

Моделирование элементов систем автоматического управления электроприводом
Модели регуляторов для замкнутых систем электропривода
Для регулирования координат электропривода в замкнутых системах наиболее часто используются пропорциональные (П), пропорционально-интегральные (ПИ) и релейные регуляторы.
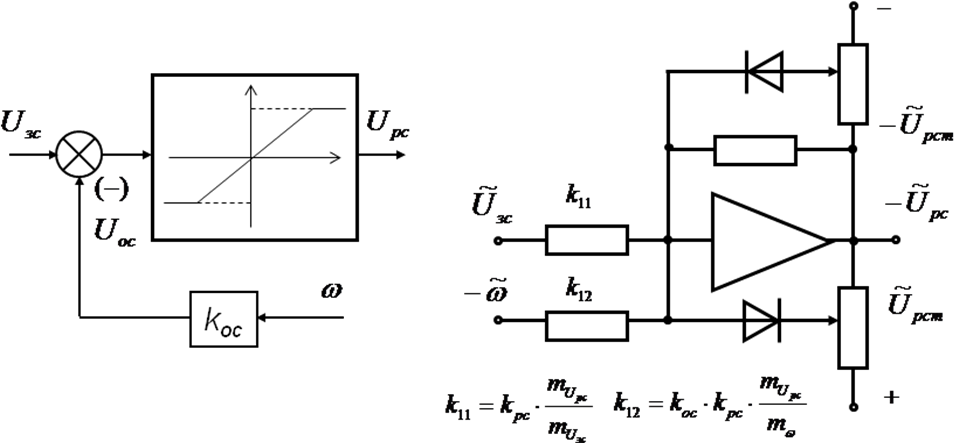
П-регулятор с ограничением
Пропорциональные регуляторы часто включаются в контур регулирования скорости замкнутых систем электропривода. При этом обычно требуется ограничивать напряжение на выходе такого регулятора

![]()
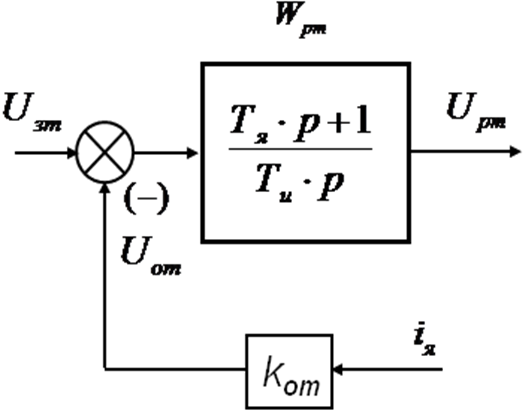
ПИ-регулятор.
В замкнутых системах ЭП с подчиненным регулированием координат используются ПИ-регуляторы тока.




![]()
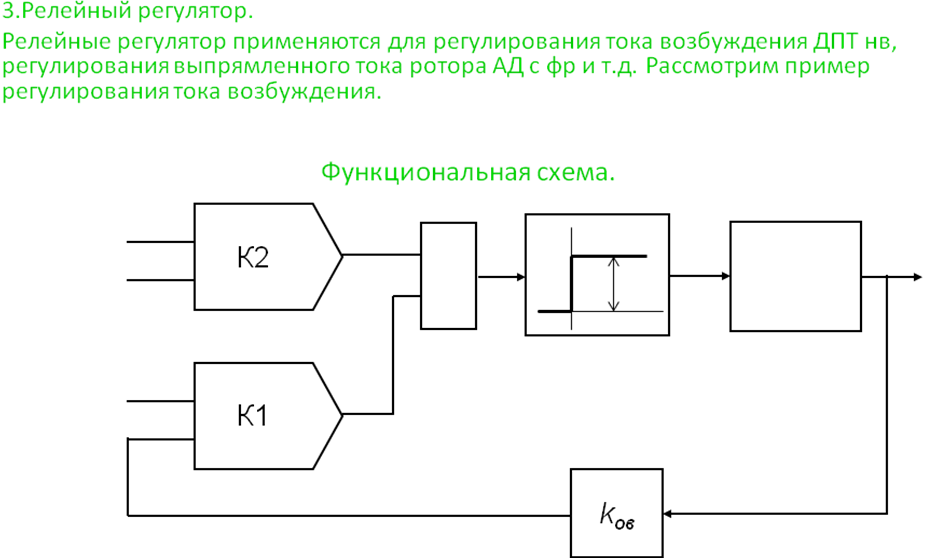
Указанную логическую операцию в схеме выполняет элемент ИЛИ. В АВК используются логические элементы И-НЕ, в качестве релейного регулятора – реле KV.
Е![]()
![]()
![]() сли
ток якоря меньше тока отсечки на выходе
К2 «0» и реле KV
работает в зависимости от соотношения
сигналов и
сли
ток якоря меньше тока отсечки на выходе
К2 «0» и реле KV
работает в зависимости от соотношения
сигналов и
При на выходе К1 «1» и KV замкнуто


