

Воспроизведение нелинейных зависимостей
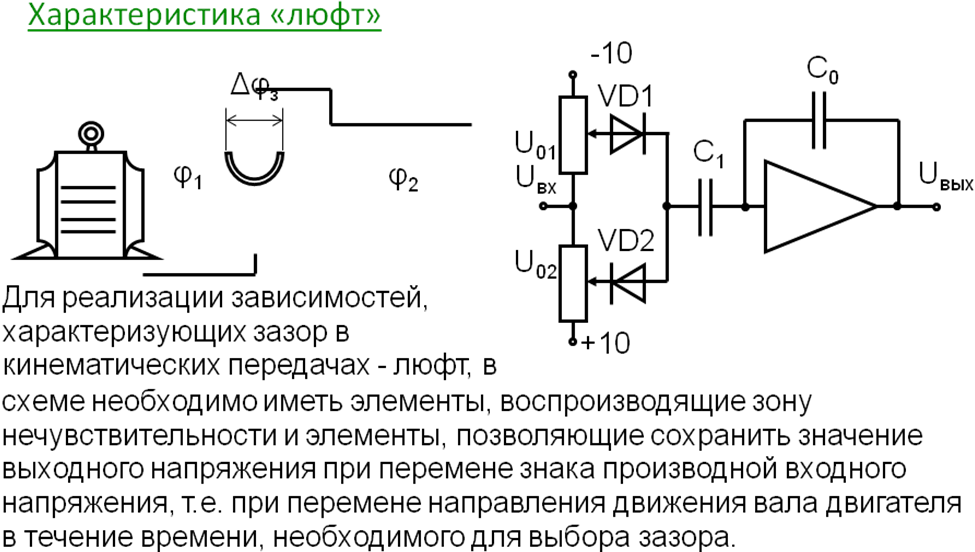
Характеристика «зона нечувствительности»
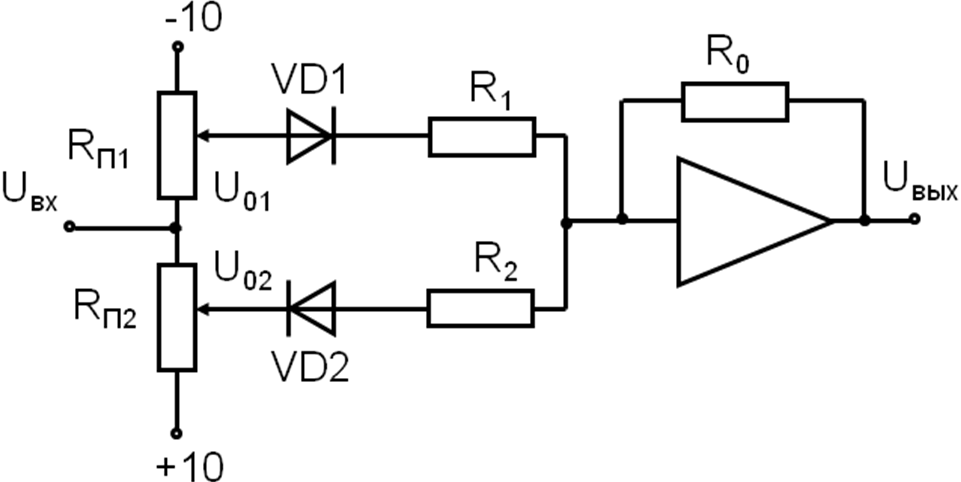


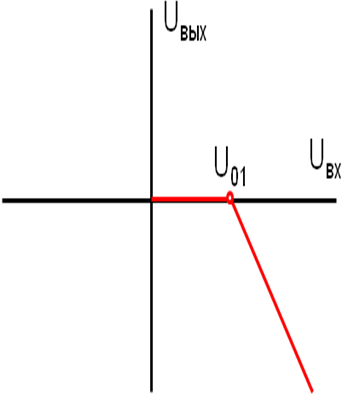
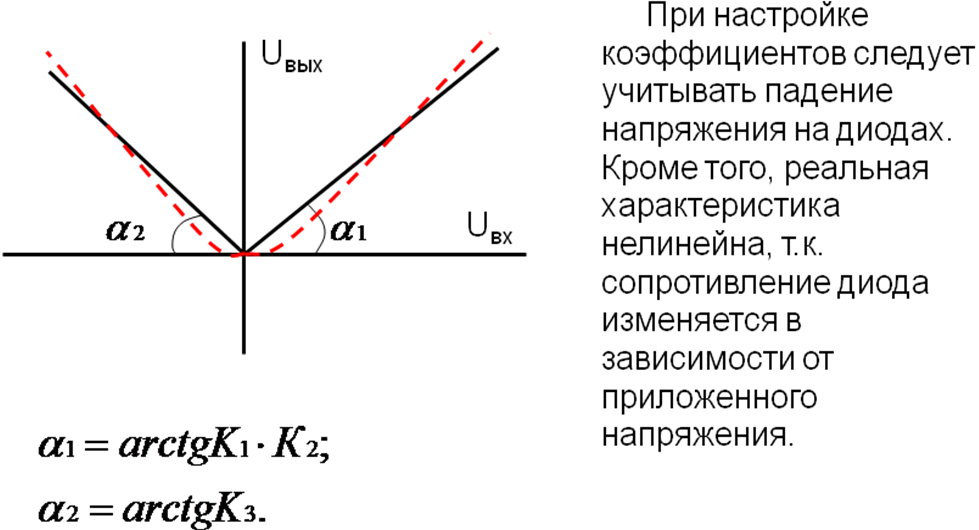
На делитель напряжения с одной стороны подается напряжение ±10 В, а с другой – выходное напряжение ОУ. При Uвх=0 диод VD1 (VD2) заперт некоторым отрицательным (положительным) напряжением. При Uвых1 (Uвых2) открывается VD1 (VD2),
при этом параллельно резистору R0 включается сопротивление, определяемое суммой части сопротивлений делителя напряжения и сопротивления проводящего диода Rд. Общая величина сопротивления обратной связи резко падает и становится весьма малой.
Следовательно становится близким к нулю коэффициент передачи ОУ. Т.к. R0>>(Rд+ Rп), то коэффициент передачи очень мал. Выходное напряжение можно считать постоянным, хотя при увеличении входного напряжения Uвых незначительно увеличивается. Величина требуемого напряжения ограничения устанавливается настройкой делителя Rп
![]()
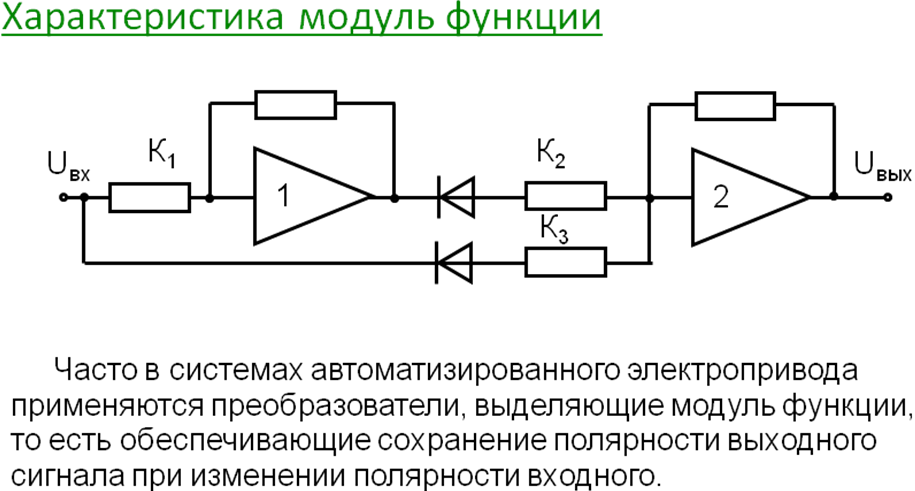
В качестве элемента, реализующего зону нечувствительности, обычно используют ДЭ, а в качестве запоминающего элемента – ОУ с конденсаторами во входной цепи и цепи обратной связи.
![]()


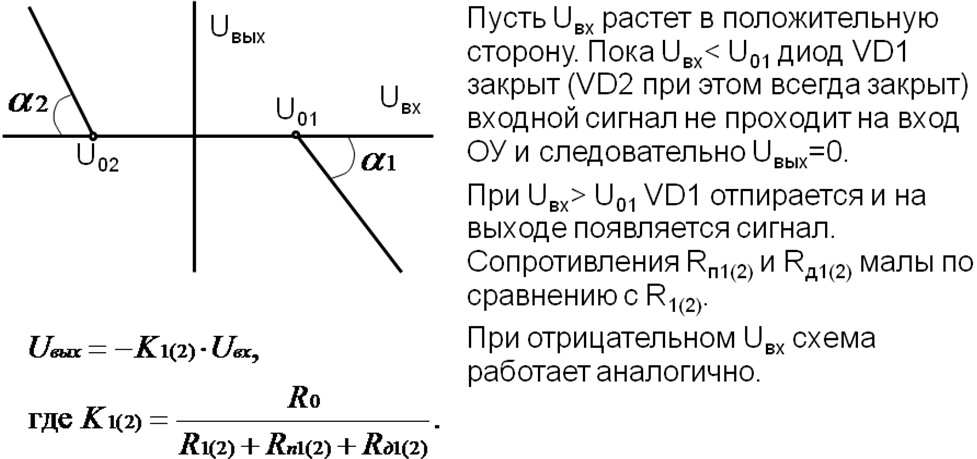
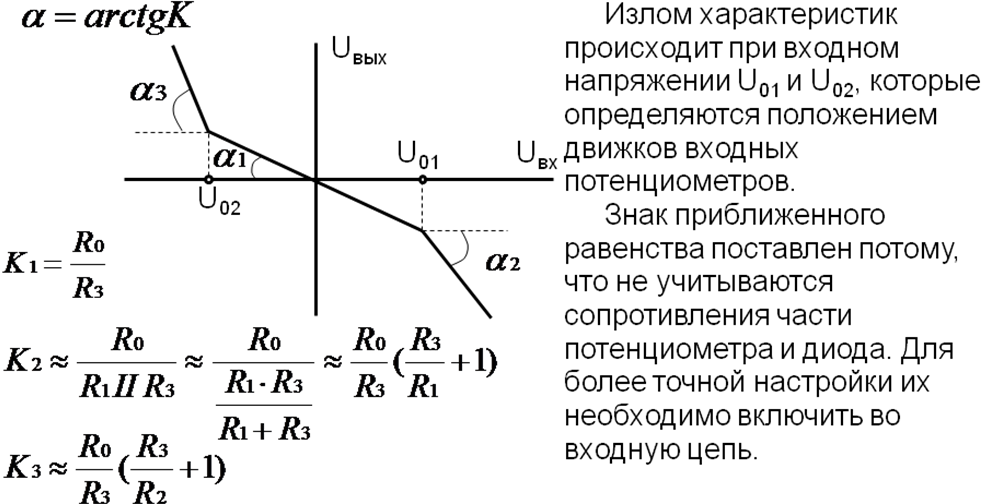
Предположим, что конденсаторы разряжены и Uвх изменяется от нуля в положительной области. Пока Uвх< U01 Uвых =0. При дальнейшем росте Uвх Uвых будет изменяться пропорционально коэффициенту передачи К.
Если в какой-то момент времени прекращается возрастание Uвх, то соответствующее Uвых остается неизменным, т.к. диоды заперты. Диод VD1 запирается напряжением Uc1= Uвх1, а VD2 – опорным напряжением положительной полярности со стороны катода. Это положение сохраниться при уменьшении Uвх до величины Uвх2
При этом откроется диод VD2, т.к. у него на аноде напряжение будет выше чем на катоде. При дальнейшем уменьшении Uвх напряжение на выходе будет меняться линейно, при этом конденсаторы С1 и С2 будут перезаряжаться и т. д.

ВОПРОС №7.
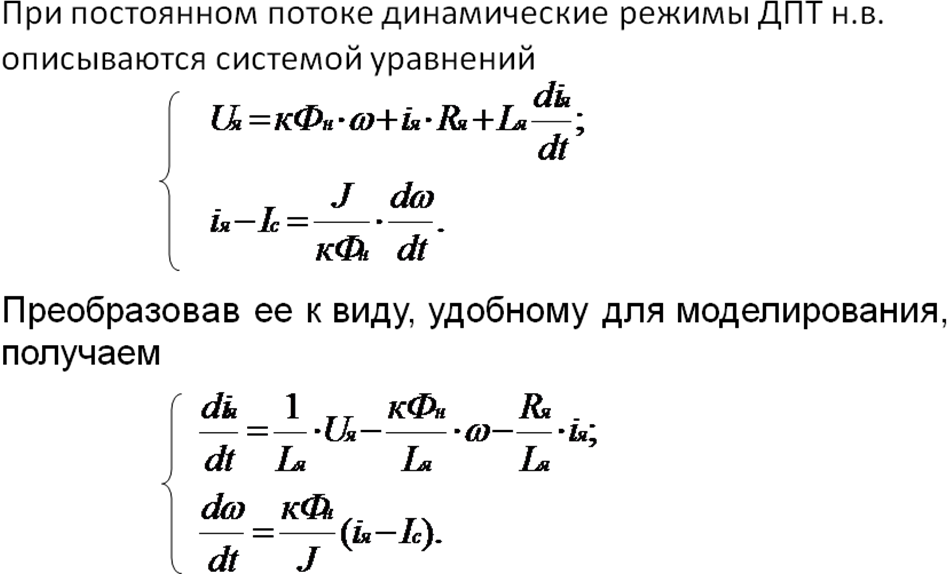
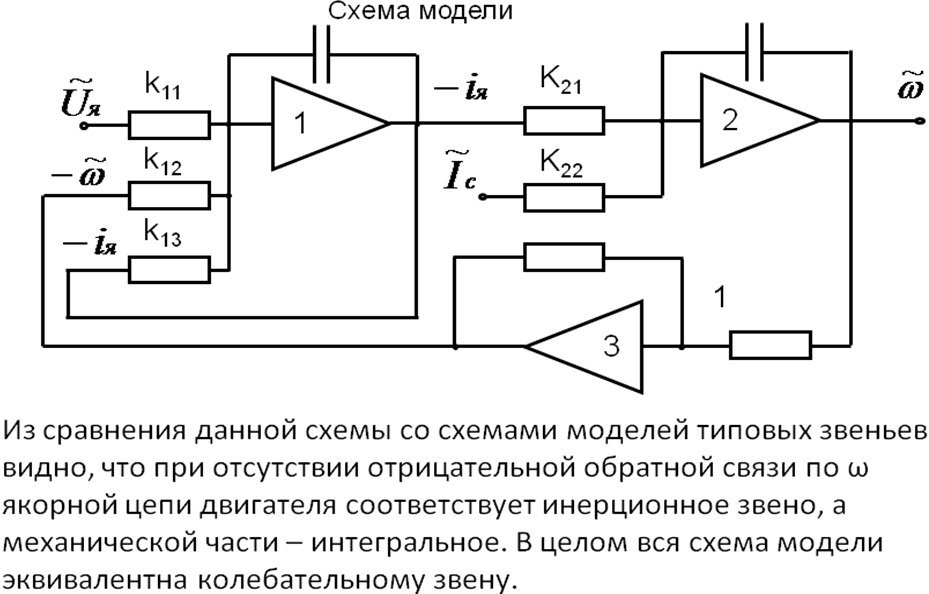
Моделирование двигателя постоянного тока независимого возбуждения



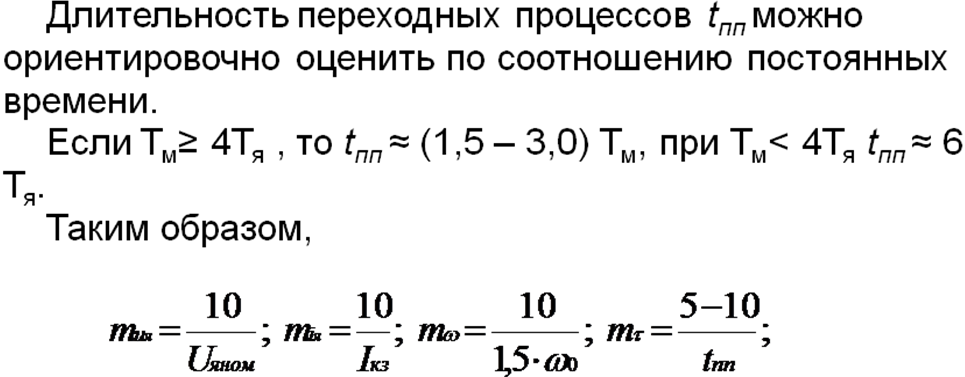
М![]() аксимальные
значения переменных, необходимые для
расчета масштабов, выбираются, исходя
из следующих соображений.
аксимальные
значения переменных, необходимые для
расчета масштабов, выбираются, исходя
из следующих соображений.

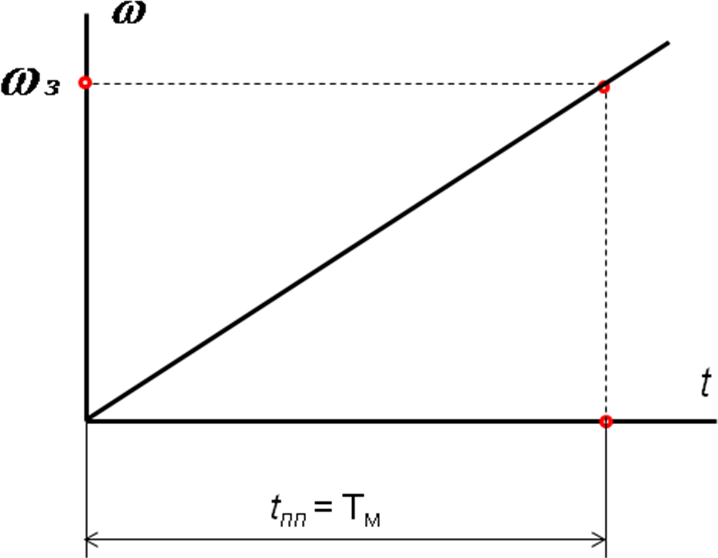
Проверка механической части.
П![]()
![]() ри
скачкообразном входном воздействии
интегратора (Iя=
const)
скорость двигателя изменяется по
линейному закону. При отсутствии момента
сопротивления на валу (Iс=0)
двигатель разгоняется до скорости
за время tпп
=Тм.
Задав на вход второго ОУ напряжение
выполняют расчет в течение
ри
скачкообразном входном воздействии
интегратора (Iя=
const)
скорость двигателя изменяется по
линейному закону. При отсутствии момента
сопротивления на валу (Iс=0)
двигатель разгоняется до скорости
за время tпп
=Тм.
Задав на вход второго ОУ напряжение
выполняют расчет в течение
![]()
в![]() ремени,
пока выходное напряжение не достигнет
уровня
ремени,
пока выходное напряжение не достигнет
уровня
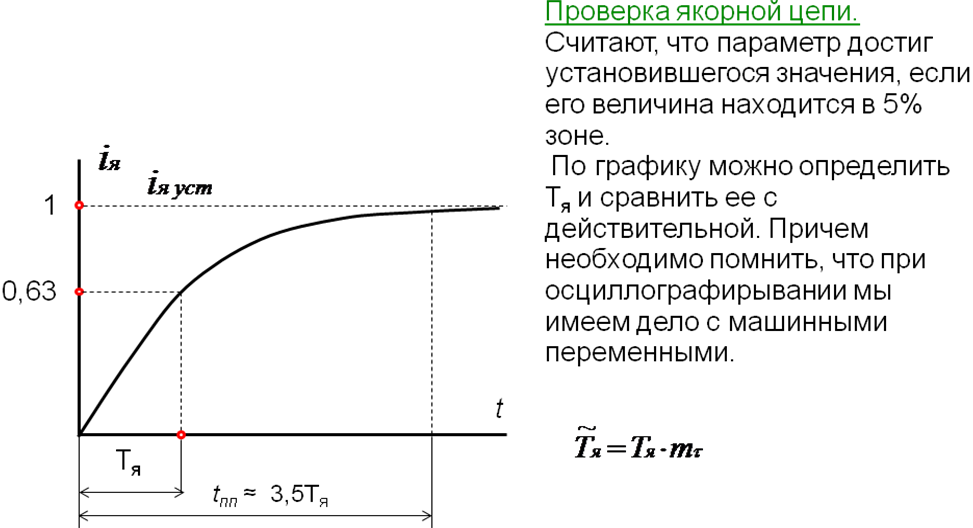
При правильной работе модели время расчета равно

ВОПРОС №8.
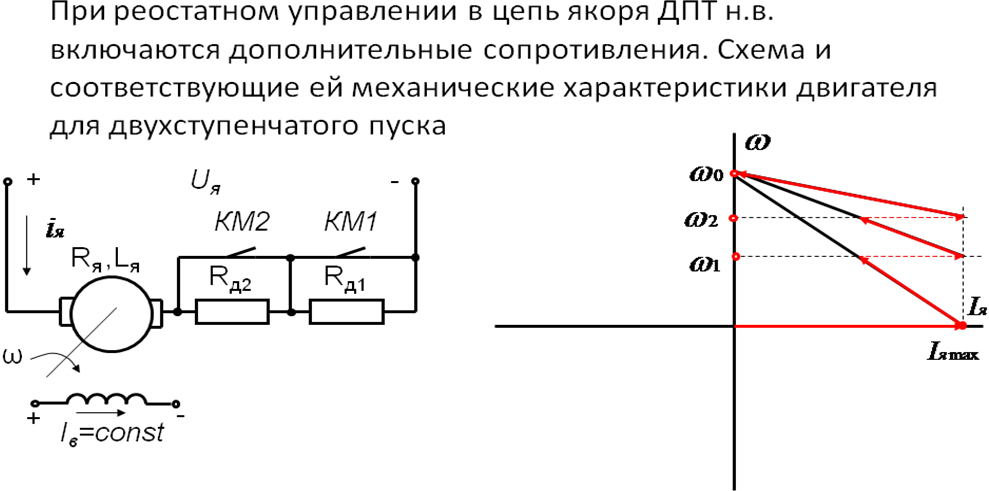
Расчет переходных процессов при реостатном управлении дпт н.В.
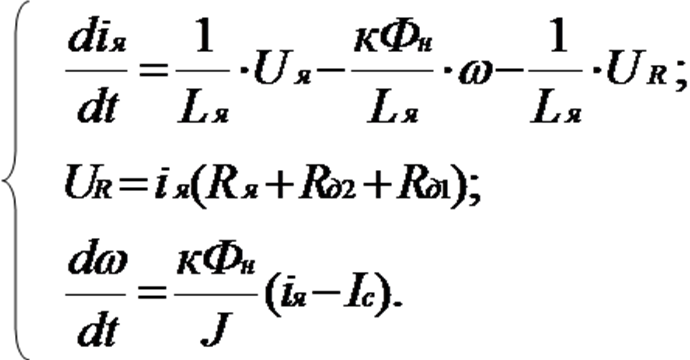
Система уравнений имеет вид
![]()
![]()
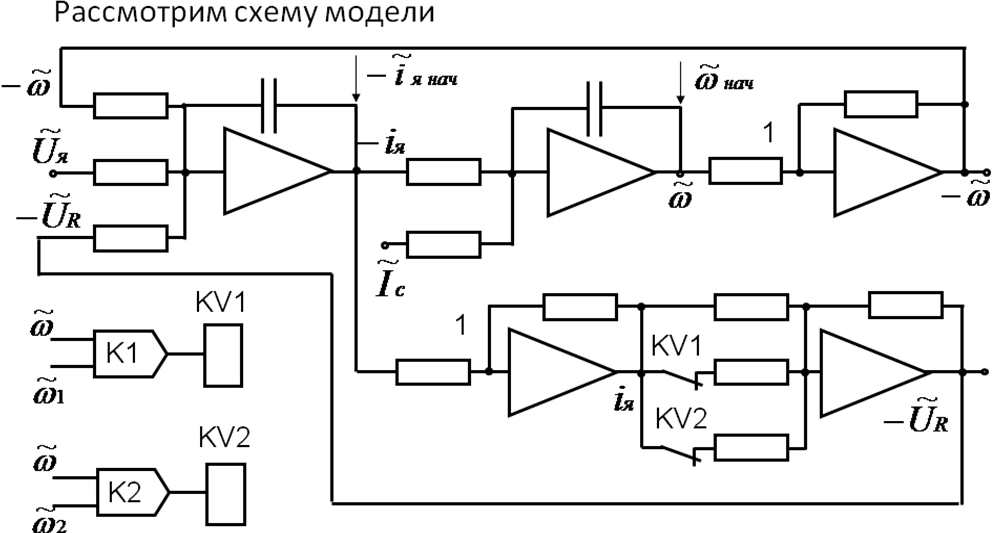
Для моделирования работы контакторов КМ1 и КМ2, с помощью которых производится автоматическое шунтирование добавочных сопротивлений в процессе пуска, в схему модели включены два компаратора К1 и К2, которые включают реле KV1 и KV2 при скоростях ω1 и ω2, значения которых задаются на вторые входы компараторов.
При размыкании контактов KV1 и KV2 из второго уравнения исключаются члены, содержащие Rд1 и Rд2, что эквивалентно
ш![]() унтированию
этих сопротивлений в реальной схеме.
унтированию
этих сопротивлений в реальной схеме.
Д![]() ля
этой схемы все масштабы, за исключением
, рассчитываются аналогично как
и для предыдущей схемы. При выборе
целесообразно принять
ля
этой схемы все масштабы, за исключением
, рассчитываются аналогично как
и для предыдущей схемы. При выборе
целесообразно принять
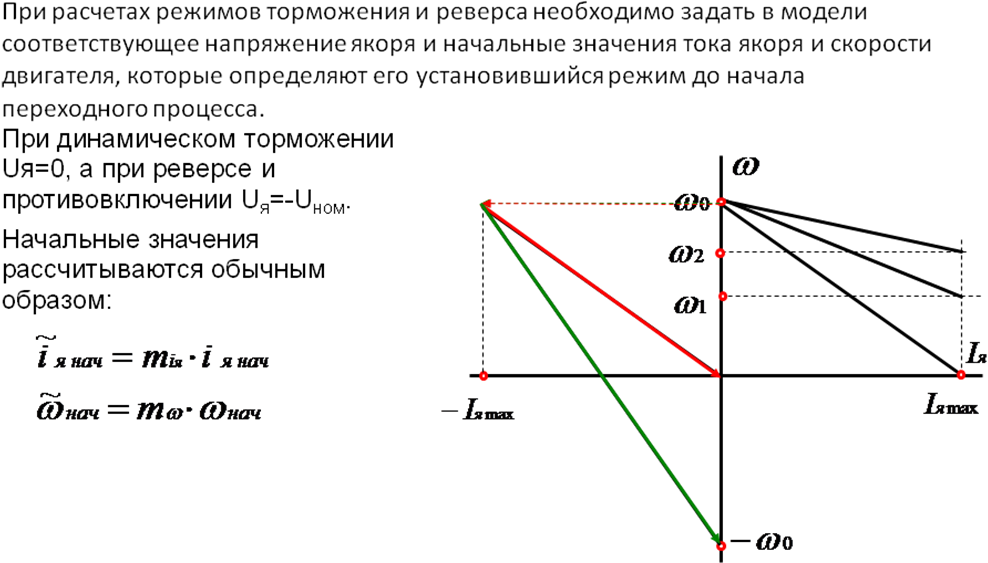
Р![]() ассмотренная
модель может быть использована для
расчета режимов торможения и реверса
двигателя. Единственным ограничением
при расчете таких режимов является
необходимость ограничения тока якоря
в пределах, принятых при выборе масштаба
ассмотренная
модель может быть использована для
расчета режимов торможения и реверса
двигателя. Единственным ограничением
при расчете таких режимов является
необходимость ограничения тока якоря
в пределах, принятых при выборе масштаба
Э![]() ти
условия обеспечиваются, если в цепь
якоря включены добавочные сопротивления:
ти
условия обеспечиваются, если в цепь
якоря включены добавочные сопротивления:
п![]() ри
динамическом торможении
при реверсе и торможении
ри
динамическом торможении
при реверсе и торможении
противовключением
ВОПРОС №9.