

Электромагнитные приводы аппаратов
Принципы расчета. В тяговых аппаратах электромагнитные приводы применяют только как индивидуальные. Попытки применения их в качестве групповых не увенчались успехом, так как эти приводы при значительных перемещениях подвижных частей оказываются громоздкими и потребляют больше энергии, имея низкий к. п. д. Их характеристики особенно при больших токах не вполне благоприятны. Кроме аппаратов защиты, их обычно имеют индивидуальные контакторы вспомогательных цепей и реле различного назначения.
Основная часть приводов — электромагниты разнообразны по конструкции (см. I—VIII на рис. 4.11) и характеристикам. Наибольшее распространение имеют электромагниты клапанного типа.
По уравнению Максвелла
сила магнитного притяжения ,
Н, зависит от индукции в воздушном зазоре
,
Н, зависит от индукции в воздушном зазоре
 ,
Тл:
,
Тл:
= ,
(4.11)
,
(4.11)
где
— площадь поперечного сечения воздушного
зазора,
;
=1,256∙ Гн/м;
—магнитный
поток в воздушном зазоре, Вб;
Гн/м;
—магнитный
поток в воздушном зазоре, Вб;
 =3,98∙
м/Гн. Точно определить площадь
трудно, так как она зависит не только
от конструкции аппарата, но и от его
расположения. Ориентировочно
=3,98∙
м/Гн. Точно определить площадь
трудно, так как она зависит не только
от конструкции аппарата, но и от его
расположения. Ориентировочно
 ,
,
где
 — площадь поверхности торца сердечника,
.
— площадь поверхности торца сердечника,
.
Сила магнитного
притяжения
зависит от энергии
 ,
затрачиваемой м. д. с. θ
на создание магнитного потока в воздушном
зазоре,
,
затрачиваемой м. д. с. θ
на создание магнитного потока в воздушном
зазоре,
 /d
/d
Величину
можно определить как  .
.
Приближенно определить
силу
можно, построив магнитные характеристики
системы с различными воздушными зазорами
 и
и
 (рис. 4.12). Соответственно ∆δ
=
(рис. 4.12). Соответственно ∆δ
=
 ,
приращение энергии
,
приращение энергии
∆
= dθ-
dθ- dθ≅∆
dθ≅∆ .
.
Тогда сила магнитного притяжения
 ,
,

Рис. 4.11. Электромагниты, применяемые в тяговых аппаратах
где
 — масштабы в диаграммах Ф
— масштабы в диаграммах Ф
 соответственно для магнитного потока
и м.д.с.;
соответственно для магнитного потока
и м.д.с.;
 — площадь, заключенная между
рассматриваемыми магнитными
характеристиками в пределах от нуля до
0.
— площадь, заключенная между
рассматриваемыми магнитными
характеристиками в пределах от нуля до
0.
Если есть возможность
рассчитать магнитные характеристики
обычным путем для различных значений
б, то получают семейство- характеристик
 при δ
= const или
при δ
= const или
 при δ
= const. При проектировании электромагнитов
возникают сложности в связи с тем,
что для расчета необходимы размеры,
которые можно получить в результате
расчета. Поэтому, особенно при мелкосерийном
производстве, широко используют
унификацию магнитных систем приводов.
На рис. 4.13 в качестве примера представлены
два реле (тяговое исполнение) фирмы
«Шкода» различного назначения: перегрузки
и дифференциальное. Оба имеют
унифицированную П- образную шихтованную
магнитную систему. На базе этой магнитной
системы выполняют несколько десятков
реле различного назначения. Конечно,
в этом случае не приходится ожидать
высоких конструктивных показателей,
особенно массо-габаритных.
при δ
= const. При проектировании электромагнитов
возникают сложности в связи с тем,
что для расчета необходимы размеры,
которые можно получить в результате
расчета. Поэтому, особенно при мелкосерийном
производстве, широко используют
унификацию магнитных систем приводов.
На рис. 4.13 в качестве примера представлены
два реле (тяговое исполнение) фирмы
«Шкода» различного назначения: перегрузки
и дифференциальное. Оба имеют
унифицированную П- образную шихтованную
магнитную систему. На базе этой магнитной
системы выполняют несколько десятков
реле различного назначения. Конечно,
в этом случае не приходится ожидать
высоких конструктивных показателей,
особенно массо-габаритных.
Расчет по конструктивному подобию. Этот метод более пригоден для условий крупносерийного и массового производства — использование принципов конструктивного подобия, т. е. обобщение опыта проектирования, производства и эксплуатации. Имеется несколько методов таких расчетов. Рассмотрим один из них, наиболее пригодный для электромагнитов клапанного типа.

Рис. 4.12. К определению силы FM притяжения электромагнита
За обобщенный
показатель сравнения принят диаметр
 сердечника электромагнита (рис. 4.14).
сердечника электромагнита (рис. 4.14).
Все остальные сопоставимые размеры магнитов выражают в относительных единицах, сравнивая с .

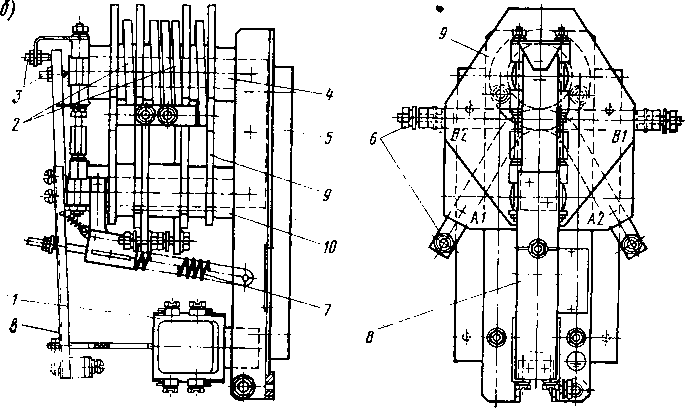
Рис 4.13. Реле
перегрузки 1RPD18 (а) на 3 кВ,
—715>
А,
 — 0,8 кА и дифференциальное реле RRPD4 (б)
на 3 кВ,
=200/400
А, ток срабатывания ∆I
= 20÷25
А с унифицированной магнитной системой:
— 0,8 кА и дифференциальное реле RRPD4 (б)
на 3 кВ,
=200/400
А, ток срабатывания ∆I
= 20÷25
А с унифицированной магнитной системой:
1-контакты в цепи управления; 2 -катушки шинные. З- винт регулирования 4- магнитопровод П-образный шихтованный; 5 - основание, 6 -зажимы катушек, 7 - пружина; 8 - якорь; 9 - изоляционные прокладки; 10 - изоляция сердечника
Относительные
значения размеров имеют дополнительный
индекс «0», например
 = x/
.
Эти размеры определяют для выполненных
аппаратов:
= x/
.
Эти размеры определяют для выполненных
аппаратов:
 = 1,0 ÷1,25;
= 1,0 ÷1,25;
 =1,4 ÷1,56;
=1,4 ÷1,56;
 = 3,0 ÷3,7;
= 3,0 ÷3,7;
 = 0,1 ÷0,2;
= 0,25 ÷0,30;
= 0,1 ÷0,2;
= 0,25 ÷0,30;
 = 2,4 ÷2,8;
= 2,4 ÷2,8;
 = 3,0 ÷3,4;
= 0,7 ÷0,9;
= 3,0 ÷3,4;
= 0,7 ÷0,9;
 = 1,0 ÷
1,25;
= 1,0 ÷
1,25;
 =
2,5 ÷3,0.
=
2,5 ÷3,0.

Рис. 4.14. Схема электромагнита клапанного типа
Принцип конструктивного подобия дает возможность также получить обобщенные характеристики электромагнитов (рис. 4.15). Для этого вводят обобщенное относительное значение воздушного зазора.
 ).
(4.12)
).
(4.12)
Второй относительный условный показатель F0 характеризует силу, развиваемую электромагнитом,
 ,
(4.13)
,
(4.13)
где — сила магнитного притяжения, Н; - м. д. с., А.
При проектировании
электромагнита определяют сопротивления
перемещению подвижной системы аппарата
так же, как и для электропневматического
привода. Величина FTB отсутствует, но
обычно несколько возрастает G'. Для
срабатывания, т. е. трогания подвижной
части, необходимо, чтобы
 .
.

Рис. 4.15. Зависимости
 для
электромагнитов клапанного типа (а) и
для систем с Г-образным якорем (б)
для
электромагнитов клапанного типа (а) и
для систем с Г-образным якорем (б)
Привод должен срабатывать при самых неблагоприятных условиях: наибольших силах трения, наибольшей жесткости выключающей пружины, наименьшем значении м. д. с. Для аппаратов защиты м. д. с. должна соответствовать минимальной уставке, для аппаратов оперативной коммутации — наименьшему напряжению, допустимому в цепях управления:
 .
По уравнению (4.11) можно ориентировочно
определить необходимую площадь полюса
сердечника,
,
исходя из индукции
.
По уравнению (4.11) можно ориентировочно
определить необходимую площадь полюса
сердечника,
,
исходя из индукции
 в полюсе
в полюсе
 .
.
Особенно для аппаратов защиты и вообще реле выбирают так, чтобы при наибольших м. д. с. катушки индукции в магнитопроводе и особенно в сердечнике не достигали значения, соответствующего насыщению стали. Обычно принимают ≃ 0,04 ÷0,10 Тл.
Для наиболее распространенных в электромагнитах постоянного тока круглых сердечников диаметр полюса, м,
 .
.
Зная
 по уравнению (4.12), можно определить
по уравнению (4.12), можно определить
 ,
а также
=
,
а также
= .
.
Используя данные, можно ориентировочно наметить один или несколько вариантов конструктивного выполнения аппарата, проверив их по возможности размещения катушки и по характеристикам.
Из кинематической
схемы аппарата определяют необходимое
значение
 ,
соответствующее полному выключению.
По уравнению (4.12) для
,
соответствующее полному выключению.
По уравнению (4.12) для
 находят значение 6С0, что позволяет по
характеристике F0 (60) получить значение
находят значение 6С0, что позволяет по
характеристике F0 (60) получить значение
 ).
Из уравнения (4.13) необходимое значение
м. д. с. определяется как
).
Из уравнения (4.13) необходимое значение
м. д. с. определяется как
 ).
).
Для номинального режима расчетные значения:
 и
и

Здесь первая
зависимость — для аппаратов оперативной
коммутации, вторая — для аппаратов
защиты и реле. Коэффициент регулирования
 =(
=( , где
, где
 - соответственно верхняя и нижняя уставка
аппарата.
- соответственно верхняя и нижняя уставка
аппарата.
Площадь поперечного сечения катушки, необходимая для ее размещения в аппарате, ,
 ,
,
где — коэффициент заполнения обмоточного пространства; — допустимая плотность тока.
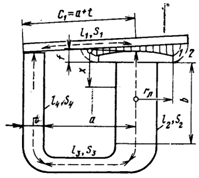
Рис. 4.16. Магнитная система реле
Сравнение и S позволяет оценить исполнимость конструкции ее рациональность, определить содержание необходимых корректировок.
По характеристике
)
можно также построить ориентировочную
характеристику
 )
электромагнита в пределах от
)
электромагнита в пределах от
 до значения
до значения
 ,
соответствующего
= 0,04 — зазору, необходимому во
включенном аппарате для того, чтобы
якорь не прилипал к полюсу из-за
остаточного магнитного потока. Координаты
любой точки i характеристик
)
и
)
связаны уравнениями (4.12) и (4.13). Так, в
точке i
сила, Н,
,
соответствующего
= 0,04 — зазору, необходимому во
включенном аппарате для того, чтобы
якорь не прилипал к полюсу из-за
остаточного магнитного потока. Координаты
любой точки i характеристик
)
и
)
связаны уравнениями (4.12) и (4.13). Так, в
точке i
сила, Н,
 ∙
∙ .
.
Приведенный метод позволяет построить характеристику ) для аппарата одного типа и использовать ее как универсальную. Метод дает возможность получить обоснованные параметры и конструкцию электромагнита, его ориентировочные характеристики. Для аппаратов защиты и реле обязательно выполняют поверочный расчет электромагнита.
Поверочные расчеты.
Эти расчеты проводят для электромагнитов
с уже установленными размерами
магнитопровода, когда выбрана его
конструкция. Из многих методов таких
расчетов приведем один, часто применяемый
для тяговых аппаратов. В качестве
примера рассмотрим магнитопровод
одной из наиболее рациональных форм —
П-образный (рис. 4.16). В нем нет соединительных
стыков; он изготовлен из круглого
прутка, имеющего диаметр сердечника
.
По длине
 штамповкой выполнен постепенный переход
от круглого сечения к прямоугольному
на участке
штамповкой выполнен постепенный переход
от круглого сечения к прямоугольному
на участке
 .
.
Расчет начинают с
определения магнитной проводимости
воздушного зазора
 ,
складывающейся из проводимостей по
площади полюса G, по его верхней
,
складывающейся из проводимостей по
площади полюса G, по его верхней
 и нижней
и нижней
 кромкам, Тл/А:
кромкам, Тл/А:
 ,
,
где
 ;
;

 .
.
Здесь все размеры
даны в сантиметрах. Значения
находят для нескольких воздушных зазоров
δ.
Определяют удельную магнитную
проводимость
 для потоков рассеяния стержня, практически
не зависящую от воздушного зазора,
для потоков рассеяния стержня, практически
не зависящую от воздушного зазора,
≅2 )/
)/ .
.
Средний коэффициент рассеяния

где
 — коэффициент магнитного рассеяния на
текущем расстоянии x
от поверхности полюса.
— коэффициент магнитного рассеяния на
текущем расстоянии x
от поверхности полюса.
Удобно обозначить
α= Тогда
для рассматриваемой магнитной системы
Тогда
для рассматриваемой магнитной системы
 =(1/b)
=(1/b) .
.
Так как значение α изменяется с изменением воздушного зазора, его рассчитывают для нескольких значений δ и строят зависимость (δ).
В дальнейшем задача
сводится к расчету магнитных характеристик
с учетом магнитного рассеяния для
различных
 = const. Задаются магнитным потоком
в воздушном зазоре и определяют м. д.
с., необходимую для его получения,
= const. Задаются магнитным потоком
в воздушном зазоре и определяют м. д.
с., необходимую для его получения,
θ=
М. д. с., необходимые
для компенсации падений магнитного
напряжения соответственно в воздушном
зазоре
 ,
на стальных участках
,
на стальных участках
 ,
в потоке рассеяния
,
в потоке рассеяния
 :
:
 ,
,
где
 —
магнитная напряженность на i-м
участке из их общего числа n,
зависящая от материала и индукции на
участках длиной /г с площадью поперечного
сечения
—
магнитная напряженность на i-м
участке из их общего числа n,
зависящая от материала и индукции на
участках длиной /г с площадью поперечного
сечения
 ;
;
 .
.
Подобным образом
получают семейство характеристик
(θ),
по которым находят статические
характеристики электромагнита
)
или
).
Если воздушный зазор сравнительно
невелик и невелико рассеяние, то
 определяют по уравнению (4.11). В других
случаях используют метод приращений
магнитной энергии (см. с. 112). Характеристики
электромагнитов отличаются нарастанием
по мере снижения δ.
определяют по уравнению (4.11). В других
случаях используют метод приращений
магнитной энергии (см. с. 112). Характеристики
электромагнитов отличаются нарастанием
по мере снижения δ.
Характеристики электромагнитного индивидуального контактора. Все основные величины обозначим так, как в электропневматическом контакторе (см. рис. 4.6). При электромагнитных приводах
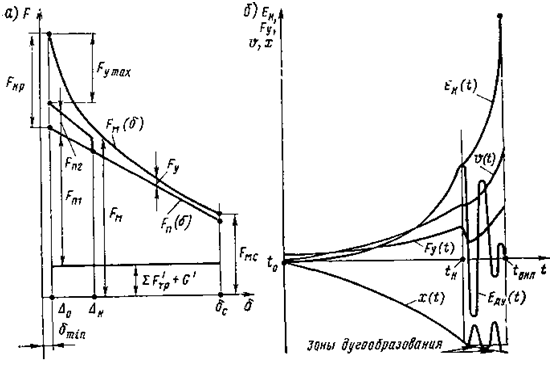
Рис. 4.17. Статическая характеристика электромагнитного
контактора (а) и его характеристики при включении (б)
большое значение
имеет воздушный зазор δ,
поэтому он, а не перемещение, принимается
в качестве независимой переменной (рис.
4.17, а). При этом х
=
-
 и
х = -
.
и
х = -
.
У электромагнитного привода d /dx > 0, у электропневматического d /dx < 0. Нарастание ускоряющей силы , особенно в конце процесса включения, вызывает повышение скорости подвижной системы и накопленной ею кинетической энергии (рис. 4.17, б)
 (4.14)
(4.14)
В промежуток времени
от
 - момента начального касания контактов
до
- момента начального касания контактов
до
 -
момента окончательного включения
энергии
-
момента окончательного включения
энергии
 должна быть погашена в системе. Часть
ее ∆
должна быть погашена в системе. Часть
ее ∆ поглощается
в результате увеличения по сравнению
ранее учтенными силами трения
поглощается
в результате увеличения по сравнению
ранее учтенными силами трения
 .
Кроме того, возникают дополнительные
силы трения контактов
.
Кроме того, возникают дополнительные
силы трения контактов
 ,.. Значительная часть энергии затрачивается
на деформацию пружин и контактов. В
ее состав входит энергия
,.. Значительная часть энергии затрачивается
на деформацию пружин и контактов. В
ее состав входит энергия
 упругих и энергия
упругих и энергия
 пластических деформаций основных
контактов
пластических деформаций основных
контактов
≅∆ +
+
Энергия — это та часть , которой обмениваются соударяющиеся элементы. Высока вероятность того, что такой обмен приведет к колебательному процессу, при котором может измениться направление потока энергии и связанное с этим нарушение контактного соединения, что видно из кривой х(t). Возникающие отрывы подвижного контакта от неподвижного сопровождаются образованием дуги между рабочими поверхностями контактов, что приводит к их повреждению. Эффект вибрации подвижного контакта при включении тем сильнее, чем больше масса подвижной части, что ясно из уравнения (4.14).
Из-за столь неблагоприятных характеристик включения контакторы с электромагнитным приводом не применяют в силовых цепях, их используют только в цепях управления или вспомогательных, где токи не так велики. Электромагниты для них используют с возможно более пологими характеристиками, например, конструкции II и VIII, показанных на рис. 4.11.
Электромагниты переменного тока. У таких электромагнитов сила магнитного притяжения непостоянна, ее мгновенные значения

где к - коэффициент
пропорциональности;
 - амплитудное значение индукции в
воздушном зазоре (рис. 4.18, а).
- амплитудное значение индукции в
воздушном зазоре (рис. 4.18, а).
Это синусоида двойной частоты, смещенная относительно оси абсцисс на отрезок, равный , т. е. сила направлена односторонне, но пульсирует от максимального значения до нуля. Так как силы сопротивления и особенно силы пружин постояйны, то появляется несбалансированная переменная составляющая АД вызывающая вибрации якоря, так называемый звонковый эффект, приводящий к повышенному износу и неустойчивости работы аппарата
.
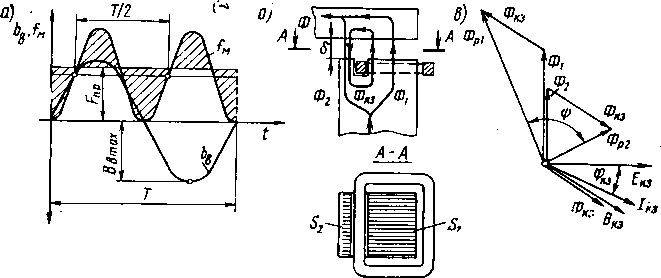
Рис. 4.8. Диаграмма величин
и  пульсаций электромагнита
переменного
тока (а), его
демпферный виток (б) и векторная диаграмма
при таком витке (в)
пульсаций электромагнита
переменного
тока (а), его
демпферный виток (б) и векторная диаграмма
при таком витке (в)
Для его нейтрализации
применяют на полюсах демпферные витки
(экраны), охватывающие лишь часть сечения
полюса (рис. 4.18, б). Потоком
 охваченным этим витком, в нем наводится
э. д. с.
охваченным этим витком, в нем наводится
э. д. с.
 .
.
Она вызывает в витке
ток
 ,
сдвинутый по фазе на угол
,
сдвинутый по фазе на угол
 (рис. 4.18, в), который зависит от активного
и реактивного сопротивлений витка.
Ток
создает м. д. с., также отстающую от тока
на угол
(рис. 4.18, в), который зависит от активного
и реактивного сопротивлений витка.
Ток
создает м. д. с., также отстающую от тока
на угол
 ,
который вызван магнитным запаздыванием.
В фазе с
,
который вызван магнитным запаздыванием.
В фазе с
 находится вектор магнитного потока
находится вектор магнитного потока
 .
Результирующие магнитные потоки
.
Результирующие магнитные потоки
 и
и
 в частях сердечника площадью
в частях сердечника площадью
 и
и
 :
:

Сила магнитного притяжения
 +
+
где
 и
и
 — амплитудные значения результирующих
потоков.
— амплитудные значения результирующих
потоков.
Наличие двух сил,
сдвинутых по фазе на угол
 ,
хотя и не устраняет пульсации
результирующей силы
,
но настолько снижает их, что может
устранить звонковый эффект. Наилучшие
результаты будут при |
|
≅
|
,
хотя и не устраняет пульсации
результирующей силы
,
но настолько снижает их, что может
устранить звонковый эффект. Наилучшие
результаты будут при |
|
≅
| ;
= 90°, что соответствует соотношению
площадей
/(
÷
)
≅0,7÷0,85.
При этом сопротивление витка, Ом,
;
= 90°, что соответствует соотношению
площадей
/(
÷
)
≅0,7÷0,85.
При этом сопротивление витка, Ом,
 ,
,
где
 — частота напряжения; все размеры даны
в сантиметрах.
— частота напряжения; все размеры даны
в сантиметрах.
Электромагниты переменного тока получаются более громоздкими и менее быстродействующими, чем электромагниты постоянного тока. Поэтому часто вместо реле с катушкой, включенной в цепь переменного тока, применяют реле постоянного тока, катушка которого включена через выпрямитель.
Процессы включения и выключения аппаратов с электромагнитным приводом постоянного тока. На эти процессы влияют высокие индуктивности катушек, инерция подвижных частей и вихревые токи в магнитопроводах. Уравнение напряжений при включении электромагнитного привода
u=iR+Ldi/dt.
Откуда
i= ,
(4.15)
,
(4.15)
где
 — установившееся значение тока:
=
u/R;
Т — постоянная времени цепи: Т = L/R.
— установившееся значение тока:
=
u/R;
Т — постоянная времени цепи: Т = L/R.
При выключенном
аппарате воздушный зазор
велик и магнитная цепь не насыщена;
поэтому L = const, начальная постоянная
времени
 = const и i (t)
— экспонента (рис. 4.19).
= const и i (t)
— экспонента (рис. 4.19).
 При
нарастании тока и силы магнитного
притяжения трогание подвижной системы
начнется, когда
При
нарастании тока и силы магнитного
притяжения трогание подвижной системы
начнется, когда
 М.д.с.
М.д.с. ,
соответствующая моменту трогания, будет
при токе
,
соответствующая моменту трогания, будет
при токе
 ,
где w
- число витков катушки.
,
где w
- число витков катушки.
Время трогания находят из уравнения (4.15)

Его можно выразить
и через коэффициент запаса системы
 .
.
Откуда

П
Рис. 4.19 Изменение тока при включении аппарата с электромагнитным приводом
олученные зависимости точны только для электромагнитов с шихтованными магнитопроводами, при которых вихревые токи пренебрежимо малы. В нешихтованных магнитопроводах часть м. д. с. от тока в катушке идет на создание вихревых токов
 ,
,
где
 — коэффициент вихревых токов, зависящий
от структуры магнитной системы; а
= i/Ф — коэффициент
пропорциональности между током и
магнитным потоком для ненасыщенных
магнитопроводов.
— коэффициент вихревых токов, зависящий
от структуры магнитной системы; а
= i/Ф — коэффициент
пропорциональности между током и
магнитным потоком для ненасыщенных
магнитопроводов.
Вихревые токи
увеличивают ток трогания
 ;
возрастает и время трогания
;
возрастает и время трогания

Точный расчет периода движения с учетом всех факторов очень сложен; обычно задачу упрощают, рассматривая лишь два основных дифференциальных уравнения:
 и
и

где x
— путь, проходимый якорем;
 — силы сопротивления движению.
— силы сопротивления движению.
Эти уравнения не линейны, обычно их решают графоаналитическим методом с переходом к конечным разностям. В конечных приращениях:
 ;
(4.16)
;
(4.16)
 .
(4.17)
.
(4.17)
Как исходные для расчета необходимы характеристики электромагнита Ф (i) при различных постоянных воздушных зазорах и статическая характеристика аппарата.
Механическая работа
 при движении системы на участке
при движении системы на участке
 пропорциональна площади S
(рис. 4.20) между смежными магнитными
характеристиками для зазоров
и
пропорциональна площади S
(рис. 4.20) между смежными магнитными
характеристиками для зазоров
и
 .
При трогании току
.
При трогании току
 на характеристике для
на характеристике для
 соответствует точка а.
Ее соединяют отрезком прямой с точкой
b,
выбранной на характеристике для
соответствует точка а.
Ее соединяют отрезком прямой с точкой
b,
выбранной на характеристике для
 .
При выборе точки b
стараются предугадать ее положение; в
данном случае предполагается увеличение
тока на
.
При выборе точки b
стараются предугадать ее положение; в
данном случае предполагается увеличение
тока на
 .
Для любого интервала
:
.
Для любого интервала
:

где
 ,
,
 — масштабы соответственно тока и
магнитного потока.
— масштабы соответственно тока и
магнитного потока.
По статической
характеристике привода для перемещения
 определяют средние значения сопротивления
движению
определяют средние значения сопротивления
движению
 и приведенной массы
и приведенной массы
 .
Приращение скорости на участке находят
в соответствии с уравнением (4.6)
.
Приращение скорости на участке находят
в соответствии с уравнением (4.6)
 .
.
Время движения в
первом интервале
 .
Приращение магнитного потока
.
Приращение магнитного потока
 находят из графика рис. 4.20; средний ток
находят из графика рис. 4.20; средний ток
 .
.
Полученные средние
значения величин подставляют в уравнение
(4.16), проверяя сходимость его правой и
левой частей. При их расхождениях
корректируют положение точки в
и проделанный расчет. Если точка в
зафиксирована достаточно точно, переходят
к следующему приращению
 ,
повторяя расчет, как для
но учитывая изменившиеся начальные
условия
,
повторяя расчет, как для
но учитывая изменившиеся начальные
условия
 .
.
А
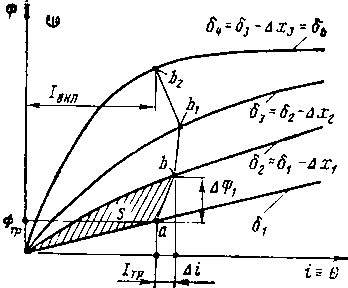
Рис. 4.20. К расчету процессов включения
налогично проводят расчет и для других участков, вплоть до значения зазора ,
соответствующего перемещению X.
В результате расчета получают время
движения
,
соответствующего перемещению X.
В результате расчета получают время
движения
 и зависимость
и зависимость
 .
Обычно при движении изменения тока
сравнительно невелики и в конце его
(при
)
.
Обычно при движении изменения тока
сравнительно невелики и в конце его
(при
)
 .
После включения ток нарастает по
экспоненциальному закону, но с постоянной
времени
.
После включения ток нарастает по
экспоненциальному закону, но с постоянной
времени
 ,
отличной от
,
отличной от
 что обусловлено изменением индуктивности
L
в результате уменьшения воздушного
зазора и насыщения магнитопроводов.
Началу этой экспоненты соответствует
точка
что обусловлено изменением индуктивности
L
в результате уменьшения воздушного
зазора и насыщения магнитопроводов.
Началу этой экспоненты соответствует
точка
 на оси абсцисс (см. рис. 4.19):
на оси абсцисс (см. рис. 4.19):
 .
.
Как и в начале процесса, вихревые токи задерживают его ход и увеличивают время достижения , однако это не имеет существенного значения для работы большинства аппаратов.
Процесс выключения катушки описывается зависимостью
 .
.
где
— ток в момент выключения;
 — постоянная времени отключения.
— постоянная времени отключения.
До момента отпадания
якоря
 и время отпадания с учетом вихревых
токов можно определить как
и время отпадания с учетом вихревых
токов можно определить как
 .
.
Приведенные зависимости не учитывают влияния характеристик выключающего устройства. Токовые катушки электромагнитных приводов имеют небольшую индуктивность, их собственные времени малы, а процесс выключения полностью зависит от вида выключающего устройства. Индуктивности потенциальных катушек сравнительно велики, что обычно приводит к образованию дуги или сильному искрению при выключении. В обоих случаях процессы в приводе будут больше зависеть от внешних факторов, чем от параметров самого привода. Поэтому процессы выключения надо рассматривать не для одного аппарата, а для соответствующего узла системы управления.
Особенно для
распорядительных аппаратов (реле) очень
важен показатель, характеризующий зону
нечувствительности аппарата — коэффициент
возврата
 .
Для устройства, не имеющих зоны
нечувствительности,
.
Для устройства, не имеющих зоны
нечувствительности,
 .
.
Структура электромагнитов приводов позволяет повышать или снижать быстродействие аппаратов, уменьшая или увеличивая вихревые токи в магнитопроводах. Так, для повышения быстродействия аппарата вихревые токи снижают, применяя магнитопроводы из шихтованной электротехнической стали с узкой петлей гистерезиса. Если быстродействие не требуется, применяют массивную магнитную систему, при которой время срабатывания обычно составляет 0,08—0,15 с. Для создания больших замедлений — выдержек времени — на сердечник электромагнита устанавливают полностью охватывающее его массивное кольцо из меди или латуни — демпферное кольцо, как бы усиливающее действие вихревых токов.
При изменениях
магнитного потока в кольце наводится
э. д. с.
 ,
где
,
где
 — число витков кольца. Эта э. д. с. вызывает
в кольце, имеющем очень малое электрическое
сопротивление
— число витков кольца. Эта э. д. с. вызывает
в кольце, имеющем очень малое электрическое
сопротивление
 ,
ток
,
ток
 и м. д. с.
и м. д. с.
 .
.
Результирующая м. д. с. электромагнита
 .
.
Задерживая изменения магнитного потока, например, в реле времени при регулировке воздушного зазора и пружины, выдержку времени срабатывания можно изменять в пределах от 0,5 до 3 с.