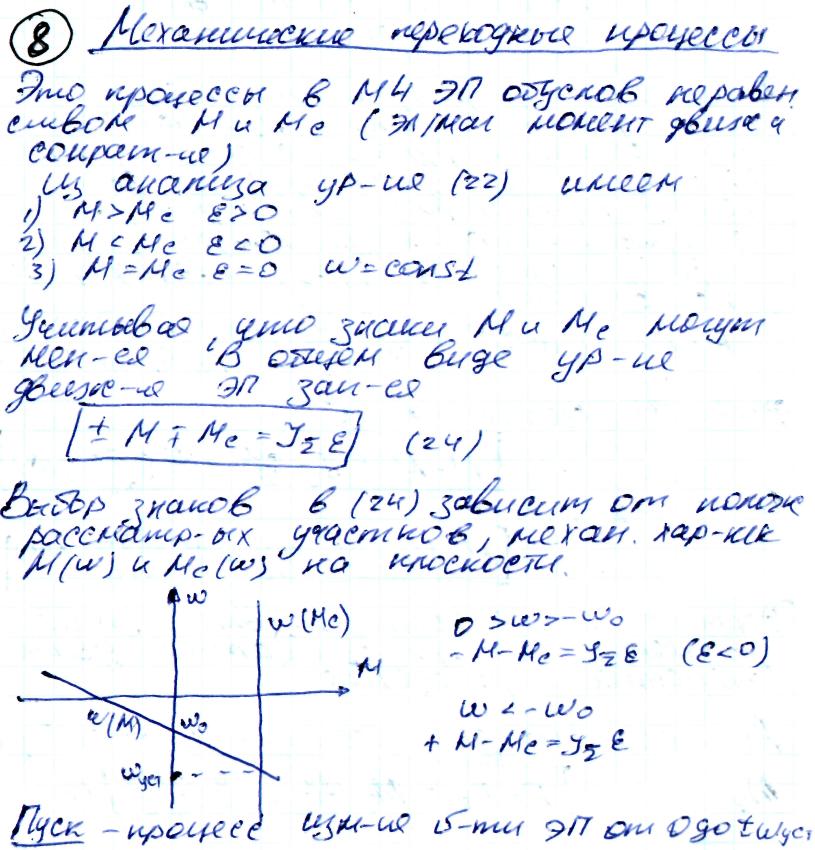
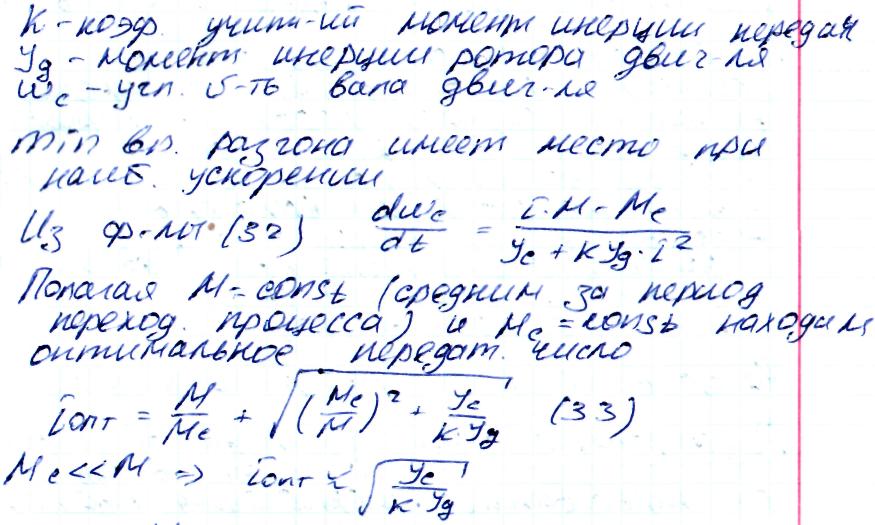
8. Нахождение зависимостей M(t), Mc(t) и ω(t) при графическом задании характеристик ω(М) и ω(Мс). Определение наивыгоднейшего передаточного числа.

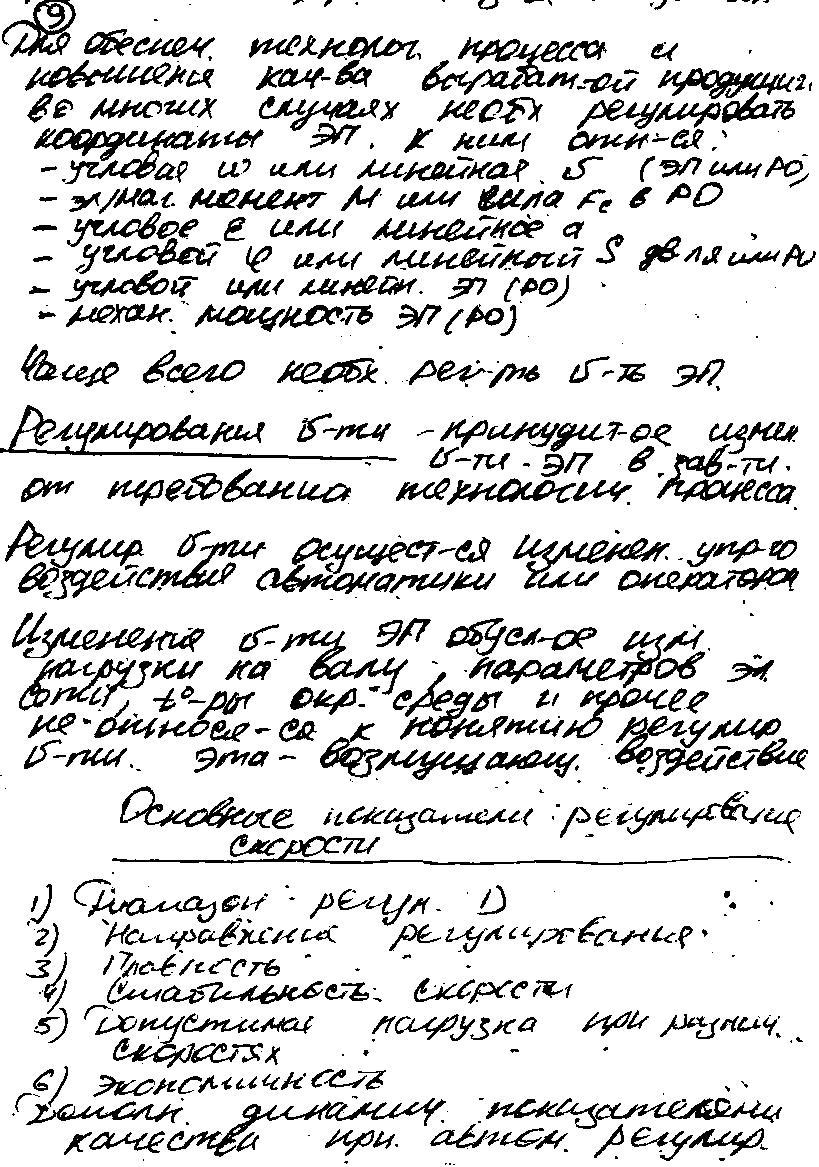
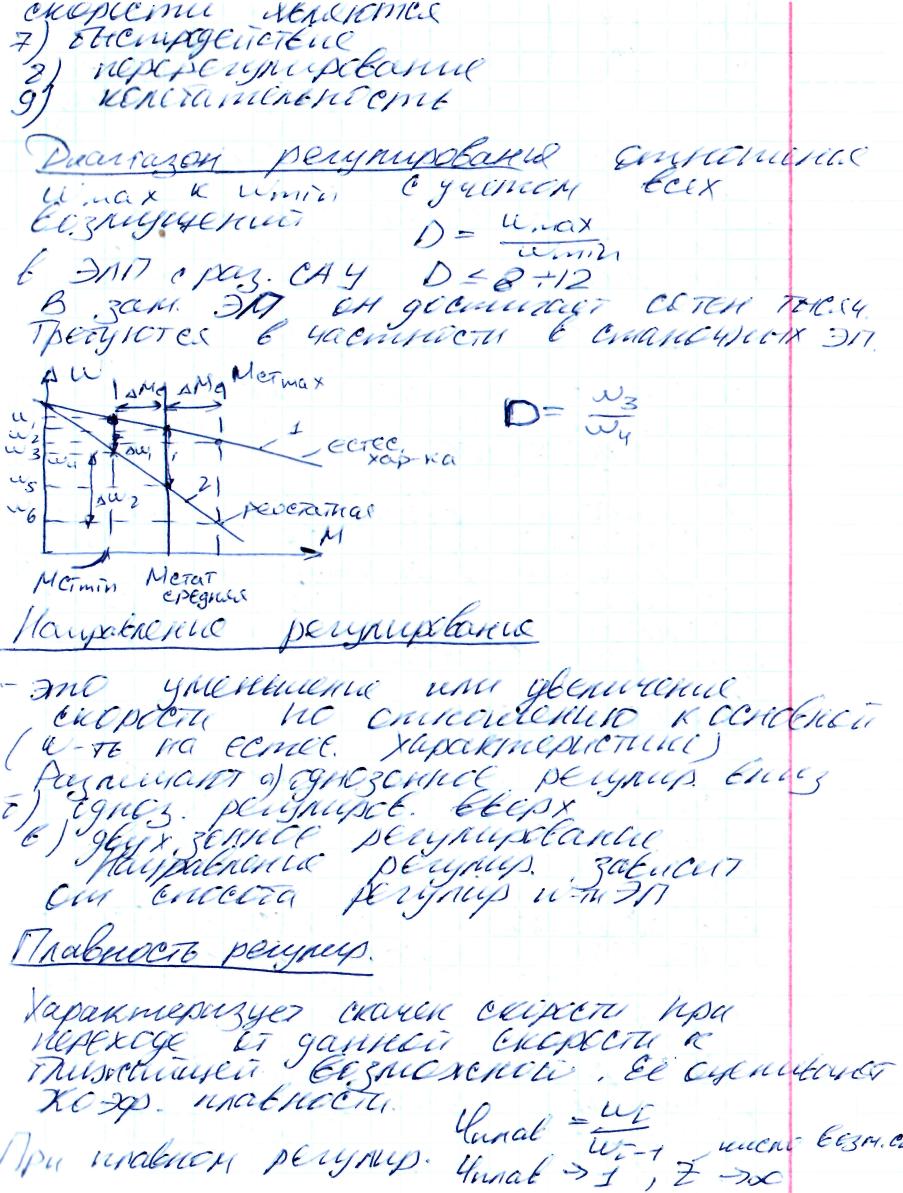
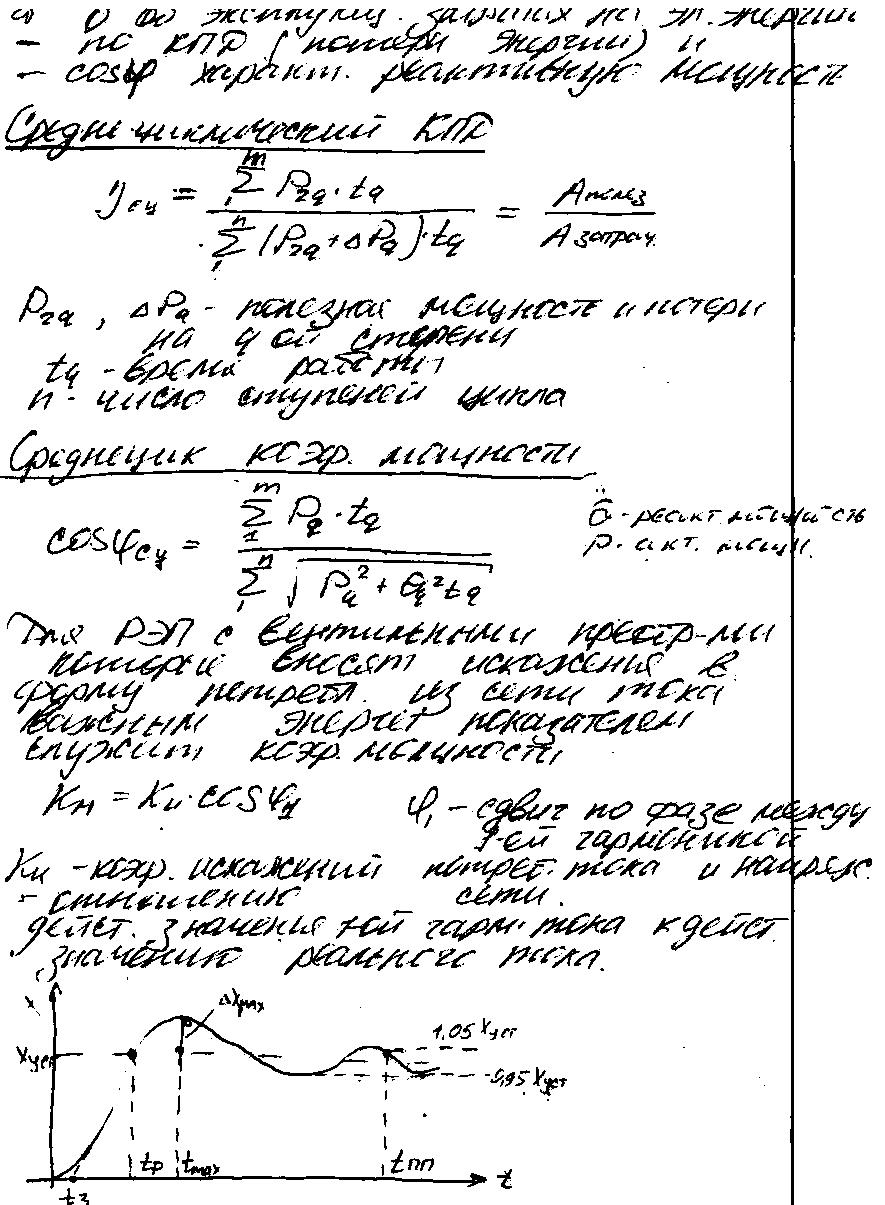
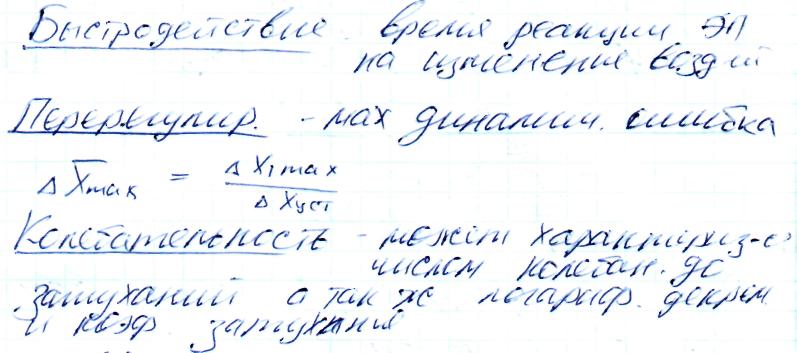
9. Регулируемые координаты ЭП. Показатели регулирования переменных в ЭП.
![]()
![]()
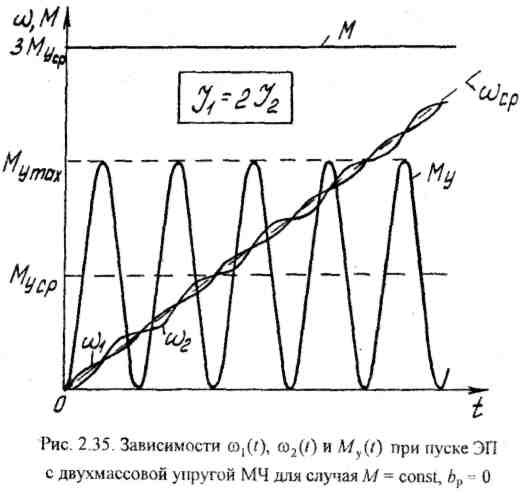
10. Динамика двухмассовой упругой механической системы. Математическое описание, структурная схема с кинематическим зазором, зависимости ω1(t), ω 2(t) и Mу(t) при пуске системы с М = const, Мс = const, bc = bp= 0 и полным начальным зазором.
В соответствии с расчетной схемой (рис. 2.6) составим систему уравнений динамики в операторной форме, полагая, что на первую массу действует только внешний электромагнитный момент ЭД М = const, а на вторую массу - суммарный момент нагрузки, включающий активную составляющую Мса, составляющие сухого Мсс и внешнего вязкого Мсв трения.
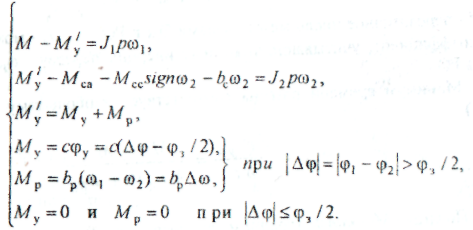

На основании математического описания (2.41) получим структурную схему механической системы (рис. 2.31)
В зависимости от состояния зазора (открыт или выбран) в системе возможны 2 вида движения масс:
а) независимое под действием внешних воздействий;
С целью нахождения зависимостей w1(t) и w2(t) во втором случае (б) получим передаточные функции для скоростей по управляющему воздействию, для чего произведем преобразование исходной структурной схемы. Передаточная функция интегратора 1/(J2p), охваченного отрицательной обратной связью с коэффициентом bc:
Перенесем выход обратной связи по w2 к левому сумматору моментов, а вход обратной связи по My, - к скорости w2 . Преобразованная схема принимает вид, показанный на рис 2.32.Передаточная функция верхнего замкнутого контура
Передаточная функция замкнутой системы
![]()
Для
получения передаточной функции Ww1(p)
перенесем вход обратной связи по Mу
к скорости w2.
Получаем схему, изображенную на рис.2.33.
Передаточная функция внутреннего
замкнутого контура