

Приводы тяговых коммутационныхаппаратов виды приводов, их статика и динамика
Классификация приводов. Большая часть тяговых коммутационных аппаратов — электромеханические; они осуществляют коммутации цепей в результате перемещения контактов. Устройства, выполняющие такие перемещения, называют приводами аппаратов. Тяговые аппараты — часть системы управления э. п. с., и их приводы выполняют не только чисто исполнительные функции (замыкание и размыкание контактов), но и часть распорядительно-информативных функций в системе управления. Так, приводы большинства реле — часть чувствительных элементов, выдающих дискретную информацию о показателях процессов в различных электрических цепях.
Приводы аппаратов выполняют также порядково-временное автоматическое связывание отдельных элементов сложной системы управления, т. е. обеспечивают правильную последовательность срабатывания различных элементов оборудования. Они же осуществляют функции ограничения свободных процессов — защиты в аварийных и экстремальных режимах. Некоторые приводы аппаратов выполняют логические операции (например, приводы дифференциальных реле), осуществляют регулирование отдельных процессов.
Так как тяговые аппараты работают в условиях действия многочисленных возмущений, к их приводам предъявляют повышенные требования в отношении стабильности характеристик, высокой помехоустойчивости и надежности. К этому добавляются требования эргономики, охраны труда, особенно электробезопасности, безопасности движения поездов.
Разнообразие условий работы, функций, особенностей эксплуатационного использования и условий производства приводит к многообразию разновидностей, типов и конструкций приводов аппаратов.
По условиям электробезопасности на э. п. с. непосредственный привод, т. е. привод, при котором аппарат приводится в действие непосредственно вручную, применяют преимущественно только для аппаратов цепей управления, осуществляющих распорядительноинформативные функции, а также различных разъединителей, переключаемых в обесточенном состоянии. Последние необходимо переключать вручную по условиям безопасности для того, чтобы машинист убедился в том, что произведенное им переключение действительно состоялось.Все исполнительные аппараты, осуществляющие переключения в высоковольтных цепях, выполняют с дистанционными приводами (приводы с дистанционным управлением), срабатывающими по сигналам цепей управления. В эти же цепи включены приводы коммутационных датчиков различных показателей (реле и др.). По принципу действия приводы с дистанционным управлением могут быть электромагнитными, электропневматическими, двигательными и даже гидравлическими.
Различают приводы и по их быстродействию. Быстродействующие приводы имеют минимально возможное время срабатывания. Для аппаратов оперативной коммутации время срабатывания приводов не имеет существенного значения. У приводов с выдержкой времени срабатывание искусственно задерживается.
Приводы аппаратов бывают индивидуальные (отдельный привод на одно контактное соединение коммутируемой цепи) и групповые (один привод к нескольким контактным соединениям коммутируемых цепей). Различают приводы и по числу фиксированных позиций. Для индивидуального привода возможны только две позиции (состояния): включено и выключено. У групповых приводов число позиций может быть различным: от 2 до 30—40. Многопозиционные приводы имеют или одну так называемую прямую последовательность переключений, или же две: прямую и обратную.
Силы, действующие на привод. Свойства привода определяются статикой и динамикой аппарата. Изменения соответствующих характеристик при поступательном движении рассматривают в зависимости от перемещения х, а при вращении — в зависимости от угла поворота а.
Статические
характеристики предполагают рассмотрение
сил и моментов при различных фиксированных
(статических) состояниях или при очень
медленном движении, когда dx/dt→0;
 ,
и при вращении, когда dα/dt→0;
,
и при вращении, когда dα/dt→0;
 .
.
Рассматривают
соотношения сил и моментов. В общем
случае силы можно разделить на те,
которые вызывают движение
 и
те, что препятствуют ему, т. е. силы
сопротивления движению
и
те, что препятствуют ему, т. е. силы
сопротивления движению
 .
Аналогично для вращения это соответственно
моменты
.
Аналогично для вращения это соответственно
моменты
 и
и
 .
Так, при включении простейшего контактора
или другого подобного аппарата:
.
Так, при включении простейшего контактора
или другого подобного аппарата:


где
 — соответственно сила и момент пружины;
— соответственно сила и момент пружины;
 ,
,
 — соответственно силы трения и
создаваемые ими моменты.
— соответственно силы трения и
создаваемые ими моменты.
В зависимости от
конструкции и расположения подвижных
частей аппарата к значению
может добавиться еще и вес подвижной
части аппарата
 .
При включении аппарата
.
При включении аппарата
 =
,
где
— единственная сила, развиваемая
приводом аппарата. Это же относится и
к вращающим моментам
=
. При
=
или
=
,
где
— единственная сила, развиваемая
приводом аппарата. Это же относится и
к вращающим моментам
=
. При
=
или
 =
=
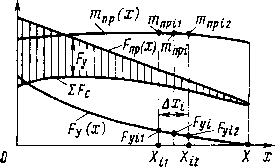
Рис. 4.1. Статические характеристики выключения электроаппарата
подвижная система может находиться в состоянии равновесия, быть неподвижной или, что маловероятно, двигаться с постоянной скоростью. Для включения аппарата необходимо, чтобы
 α,
α,
И
- =
= ,
,
где
 ,
,
 — соответственно приведенная масса и
приведенный момент инерции подвижной
части аппарата; α,
g
— соответственно ее поступательное и
угловое ускорение.
— соответственно приведенная масса и
приведенный момент инерции подвижной
части аппарата; α,
g
— соответственно ее поступательное и
угловое ускорение.
Рассмотрим статическую характеристику выключения электроаппарата (рис. 4.1). Движущей является сила пружины = . При этом
 (x)=
(x)-
(x)=
(x)- .
.
Ускоряющая сила (x) по мере выключения аппарата (увеличение перемещения х) снижается и при полном размыкании становится равной нулю. (Гашение кинетической энергии, накопленной подвижной системой при движении, не учитывается; оно может быть оценено при анализе динамики системы.)
Решая задачи динамики тяговых аппаратов, прежде всего определяются в том, какими считать перемещения — поступательными или угловыми. При углах поворота до 20° (иногда 30°) обычно движение считают поступательным. Это распространяется на большинство коммутационных тяговых аппаратов с индивидуальным приводом. В аппаратах с групповым приводом углы поворота значительны, поэтому для них указанное допущение неприемлемо.
Принцип расчета приводов. Для решения как задач статики, так и особенно динамики очень важно выбрать точку, относительно которой рассматриваются все перемещения. Обычно за нее принимают точку приложения силы привода к подвижной системе. К этой точке приводятся все силы, вращающие моменты, массы, моменты инерции.
Приведение основных
показателей к исходной точке. Для
безударных механизмов с этой целью
используют уравнения кинетической
энергии
 .
Так, для приведения массы можно
записать
.
Так, для приведения массы можно
записать
 (4.1)
(4.1)
Отсюда
 =
= .
.
где n
— общее число элементов подвижной
системы; — масса каждого элемента;
 ,
,
 — скорость соответственно в точке
приведения и в центре массы каждого
элемента.
— скорость соответственно в точке
приведения и в центре массы каждого
элемента.
Исходя из кинематической
схемы рассматриваемого аппарата
отношение скоростей обычно можно
заменить отношением геометрических
размеров. Например, при повороте системы
относительно какой-либо общей точки
скорость
пропорциональна
 т.е. расстоянию от этой точки до i-го
центра массы. При этом
т.е. расстоянию от этой точки до i-го
центра массы. При этом
≅
Если неизвестно
положение центра массы i-го
элемента относительно любой точки
в трехмерном пространстве (например,
точки О), его можно найти, разбив элемент
на простейшие геометрические
составляющие, для которых центры
массы определяются по законам симметрии,
а сами массы
 ,
где
,
где
 — объем соответствующего элемента;
— объем соответствующего элемента;
 — его плотность.
— его плотность.
При этом mt = 2<7уг7г,
а координаты
 ,
,
 ,
,
 центра массы относительно точки О
в трехмерном пространстве:
центра массы относительно точки О
в трехмерном пространстве:
=( ;
;
 )/
)/
 )/
.
)/
.
Чаще задачу удается решать в двухмерном пространстве благодаря симметрии деталей. Тогда
 .
.
Значение определяют при различных перемещениях подвижной системы, так как отдельные элементы взаимно смещаются. По точкам строят зависимость (х) (например, представленную на рис. 4.1). При вращении момент инерции относительно оси вращения
J= ,
,
где m
— масса всей системы;
 ,
,
 — радиус соответственно центра массы
элемента и инерции всей системы.
— радиус соответственно центра массы
элемента и инерции всей системы.
По аналогии с приведенной массой приведенный момент инерции
 =
= (4.2)
(4.2)
Значение J также определяют для различных значений α.
Решение основной задачи динамики. Такой задачей является определение скоростей и ускорений движения подвижной системы аппарата и собственного времени его срабатывания. Будем использовать основной закон изменения кинетической энергии — равенство ее изменений сумме работы всех сил, приложенных к механизму,