

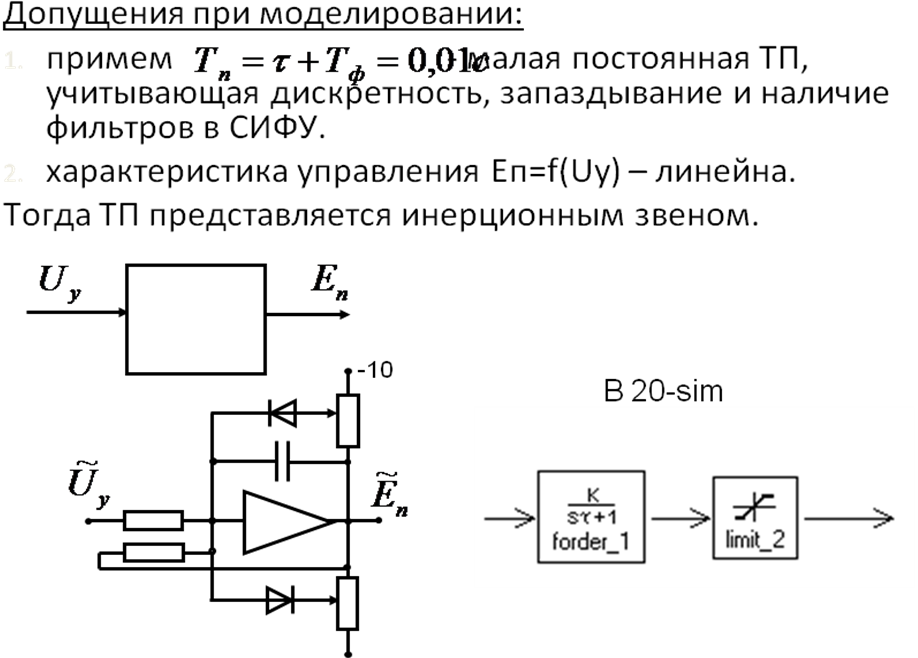
Тиристорный преобразователь
Тиристорный преобразователь как элемент системы регулирования можно подразделить на три звена:

ВОПРОС №15.
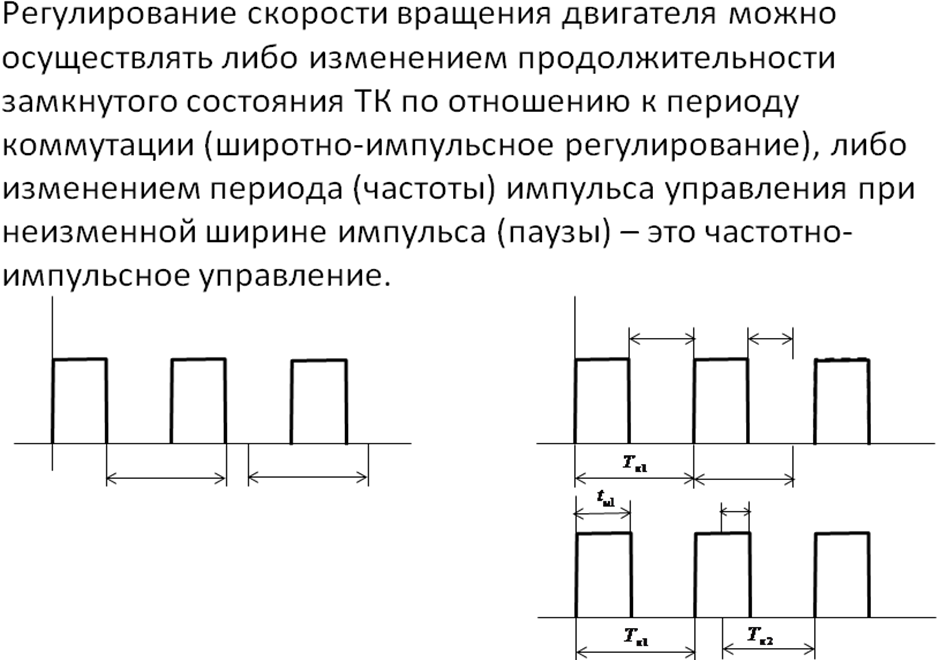
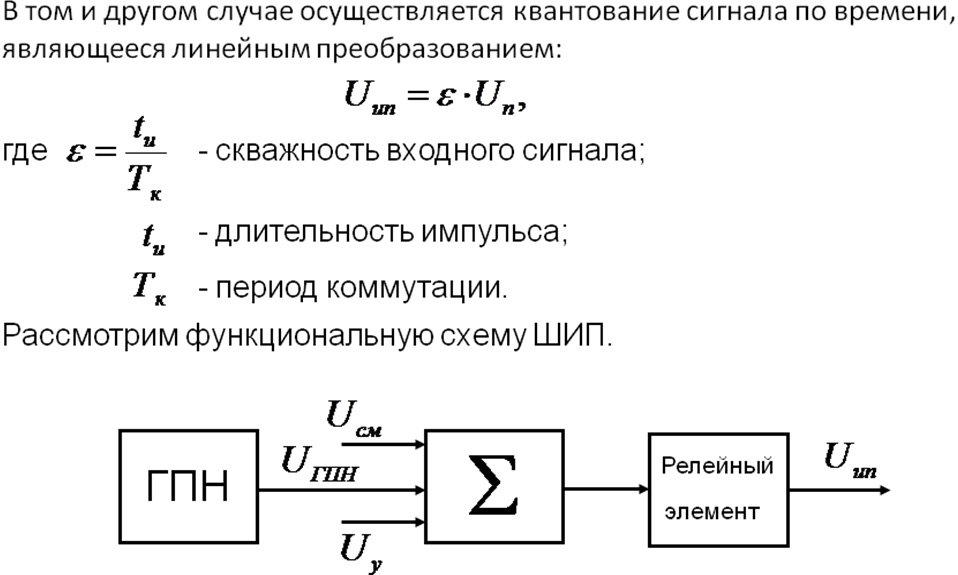
Широтно-импульсный преобразователь
ШИП часто применяется для питания ДПТ.

В период замкнутого состояния ТК якорь двигателя получает питание. После размыкания ключа под действием ЭДС самоиндукции в цепи якоря продолжает протекать ток, замыкаясь через диод VD.
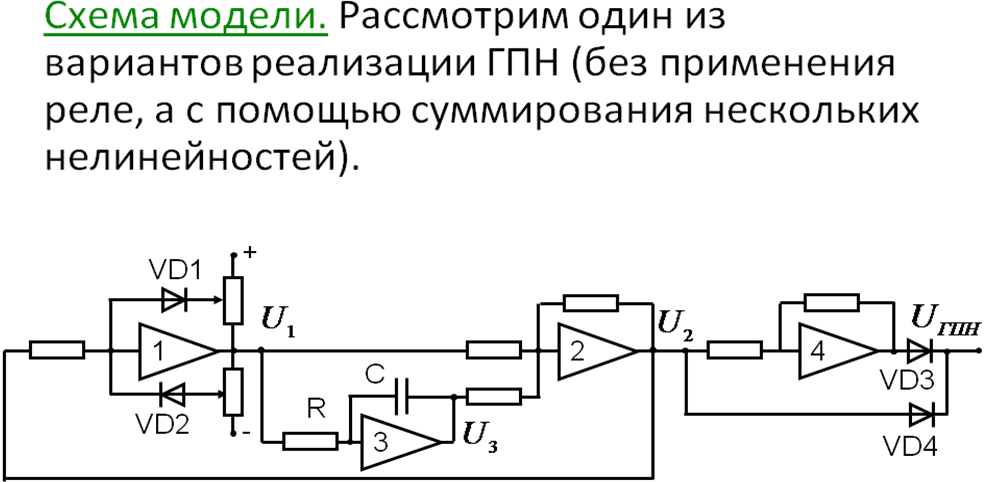

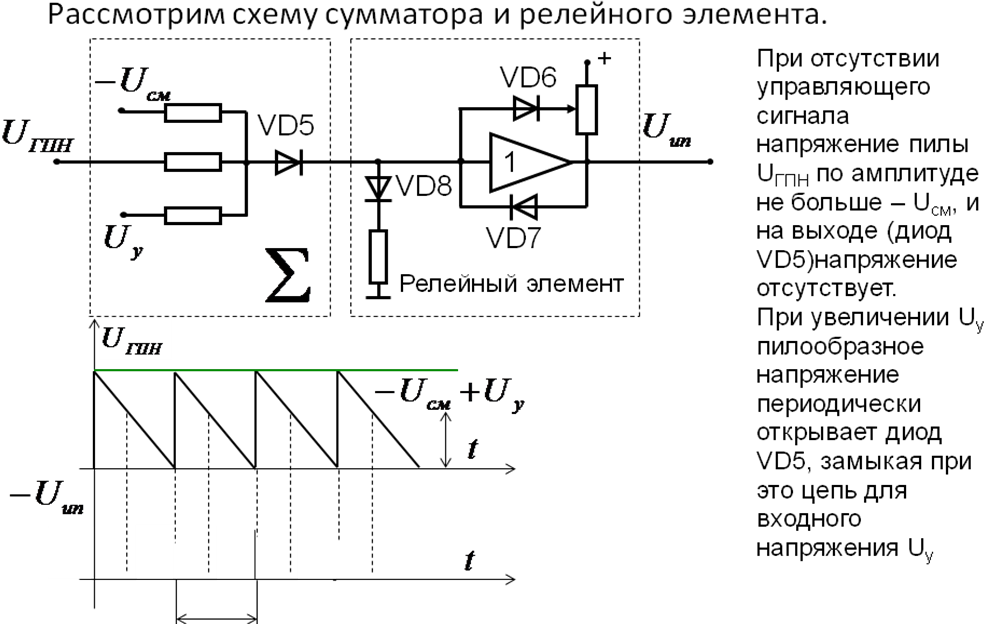
В момент времени, когда U3 превысит U1, сигнал с выхода сумматора положительной полярности перебрасывает релейный элемент (ОУ1) во второе устойчивое состояние, что соответствует появлению с выхода этого ОУ отрицательного напряжения. При этом интегратор начинает разряжаться, а затем перезаряжаться опять-таки до момента равенства напряжений U1 и U3 и т.д.
Разнополярный сигнал с выхода ОУ2 поступает на схему образования модуля, на выходе которой формируется одназначно меняющееся пилообразное напряжение.
А![]() мплитуда
колебаний UГПН
определяется установкой потенциометра
ОУ1. Частота колебаний, которая определяется
заданной частотой коммутации ШИП,
зависит от настройки параметров
интегратора 3
мплитуда
колебаний UГПН
определяется установкой потенциометра
ОУ1. Частота колебаний, которая определяется
заданной частотой коммутации ШИП,
зависит от настройки параметров
интегратора 3
![]()
ОУ 5 работает в релейном режиме. Ограничение в цепи обратной связи усилителя выполнено с помощью двух диодов, один из которых VD6 включен последовательно с источником опорного напряжения, а другой – VD7 присоединен непосредственно между входом и выходом усилителя.
Такая схема включения обратной связи, а также наличие цепи с диодом VD8 уменьшает нестабильность нулевого уровня на входе ОУ5.
Из рассмотрения приведенных диаграмм можно сделать вывод, что в данной модели реализуется принцип вертикального управления.
П![]() ри
составлении модели ШИП можно учесть
инерционность коммутатора, пропустив
сигнал Uу
через инерционное звено с передаточной
функцией
ри
составлении модели ШИП можно учесть
инерционность коммутатора, пропустив
сигнал Uу
через инерционное звено с передаточной
функцией
где ТТК – постоянная времени коммутатора, учитывающая постоянную времени фильтра на входе системы управления, длительность переходных процессов узла искусственной коммутации, среднестатистическое запаздывание преобразователя.
ВОПРОС №13.
Моделирование механической части электропривода
При построении моделей и выявления их места в научном исследовании необходимо прежде всего установить цель исследования, сформулировать допущения и выделить из бесконечного множества подсистем и процессов, составляющих систему и происходящие в ней явления, те, которые подлежат изучению.
То есть нельзя охватить все многообразие процессов, составляющих явление: необходимо выделить из него те процессы, которые интересуют исследователя в данной постановке задачи.
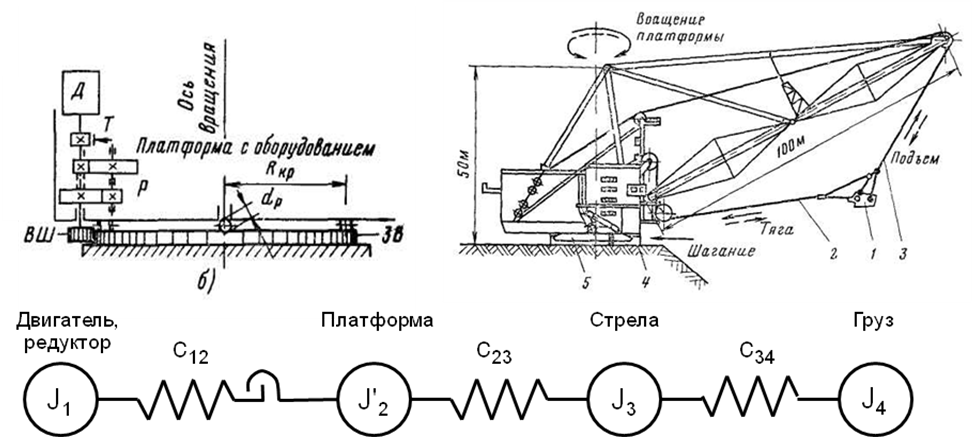
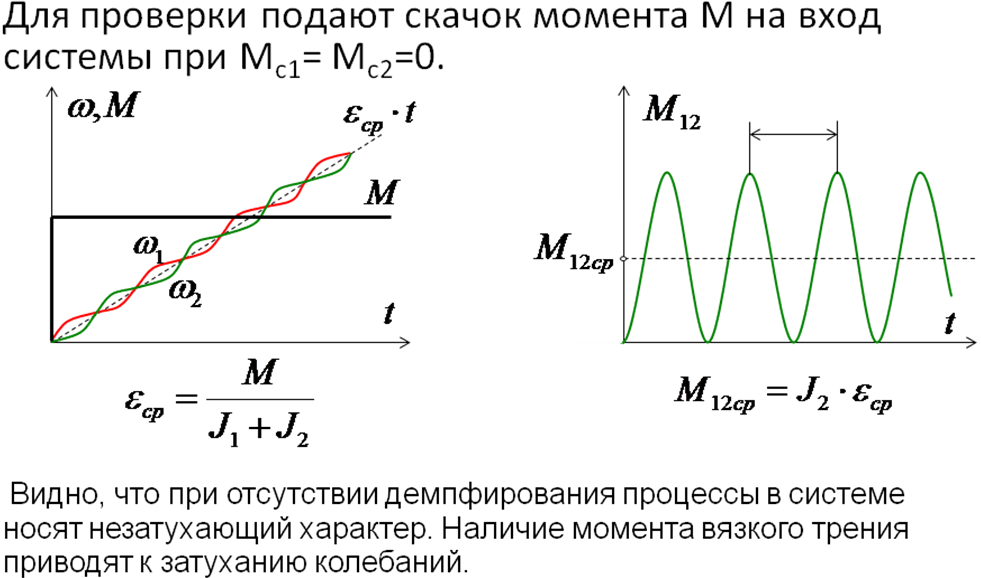
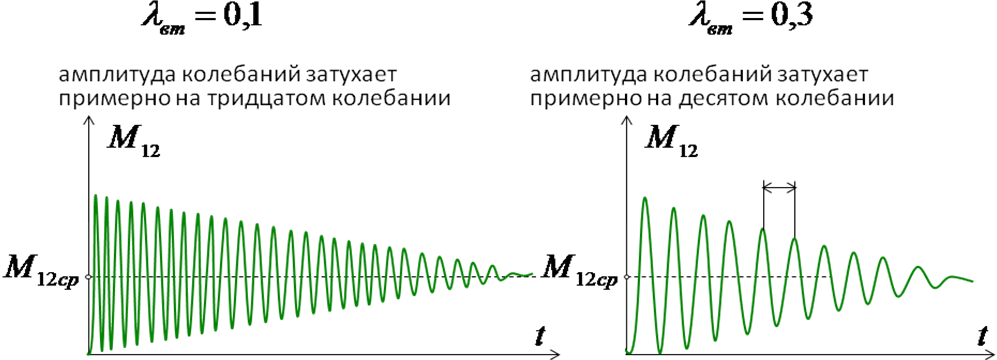
В общем случае механическая часть электропривода представляет собой систему связанных масс, движущихся с различными скоростями вращательно или поступательно. При нагружении элементы системы (валы, опоры, ременные передачи, канаты, зубчатые зацепления т.п.) деформируются, т.к. механические связи не являются абсолютно жесткими.
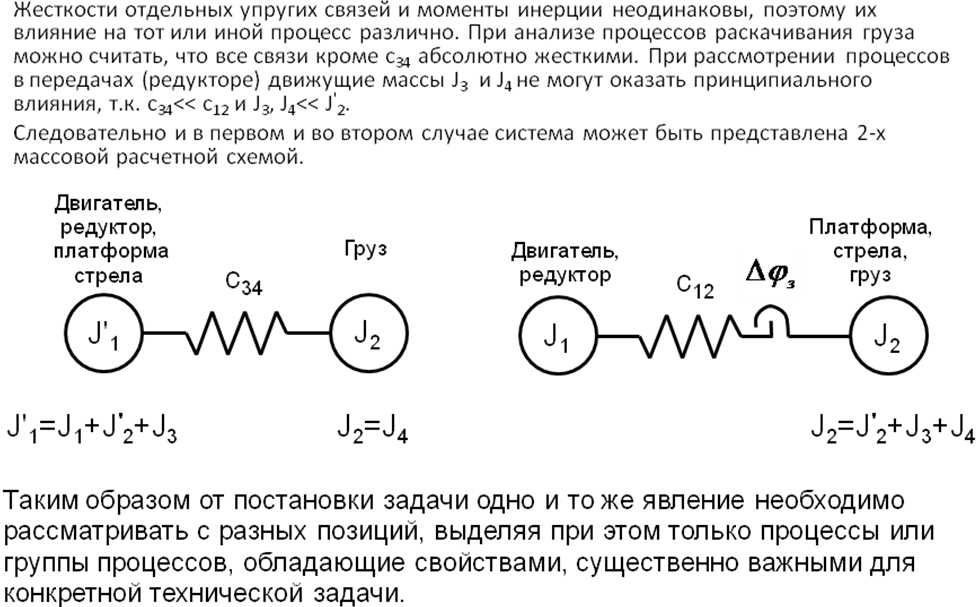
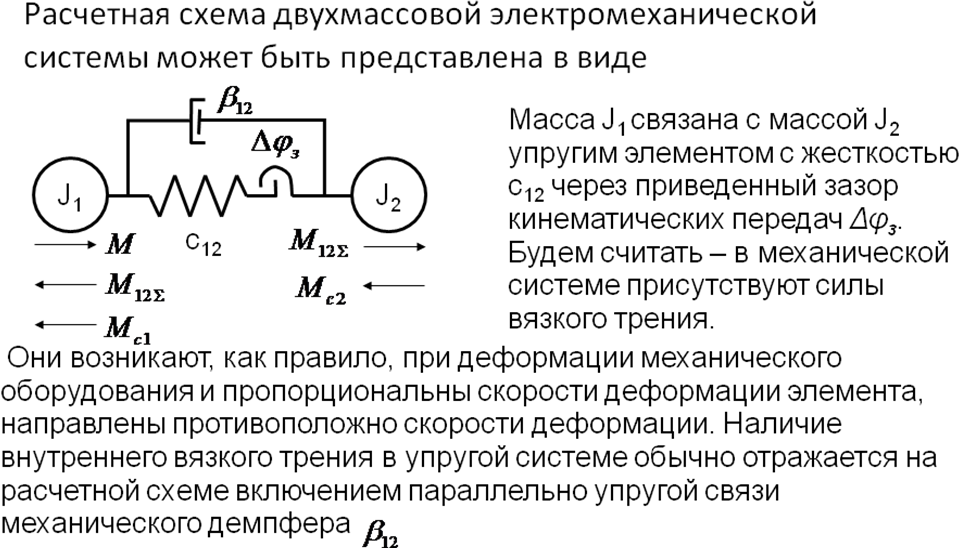
Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей. Поэтому одной из первых задач при исследовании механической части ЭП является составление упрощенных расчетных схем, учитывающих возможность пренебрежения упругостью достаточно жестких механических связей и приближенного учета влияния малых движущихся масс.
Рассмотрим для примера многомассовую систему механической части электропривода поворота экскаватора-драглайна

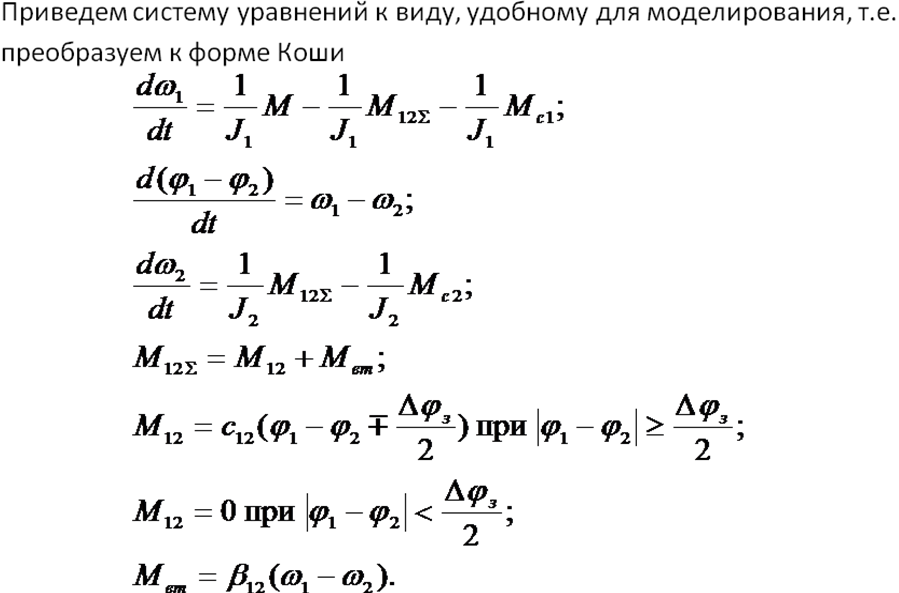
П ерейдем
к машинной форме записи, используя
соотношения связи реальных и машинных
коэффициентов
ерейдем
к машинной форме записи, используя
соотношения связи реальных и машинных
коэффициентов

ВОПРОС №17.