

Моделирование дпт нв при ослаблении потока возбуждения

![]()
а![]() при введении добавочного сопротивления
при введении добавочного сопротивления
Связь между потоком и током возбуждения определяется кривой намагничивания
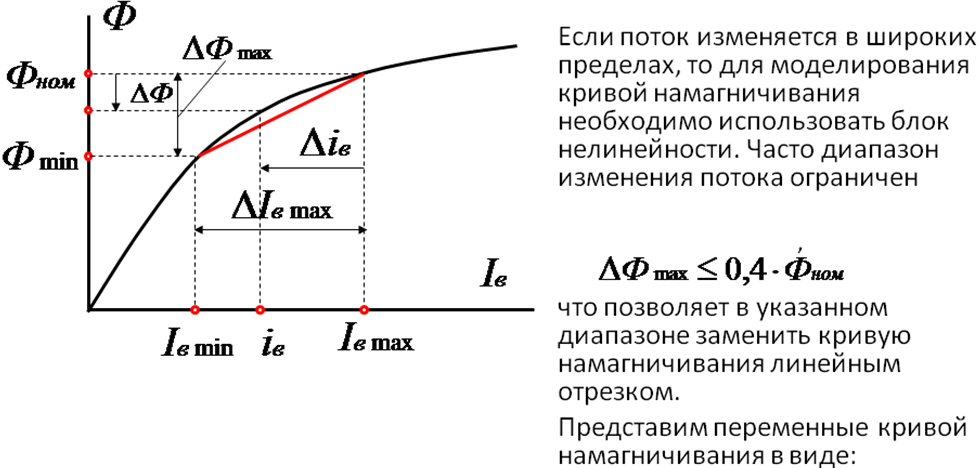

Для линеризованного
участка кривой намагничивания
связь между
потоком и током возбуждения определяется коэффициентом

![]()
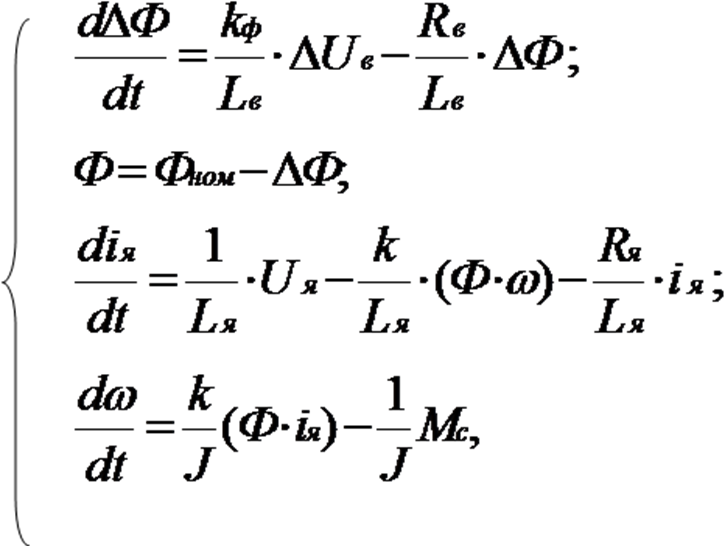
Учитывая выражение для ΔФ, запишем систему уравнений, описывающую переходные процессы ДПТ нв при регулировании потока изменением напряжения на его ОВ
![]()



Максимальные значения переменных цепи возбуждения при выборе масштабов определяются следующим образом:

ВОПРОС №16.
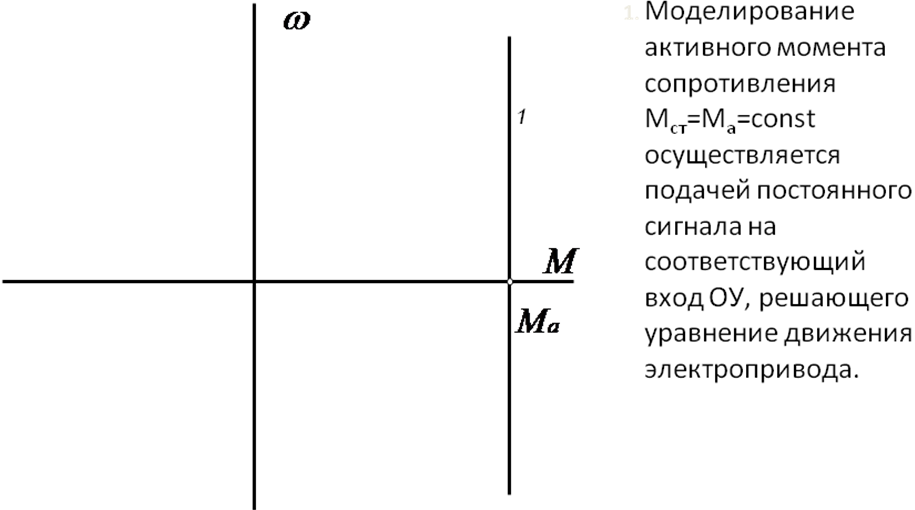
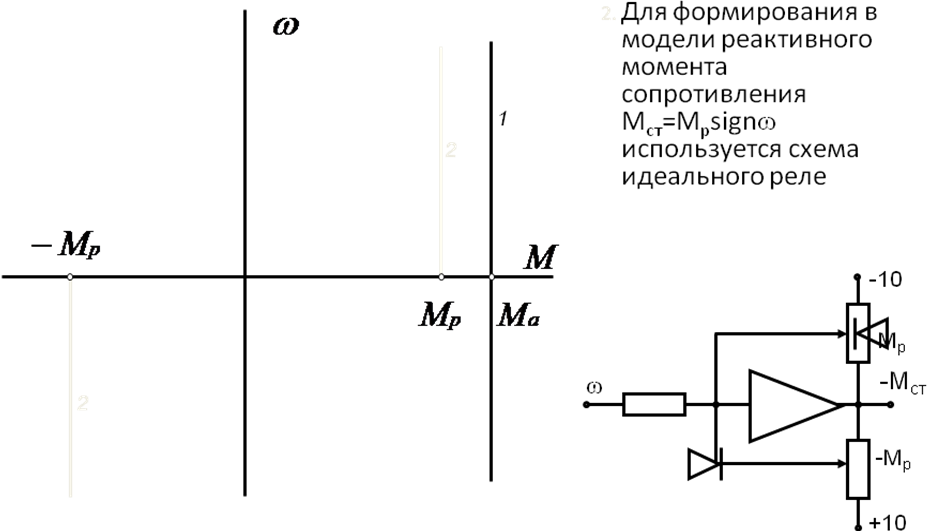
Моделирование статических нагрузок электроприводов
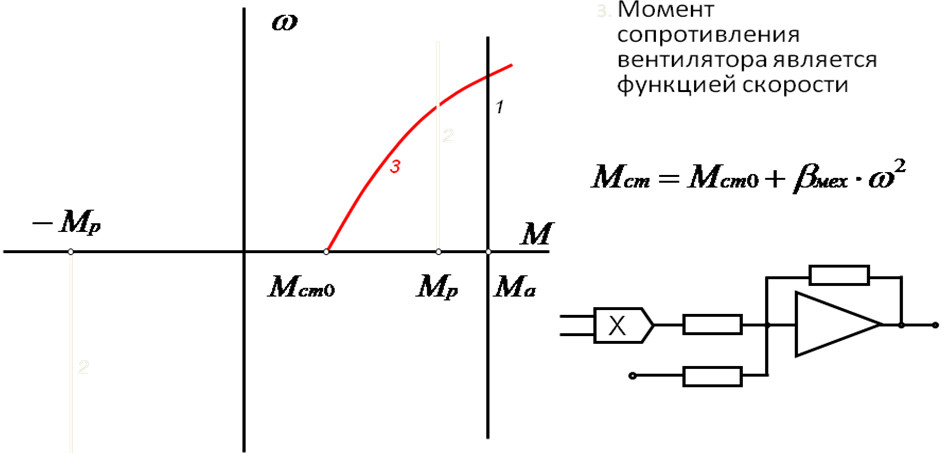

ВОПРОС №12.
Моделирование электропривода с шаговым двигателем
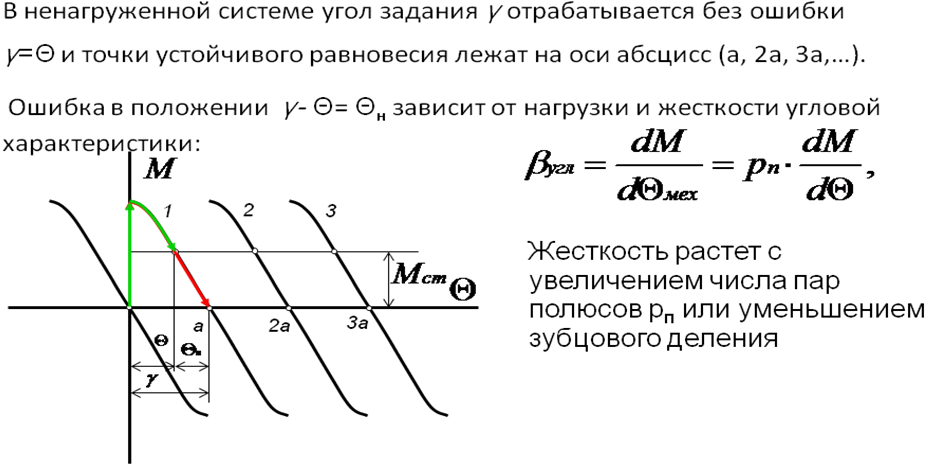
Поступление команды вызывает шаговое смещение характеристики, а возникающая при этом сила переводит систему в новое, смещенное на шаг положение равновесия. В зависимости от свойств системы этот переход сопровождается колебаниями или осуществляется апериодически.
Электропривод, обеспечивающий преобразование чисел или кодов электрических состояний в дискретные механические положения, называется шаговым электроприводом. Шаговый ЭП осуществляет суммирование отдельных шагов и запоминает любое механическое состояние с точностью до ошибки, которая не накапливается и имеет ограниченную величину, зависящую от формы угловой характеристики.
Команда на выполнение очередного шага сообщается в виде электрического импульса или приращения цифрового кода, изменяющих электрическое состояние привода. Амплитуда и форма управляющего импульса могут в некоторых пределах изменяться.
Используемыми информационными признаками сигнала являются только число и частота команд. Шаговый ЭП реализует преобразование числа команд в путь N∙a=Θ, а частоты команд – в среднюю на шаге скорость fу∙а=ωср с запоминанием, т.е. фиксацией конечных координат любого перемещения.
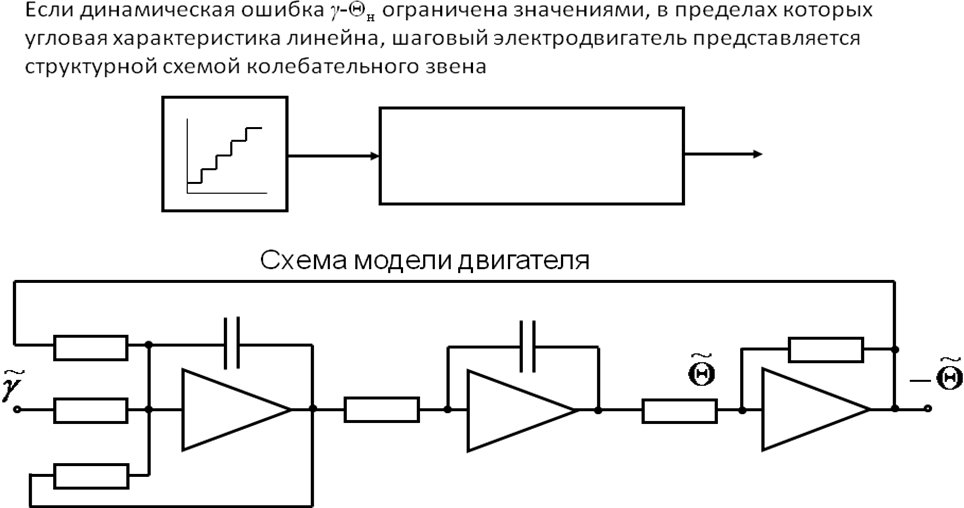
Схема модели устройства управления, формирующего ступенчатую функцию времени.

ВОПРОС №10.
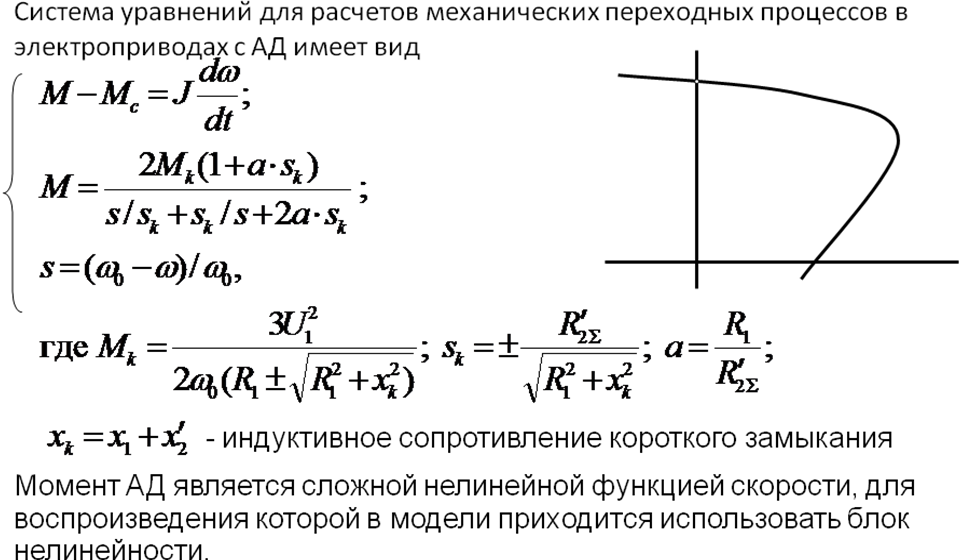
Моделирование механических переходных процессов ад
При моделировании механических переходных процессов считаем, что электромагнитные переходные процессы не оказывают влияния. Такое допущение возможно при условии, что Тэ<<Тм. Т.е. электромагнитные процессы в АД заканчиваются значительно быстрее, чем происходит изменение скорости двигателя.


ВОПРОС №11.
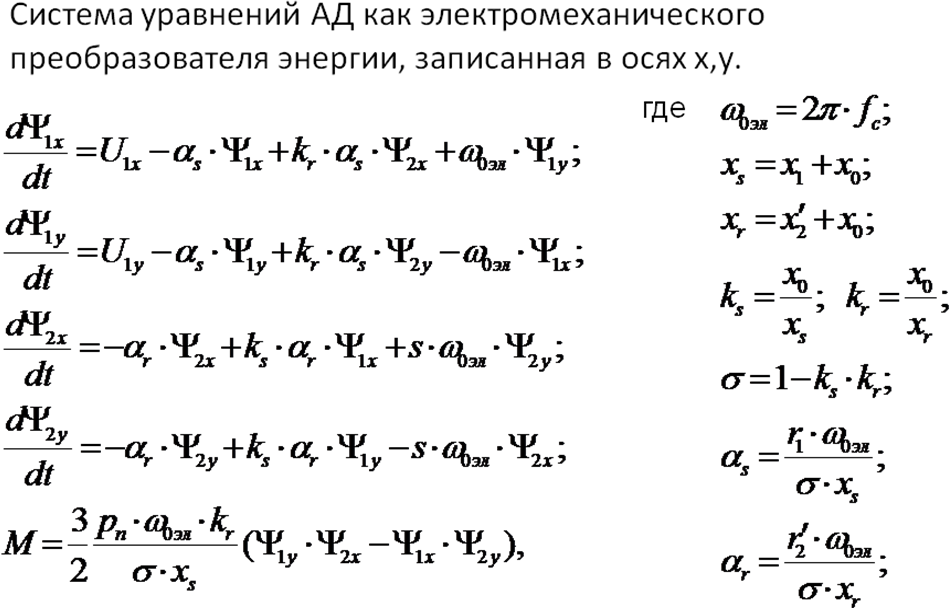
Модель для расчета электромагнитных переходных процессов ад
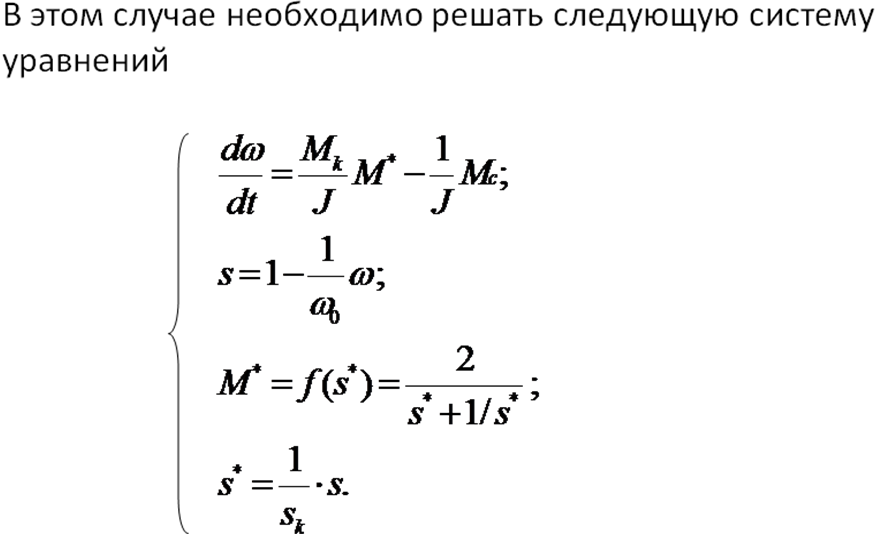
Данная модель учитывает электромагнитные переходные процессы, т.е. в этом случае поток двигателя не остается постоянным. Колебания потока вызывают в конечном счете колебания момента и скорости двигателя. При этом картина переходного процесса может существенно отличаться от вида механического переходного процесса, полученного на модели, использующей статическую механическую характеристику. Например, пуск АД с к.з. ротором

При моделировании машин переменного тока обычно принимаются следующие допущения:
магнитная цепь машины ненасыщена;
явление гистерезиса, вихревые токи и потери в стали отсутствуют;
магнитное поле каждой обмотки принимается синусоидальным, са воздушный зазор – равномерным;
ротор и статор в воздушном зазоре гладкие – не учитывается влияние пазов;
индуктивности рассеяния и активные сопротивления постоянны.
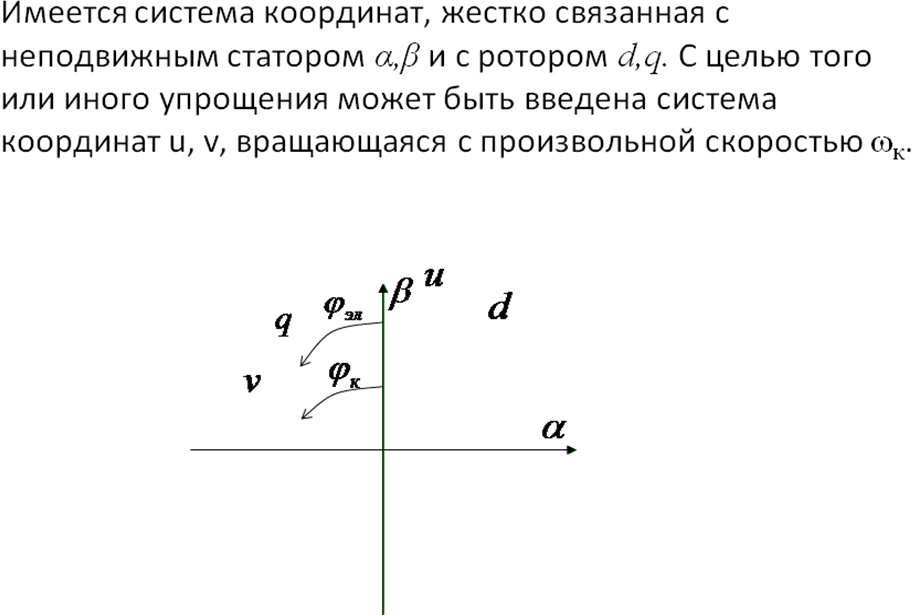
Известно, что система дифференциальных уравнений асинхронной машины, записанная относительно реальных фазных переменных, является достаточно сложной, т.к. характеризуется наличием периодических коэффициентов, учитывающих периодическое изменение взаимоиндуктивности между статорными и роторными обмотками вследствие вращения ротора.
При моделировании значительное упрощение математического описания процессов электромеханического преобразования энергии достигается путем линейных и фазных преобразований исходной системы уравнений. При этом осуществляется замена действительных переменных новыми при условии сохранения адекватности математического описания реальному объекту. Это условие – требование инвариантности мощности при преобразовании уравнений. В результате преобразований реальная 3-х фазная АМ приводится к обобщенной 2-х фазной АМ.



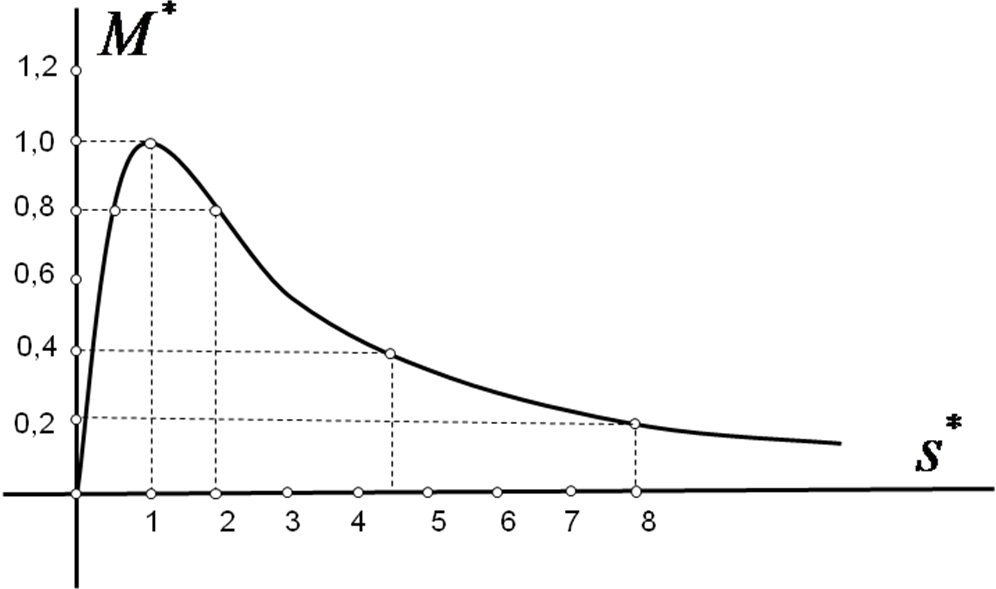
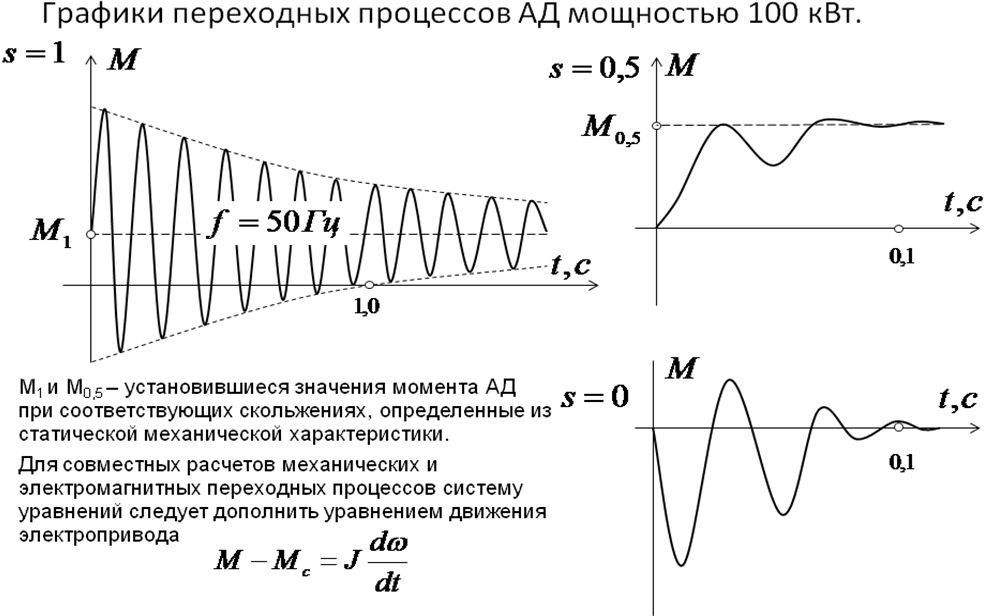
Проверку адекватности модели целесообразно проводить в два этапа. Сначала, задавая различные значения скольжений в диапазоне 0≤s ≤1 и измеряя установившееся значение напряжения на выходе усилителя, решающего уравнение для момента АД, определяют статическую механическую характеристику М=f(s) модели и сравнивают ее с расчетной.
Затем проверяют характер электромагнитных переходных процессов при нескольких значениях s=const.
ВОПРОС №14.