

6 Билет
1. Вектор. Понятия
Ответ: в геометрическом смысле вектор — это направленный отрезок, обычно определяемый точками своего начала и конца. Так или иначе вектором - называется отрезок, имеющий определенную длину и направление
Основные понятия
1) Модулем вектора |a| в геометрии называется его длина
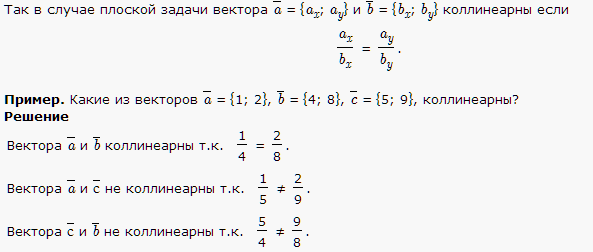
2) Коллинеарными называются такие вектора, векторное произведение которых равно нулю. Это параллельные вектора. Коллинеарные вектора могут быть сонаправленными или встречными, то есть направленными строго в противоположные стороны.
3) Ортогональными (перпендикулярными) называются такие вектора, скалярное произведение которых равно нулю. Для любого вектора все вектора, лежащие в любой перпендикулярной ему плоскости, будут ортогональны.
4) Нулевым является вектор, имеющий нулевую длину, то есть тот, у которого координаты начала и конца строго совпадают. В связи с этим обычно нельзя говорить о направлении такого вектора, поэтому его считают не имеющим направления.
5) Компланарными называются вектора, которые приведены к одному началу и лежат в одной плоскости. Если хотя бы один из 3 векторов – нулевой, то три вектора тоже компланарны.
6) Углом между двумя векторами, отложенными от одной точки, называется кратчайший угол, на который нужно повернуть один из векторов вокруг своего начала до положения сонаправленности с другим вектором.
7) Косинус угла между векторами равен скалярному произведению векторов, поделенному на произведение модулей векторов.
2. Сумма векторов и произведение вектора на число.
Ответ: начнем с простого, чтобы сложить два вектора, достаточно сложить каждую из его координат. Т.е. если есть два вектора с координатами: a (x y z) u b (x1 y1 z1) то их суммой будет:
(x+x1;y+y1;z+z1). С этим ясно, умножение вектора на число тоже довольно просто. Если есть вектор a(x y z) и число b=4, то просто домножаем КАЖДУЮ координату на это число.
3. Условие коллинеарности векторов:
Ответ:
1) Два вектора коллинеарны, если их отношения равны
2) Два вектора коллинеарны, если их векторное пр-е равно нулю.
Пример внизу.
4. Свойства линейных операций над векторами
Сложение
векторов коммутативно: ![]() .
.
Сложение
векторов ассоциативно: ![]() .
.
Прибавление
нулевого вектора к любому не меняет
последнего: ![]() .
.
Для
любого вектора ![]() существует
вектор
существует
вектор ![]() такой,
что
такой,
что ![]() или
или ![]() .
.
Умножение
вектора на число ассоциативно: ![]() .
Умножение вектора на число дистрибутивно
относительно сложения чисел:
.
Умножение вектора на число дистрибутивно
относительно сложения чисел: ![]() .
.
Дистрибутивность умножения векторов относительно сложения
Умножение
вектора на число дистрибутивно
относительно сложения векторов: ![]() .
.
Очевидно,
умножение на единицу не меняет вектор: ![]() .
.
Билет 7
1. Базис и система координат на плоскости и в пр-ве
Ответ:
Базисом
плоскости называется
пара линейно независимых (неколлинеарных)
векторов ![]() , взятых
в определённом порядке,
при этом любой вектор
плоскости является линейной комбинацией
базисных векторов.
, взятых
в определённом порядке,
при этом любой вектор
плоскости является линейной комбинацией
базисных векторов.
Любой вектор
плоскости ![]() единственным
образом раскладывается
по базису
:
единственным
образом раскладывается
по базису
:
![]() ,
где
,
где ![]() –
действительные числа.
Числа
называют координатами
вектора в данном
базисе.
–
действительные числа.
Числа
называют координатами
вектора в данном
базисе.
Также
говорят, что вектор
представлен
в виде линейной
комбинации базисных
векторов. То есть,
выражение ![]() называют разложением
вектора
по
азису
или линейной
комбинацией базисных
векторов.
называют разложением
вектора
по
азису
или линейной
комбинацией базисных
векторов.
Иными словами, говоря о разложении по базису мы подразумеваем какие-то коэффициенты, которые соответствуют векторам.
1.1 Система координат на плоскости
Ответ:
Когда говорят о прямоугольной
системе координат,
то чаще всего имеют в виду начало
координат, координатные оси и размерность
по осям. Прямоугольную систему координат
вполне можно определить через
ортонормированный базис ![]() .
И это почти так. Формулировка звучит
следующим образом:
.
И это почти так. Формулировка звучит
следующим образом:
Точка ![]() плоскости,
которая называется началом
координат,
и ортонормированный базис
задают декартову
прямоугольную систему координат
плоскости. То
есть, прямоугольная система
координат однозначно определяется
единственной точкой и двумя единичными
ортогональными векторами
плоскости,
которая называется началом
координат,
и ортонормированный базис
задают декартову
прямоугольную систему координат
плоскости. То
есть, прямоугольная система
координат однозначно определяется
единственной точкой и двумя единичными
ортогональными векторами ![]() .
.
Думаю, всем понятно, что с помощью точки (начала координат) и ортонормированного базиса ЛЮБОЙ ТОЧКЕ плоскости и ЛЮБОМУ ВЕКТОРУ плоскости можно присвоить координаты. Образно говоря, «на плоскости всё можно пронумеровать».
Обязаны
ли координатные векторы быть единичными?
Нет, они могут иметь произвольную
ненулевую длину. Рассмотрим точку
и
два ортогональных вектора ![]() произвольной
ненулевой длины. Собственно пример
данной системы, всем известной:
произвольной
ненулевой длины. Собственно пример
данной системы, всем известной:
1.2. Система координат в пр-ве
Ответ:
Базисом
трёхмерного пространства называется
тройка линейно независимых (некомпланарных)
векторов ![]() , взятых
в определённом порядке,
при этом любой вектор пространства единственным
образом раскладывается
по данному базису
, взятых
в определённом порядке,
при этом любой вектор пространства единственным
образом раскладывается
по данному базису ![]() ,
где
,
где ![]() –
координаты вектора
в
данном базисе
–
координаты вектора
в
данном базисе
Напоминаю, также можно сказать, что вектор представлен в виде линейной комбинации базисных векторов.
Понятие системы координат вводится точно так же, как и для плоского случая, достаточно одной точки и любых трёх линейно независимых векторов:
Точка
пространства,
которая называется началом
координат,
и некомпланарны
евекторы ![]() , взятые
в определённом порядке, задают аффинную
систему координат трёхмерного
пространства:
, взятые
в определённом порядке, задают аффинную
систему координат трёхмерного
пространства:

Точка
пространства,
которая называется началом
координат,
и ортонормированныйбазис ![]() задают декартову
прямоугольную систему координат
пространства.:
задают декартову
прямоугольную систему координат
пространства.:
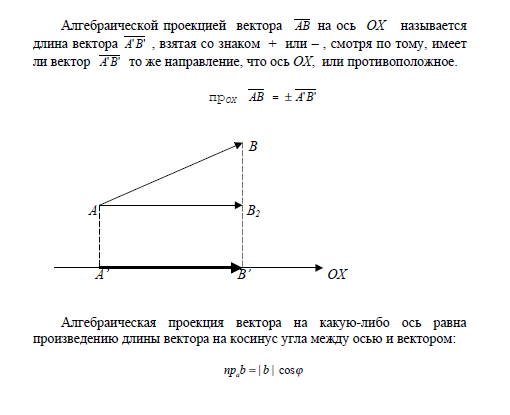
2. Геометрические и алгебраические проекции вектора на ось
3. Координаты вектора на плоскости и в пространстве
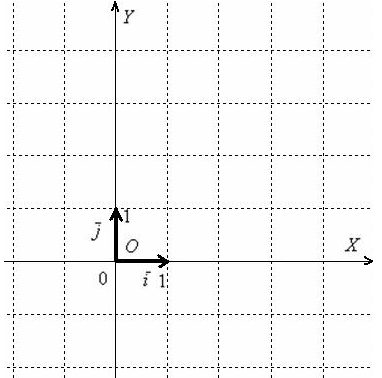
Начну с векторов на плоскости. Изображаем декартову с.к. и откладываем единичные вектора.

Векторы ![]() и
и ![]() ортогональны.
Ортогональны = Перпендикулярны.
ортогональны.
Ортогональны = Перпендикулярны.
Обозначение: ортогональность
векторов записывают привычным значком
перпендикулярности, например: ![]() .
.
Рассматриваемые векторы называют координатными векторами или ортами. Данные векторы образуют базис на плоскости. Иногда построенный базис называют ортонормированным базисом плоскости: «орто» – потому что координатные векторы ортогональны, прилагательное «нормированный» означает единичный, т.е. длины векторов базиса равны единице.
Обозначение: базис обычно записывают в круглых скобках, внутри которых в строгой последовательности перечисляются базисные векторы, например: . Координатные векторы нельзя переставлять местами.
Ответ:
Любой вектор ![]() плоскости единственным
образом выражается
в виде:
плоскости единственным
образом выражается
в виде:
![]() ,
где
,
где ![]() – числа,
которые называются координатами
вектора в
данном базисе. А само
выражение
называется разложением
вектора
по
базису
.
– числа,
которые называются координатами
вектора в
данном базисе. А само
выражение
называется разложением
вектора
по
базису
.
Координаты на плоскости.
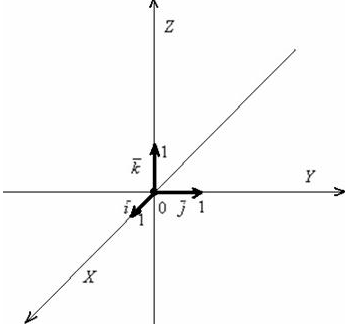
Теперь рассмотрим векторы в трехмерном пространстве, здесь практически всё так же, только добавится ещё одна координата.
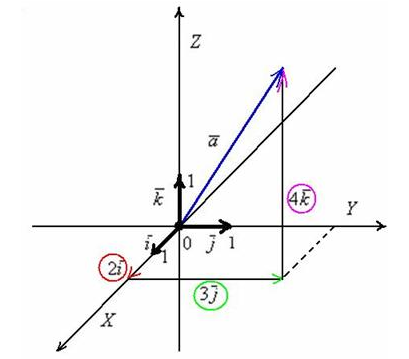
Это
есть ортонормированный базис ![]() трехмерного
пространства и прямоугольная система
координат, единичные векторы
трехмерного
пространства и прямоугольная система
координат, единичные векторы ![]() данного
базиса попарно ортогональны:
данного
базиса попарно ортогональны: ![]() и
и ![]() .
Ось
.
Ось ![]() наклонена
под углом 45 градусов только для того,
чтобы складывалось визуальное впечатление
пространства. И в данном случае координаты
отдельных векторов будут записывать в
соответствии с i j k, и вместо отсутствующих
координат будут ставить нули. Например
3j
– коорд. Y
=> вектор b
(0 3 0).
наклонена
под углом 45 градусов только для того,
чтобы складывалось визуальное впечатление
пространства. И в данном случае координаты
отдельных векторов будут записывать в
соответствии с i j k, и вместо отсутствующих
координат будут ставить нули. Например
3j
– коорд. Y
=> вектор b
(0 3 0).
Билет 8
1. Направляющие косинусы вектора
Ответ:
это
косинусы углов, которые вектор образует
с положительными полуосями координат.
Направляющие косинусы однозначно задают
направление вектора. Если вектор имеет
длину 1, то его направляющие косинусы
равны его координатам. Следовательно
вывод: направление
вектора в пространстве определяется
углами ,
которые
вектор образует с осями
Косинусы этих углов называются направляющими
косинусами вектора: ![]() ,
, ![]() ,
, ![]() .
.

С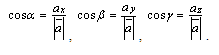
![]() вязь
между ними: Это
обязательное условие!
вязь
между ними: Это
обязательное условие!
А находят их так:
Далее, это орт, он же единичный вектор который находится ТОЧНО так же, как и направляющие косинусы, разве что вместо cos пишем v с галочкой наверху.
2. Сумму векторов и произведение вектора на число находили выше, хуй знает почему в этом билете тот же вопрос.
Билет 9
Ответ: 1. Нахождение координат вектора, зная начало и конец + координаты середины:
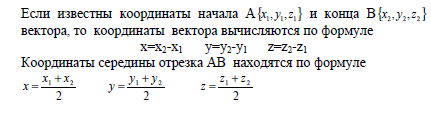
2. Расстояние между двумя точками:
![]()
![]()
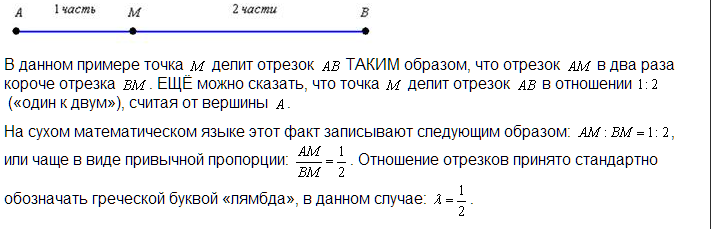
3. Деление в заданном отношении
Очень простой вопрос, но тем не менее:
Билет 10

Билет 11
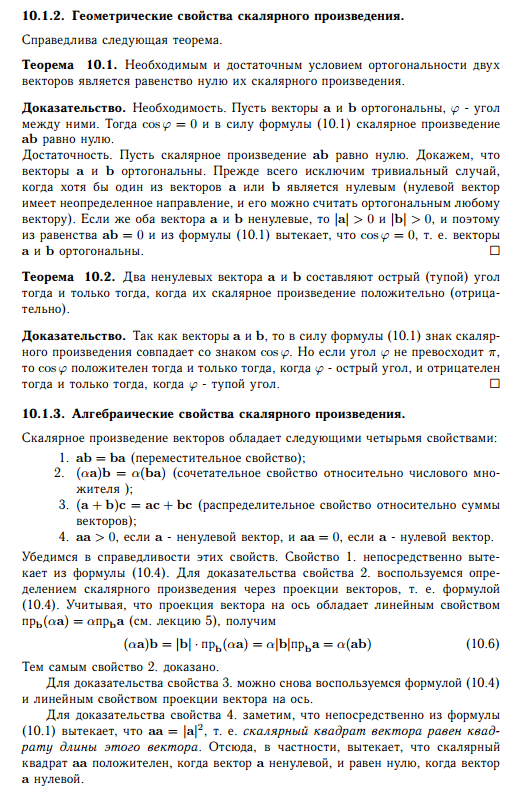
Три некомпланарных вектора a, b и с, взятые в указанном порядке, образуют правую тройку, если с конца третьего вектора с кратчайший поворот от первого вектора а ко второму вектору b виден совершающимся против часовой стрелки, и левую, если по часовой (см. рис. 16).
Векторным произведением вектора а на вектор b называется вектор с, который:
1. Перпендикулярен векторам a и b, т. е. с^а и с^b;
2. Имеет
длину, численно равную площади
параллелограмма, построенного на
векторах а иb как
на сторонах (см. рис. 17), т. е.
![]()
3.Векторы a, b и с образуют правую тройку.

Геометрический смысл векторного произведения: модуль векторного произведения векторов численно равен площади параллелограмма, построенного на этих векторах как на сторонах.
Векторное произведение обозначается а х b или [а,b].
Вектора, параллельные одной прямой или лежащие на одной прямой называют коллинеарными.
Условия коллинеарности векторов
Два вектора коллинеарные, если отношения их координат равны.
Два вектора коллинеарные, если их векторное произведение равно нулю.
Алгебраические свойства векторного произведения
Для
любых векторов ![]() ,
, ![]() ,
, ![]() и
любого действительного числа
и
любого действительного числа ![]() :
:
1. ![]() ;
;
2. ![]() ;
;
3. ![]() .
.
Первое свойство определяет антисимметричность векторного произведения, второе и третье — аддитивность и однородность по первому множителю. Эти свойства аналогичны свойствам произведения чисел: первое свойство "противоположно" закону коммутативности умножения чисел (закон антикоммутативности), второе свойство соответствует закону дистрибутивности умножения чисел по отношению к сложению, третье — закону ассоциативности умножения. Поэтому рассматриваемая операция и называется произведением векторов. Поскольку ее результатом является вектор, то такое произведение векторов называется векторным.
Докажем
первое свойство, предполагая, что
векторы
и
не
коллинеарны (в противном случае обе
части доказываемого равенства равны
нулевому вектору). По определению
векторы ![]() и
и ![]() имеют
равные длины
имеют
равные длины ![]() и
коллинеарны (так как оба вектора
перпендикулярны одной плоскости). По
определению тройки векторов
и
коллинеарны (так как оба вектора
перпендикулярны одной плоскости). По
определению тройки векторов ![]() и
и ![]() —
правые, т.е. вектор
направлен
так, что кратчайший поворот
от
к
происходит
в положительном направлении (против
часовой стрелки), если смотреть из конца
вектора
,
а вектор
—
правые, т.е. вектор
направлен
так, что кратчайший поворот
от
к
происходит
в положительном направлении (против
часовой стрелки), если смотреть из конца
вектора
,
а вектор ![]() направлен
так, что кратчайший поворот
от
к
происходит
в положительном направлении, если
смотреть из конца вектора
(рис.
1.43). Это означает, что векторы
и
противоположно
направлены. Следовательно,
направлен
так, что кратчайший поворот
от
к
происходит
в положительном направлении, если
смотреть из конца вектора
(рис.
1.43). Это означает, что векторы
и
противоположно
направлены. Следовательно, ![]() ,
что и требовалось доказать. Доказательство
остальных свойств приведено ниже (см.
пункт 1 замечаний 1.13).
,
что и требовалось доказать. Доказательство
остальных свойств приведено ниже (см.
пункт 1 замечаний 1.13).
Координаты вектора с находим с помощью определителя матрицы:
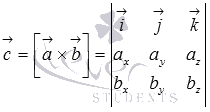
Рассчитываем определитель, приводим подобные, коэффициенты при I,J,k и будут координатами x, y, z соответственно .
Билет 12


Билет 13
Множество L называется линейным или векторным пространством, если для всех элементов (векторов) этого множества определены операции сложения и умножения на число и справедливо:
1. Каждой паре элементов x и y из L отвечает элемент x + y из L, называемый суммой x и y, причём:
x + y = y + x − сложение коммутативно;
x + (y + z) = (x + y) + z − сложение ассоциативно;
x + 0 = x − существует единственный нулевой элемент 0 ( x + 0 = x для любого x из L);
x + (− x) = 0 − для каждого элемента x из L существует единственный противоположный элемент −x ( x + (−x) = 0 для любого x из L).
2. Каждой паре x и α, где α − число, а x элемент из L, отвечает элемент α·x, наываемый произведением α и x, причём:
α·(β·x) = (α·β)·x − умножнение на число ассоциативно: ;
1·x = x − для любого элемента x из L.
3. Операции сложения и умножения на число связаны соотношениями:
α·(x + y) = α·x + α·y − умножнение на число дистрибутивно относительно сложения элементов;
(α + β)·x = α·x + β·x − умножнение на вектор дистрибутивно относительно сложения чисел.
Набор
векторов ![]() называется системой
векторов.
называется системой
векторов.
Система
из ![]() векторов
называется линейно
зависимой,
если существуют такие числа
векторов
называется линейно
зависимой,
если существуют такие числа ![]() ,
не все равные нулю одновременно, что
,
не все равные нулю одновременно, что
![]()
(1.1) |
Система
из
векторов
называется линейно
независимой, если
равенство (1.1) возможно только при ![]() ,
т.е. когда линейная комбинация в левой
части равенства (1.1) тривиальная.
,
т.е. когда линейная комбинация в левой
части равенства (1.1) тривиальная.
Замечания 1.2
1.
Один вектор ![]() тоже
образует систему: при
тоже
образует систему: при ![]() —
линейно зависимую, а при
—
линейно зависимую, а при ![]() —
линейно независимую.
—
линейно независимую.
2. Любая часть системы векторов называется подсистемой.

Свойства линейно зависимых и линейно независимых векторов
1. Если в систему векторов входит нулевой вектор, то она линейно зависима
.
2. Если в системе векторов имеется два равных вектора, то она линейно зависима.
3. Если
в системе векторов имеется два
пропорциональных вектора ![]() ,
то она линейно зависима.
,
то она линейно зависима.
4. Система
из ![]() векторов
линейно зависима тогда и только тогда,
когда хотя бы один из векторов есть
линейная комбинация остальных.
векторов
линейно зависима тогда и только тогда,
когда хотя бы один из векторов есть
линейная комбинация остальных.
5. Любые векторы, входящие в линейно независимую систему, образуют линейно независимую подсистему.
6. Система векторов, содержащая линейно зависимую подсистему, линейно зависима.
7. Если система векторов линейно независима, а после присоединения к ней вектора оказывается линейно зависимой, то вектор можно разложить по векторам , и притом единственным образом, т.е. коэффициенты разложения находятся однозначно.
Докажем,
например, последнее свойство. Так как
система векторов ![]() —
линейно зависима, то существуют числа
—
линейно зависима, то существуют числа ![]() ,
не все равные 0, что . В этом равенстве
,
не все равные 0, что . В этом равенстве ![]() .
В самом деле, если
.
В самом деле, если ![]() ,
то
,
то ![]() .
Значит, нетривиальная линейная комбинация
векторов
равна
нулевому вектору, что противоречит
линейной независимости системы
.
Следовательно,
и
тогда
.
Значит, нетривиальная линейная комбинация
векторов
равна
нулевому вектору, что противоречит
линейной независимости системы
.
Следовательно,
и
тогда ![]() ,
т.е. вектор
есть
линейная комбинация векторов
.
Осталось показать единственность такого
представления. Предположим противное.
Пусть имеется два разложения
,
т.е. вектор
есть
линейная комбинация векторов
.
Осталось показать единственность такого
представления. Предположим противное.
Пусть имеется два разложения ![]() и
и ![]() ,
причем не все коэффициенты разложений
соответственно равны между собой
(например,
,
причем не все коэффициенты разложений
соответственно равны между собой
(например, ![]() ).
).
Тогда
из равенства ![]() получаем
получаем ![]() .
.
Следовательно,
линейная комбинация векторов
равна
нулевому вектору. Так как не все ее
коэффициенты равны нулю (по крайней
мере ![]() ),
то эта комбинация нетривиальная, что
противоречит условию линейной
независимости векторов
.
Полученное противоречие подтверждает
единственность разложения.
),
то эта комбинация нетривиальная, что
противоречит условию линейной
независимости векторов
.
Полученное противоречие подтверждает
единственность разложения.
Векторное
пространство ![]() называется n-мерным,
если в нем можно найти n линейно
независимых векторов, но больше,
чем n линейно
независимых векторов оно не содержит.
называется n-мерным,
если в нем можно найти n линейно
независимых векторов, но больше,
чем n линейно
независимых векторов оно не содержит.
Размерность пространства – это максимальное число содержащихся в нем линейно независимых векторов.
Пространство, имеющее конечную размерность, называется конечномерным. Пространство, в котором можно найти сколь угодно много линейно независимых векторов, называется бесконечномерным.
Совокупность n линейно независимых векторов n- мерного векторного пространства называется его базисом.
Если каждой паре векторов x, y линейного пространства L поставлено в соответствие действительное число (x, y), так, что для любых x, y и z из L и любого действительного числа α справедливы следующие аксиомы:
(x, y) = (y, x),
(α·x, y) = α·(x, y),
(x + y, z) =(x, z) + (y, z),
(x, x)> 0 при x ≠ 0, (0, 0) = 0,
то в пространстве L определено скалярное произведение (x, y).
Если в линейном пространстве определено скалярное произведение, то такое пространство называется евклидовым пространством.
Теорема 1 (неравенство Коши-Буняковского) |
Для
любых чисел
|
Доказательство |
При
Докажем, что
Перепишем это неравенство, частично раскрыв скобки:
Легко заметить, что для того, чтобы доказать это неравенство, достаточно доказать
Перенеся все слагаемые в одну сторону, и сгруппировав их, получаем очевидное неравенство:
А это и доказывает неравенство Коши-Буняковского. |
Определение 2 |
1. Число 2. Если |
Теорема 3 (неравенство Коши) |
Пусть , тогда
|
Доказательство |
Шаг
первый: сначала
индукцией докажем это неравенство
для натуральных чисел вида
Докажем неравенство (1) для m=k+1, то есть докажем, что
В самом деле, Итак, мы доказали неравенство Коши, когда количество чисел в средних есть степень двойки. А как быть с остальными? Для них мы докажем неравенство Коши, используя еще одну модификацию индукции – "индукцию вниз". Допустим, что неравенство Коши верно для n=k, то есть допустим, что
и
докажем это неравенство для n=k-1.
Для этого в неравенстве Коши положим
После элементарных алгебраических преобразований получили:
Сократим неравенство на второй множитель правой части:
И,
наконец, возведем обе части неравенства
в степень
Неравенство Коши доказано полностью. |

Билет 14
Прямая на плоскости
Ответ :Общее уравнение
Ax
+ By + C (![]() >
0).
>
0).
Вектор ![]() =
(А; В) -
нормальный вектор прямой.
=
(А; В) -
нормальный вектор прямой.
В
векторном виде: ![]() +
С = 0,
где
+
С = 0,
где ![]() -
радиус-вектор произвольной точки на
прямой (рис. 4.11).
-
радиус-вектор произвольной точки на
прямой (рис. 4.11).
Частные случаи:
1) By + C = 0 - прямая параллельна оси Ox;
2) Ax + C = 0 - прямая параллельна оси Oy;
3) Ax + By = 0 - прямая проходит через начало координат;
4) y = 0 - ось Ox;
5) x = 0 - ось Oy.
Каждый не равный нулю вектор, лежащий на данной прямой или параллельный ей, называется направляющим вектором этой прямой.
Направляющий
вектор произвольной прямой в дальнейшем
обозначается буквой ![]() ,
его координаты - буквами l,
m, n:
,
его координаты - буквами l,
m, n:
![]() .
.
Если
известна одна точка ![]() прямой
и направляющий вектор
,
то прямая может быть определена (двумя)
уравнениями вида
прямой
и направляющий вектор
,
то прямая может быть определена (двумя)
уравнениями вида
![]()
Каноническое уравнение прямой
![]()
ПАРАМЕТРИЧЕСКИЕ УРАВНЕНИЯ ПРЯМОЙ
П оложение
прямой в пространстве вполне определяется
заданием какой-либо её фиксированной
точки М1 и
вектора
оложение
прямой в пространстве вполне определяется
заданием какой-либо её фиксированной
точки М1 и
вектора ![]() ,
параллельного этой прямой.
,
параллельного этой прямой.
Вектор , параллельный прямой, называется направляющим вектором этой прямой.
Итак,
пусть прямая l проходит
через точку М1(x1, y1, z1),
лежащую на прямой параллельно вектору ![]() .
.
Рассмотрим
произвольную точку М(x,y,z) на
прямой. Из рисунка видно, что ![]() .
.
Векторы ![]() и
и ![]() коллинеарны,
поэтому найдётся такое число t,
что
коллинеарны,
поэтому найдётся такое число t,
что ![]() ,
где множитель t может
принимать любое числовое значение в
зависимости от положения точки M на
прямой. Множитель t называется
параметром. Обозначив радиус-векторы
точек М1 и М соответственно
через
,
где множитель t может
принимать любое числовое значение в
зависимости от положения точки M на
прямой. Множитель t называется
параметром. Обозначив радиус-векторы
точек М1 и М соответственно
через ![]() и
и ![]() ,
получаем
,
получаем ![]() .
Это уравнение называется векторным уравнением
прямой. Оно показывает, что каждому
значению параметра t соответствует
радиус-вектор некоторой точки М,
лежащей на прямой.
.
Это уравнение называется векторным уравнением
прямой. Оно показывает, что каждому
значению параметра t соответствует
радиус-вектор некоторой точки М,
лежащей на прямой.
Запишем
это уравнение в координатной форме.
Заметим, что ![]() ,
, ![]() и
и ![]() отсюда
отсюда 
Полученные уравнения называются параметрическими уравнениями прямой.
При изменении параметра t изменяются координаты x, y и z и точка М перемещается по прямой.