

Установка амортизаторов, выбор типоразмера амортизатора
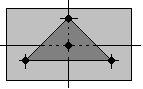
Амортизаторы ставятся под основанием. Координаты установки выбираются так, чтобы проекция центра тяжести блока находилась внутри треугольника, вершиной которого является проекция на основание точек крепления амортизаторов.
Верно |
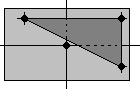
Неверно |
|
|
Выбор типоразмера амортизатора.
Амортизаторы классифицируются по типам и внутри каждого типа по типоразмерам. Конкретный тип амортизатора выбирается исходя из условий эксплуатации устройства. Конкретный типоразмер выбирается по статической нагрузке на амортизатор. В справочных данных приводятся либо номинальные нагрузки на амортизатор, либо диапазон нагрузок. В этом случае, если задано:
Pном, то Pmin = 0,7Pном; Pmax = 1,3Pном
Выбор типоразмера амортизатора проводится на основании следующего неравенства: Pmin < Pi < Pmax, т.е. расчетная реакция должна лежать в диапазоне Pmin … Pmax.
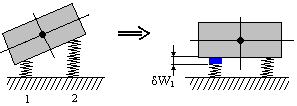
Выравнивание блока в положение равновесия
|
|
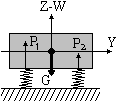

Используя условия выбора амортизатора, получаем: P1 – типоразмер №1, P2 – типоразмер №2.
|
Для
каждого амортизатора существует
статическая характеристика. Реакция
P1
возникает при деформации W1,
P2
– при W2,
следовательно блок установлен с
перекосом. Для устранения этого
перекоса необходимо поставить
прокладку толщиной
|
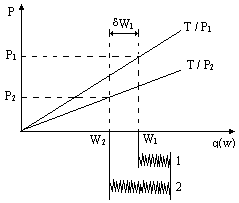
 .
.
Для трех амортизаторов
|
Если реакции лежат в одном диапазоне, то мы берем один и тот же тип амортизатора. Расчет ведем по минимальной деформации.
|

Если установлены разные амортизаторы, необходимо дополнительно учитывать при расчете толщины прокладки первоначальную разницу габаритных размеров и амортизаторов.
Динамический расчет
22 Жесткостные и инерционные параметры систем виброизоляции
Определение инерционных и жесткостных параметров системы.
Определение инерционных параметров.
mi масса – инерционный параметр системы при поступательном движении;
Ixx, Iyy, Izz – моменты инерции при поворотном движении;
m – определяется суммирование масс различных частей, узлов, деталей блока.
Iii – собственный момент инерции всего блока относительного его центральных осей. Они определяются следующим образом:
– сумма собственных моментов инерции элементарных блоков относительно центров координатных осей этих блоков. Учитывая, что блоки простейших форм, их моменты инерции рассчитываются по таблицам.
– дополнительные моменты инерции, создаваемые блоком относительно координатных осей X, Y или Z .
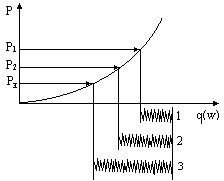
1.2 Жесткостные параметры системы.
Cg – суммарная жесткость системы (динамическая).
Представляется в виде суммы динамических жесткостей системы или поворотных жесткостей.
Динамические жесткости амортизаторов определяются по графикам динамической жесткости.
Эти графики сняты экспериментально. А – амплитуда вибрации основания.
Cgu – значение динамических жесткостей.
Характер зависимости – линейный. График дается для трех значений: Pmin, Pmax, Pmin. Зная график зависимости и амплитуду вибрации основания, можно говорить об определении значений динамических жесткостей амортизаторов. Если графика нет, то Cg = 1,1 … 1,2 C , где С – статическая жесткость, определяемая по графику статической жесткости.
Динамическая жесткость системы определяется только через динамические жесткости амортизаторов и не может быть изменена при выбранном типоразмере амортизатора. Поворотная жесткость определяется еще и координатами установки амортизатора и может быть изменена за счет изменения этих координат.
1.3 Определение парциальных частот.
Парциальные частоты определяются через инерционные и жесткостные параметры системы.
Определение собственных частот системы амортизации.
Собственные частоты системы амортизации определяются через парциальные частоты с учетом наличия плоскостей симметрии.
Расчет коэффициента динамичности.
- собственная частота;
- воздействующая частота;
m - масса блока;
kg - коэффициент демпфирования, который определяется по графику (график экспериментальный для различных нагрузок на амортизатор);
|
- в закрытой области. |
- сумма по всем амортизаторам по соответствующим индексам.
В зарезонансной зоне можно принять так:
В резонансной зоне – очень сильная зависимость.
Для уменьшения коэффициента динамичности в резонансной зоне необходимо увеличить Kg. Для этого в системе предусматривается максимальная связность перемещений, т.е. отсутствие плоскостей симметрии.
Определение ускорения объекта.
Ориентировочно оценку коэффициента динамичности можно вести по АЧХ амортизатора.
Замечание: jоб – ускорение центра тяжести объекта. В некоторых точках блока за счет поворотных движений ускорение может быть больше.
23 Свободное движение блока на виброизоляторах, использующих силы вязкого трения.