17. Исполнительные элементы систем эа (электромагнитные, электродвигательные им, электромагнитные муфты трения, скольжения и др.)
Электромагнитные муфты
Это звенья между приводом и РО. Регулирующее воздействие осуществляется за счет изменения сцепления.
Муфты водного трения – это ферропорошковые или магнитоимпульсные, работающие на основе намагниченного порошка, образуя слой сцепления.
+не боятся перегрузок, являются быстродействующими ИМ, Т=0,005-0,008с.
По конструктивным исполнениям могут различаться расположением, числом катушек, формой рабочей поверхности и по виду токопровода.
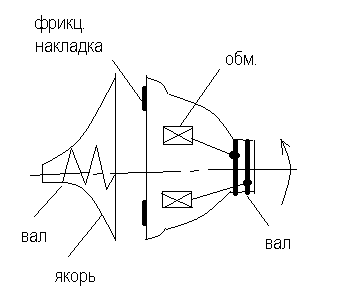
Муфты сухого трения.
Работают за счет сил трения. Работаю от 11 до 50 Вт.
Индуктивные.
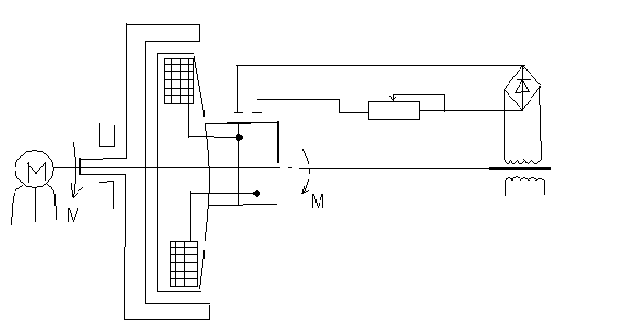
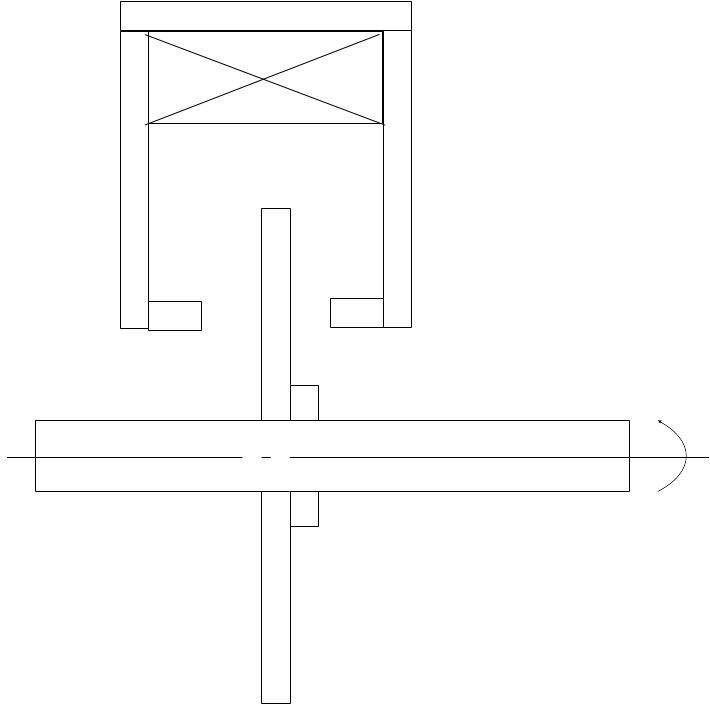
Э/м муфты скольжения.
Напоминают ЭД с кз-ротором, где на ведущей части расположены обмотки возбуждения постоянного ротора, а на ведомой - кз-обмотки или сплошной массивный ротор.
+ скорость и момент выходного вала можно легко и в широких пределах регулировать, изменять ток возбуждения, что невозможно в др. видах муфт, плавное регулирование.
18. Управляющие и преобразовательные элементы систем эа (основные виды и функции). Магнитные усилители, его основные характеристики, принцип функционирования.
Для управляющих ИМ.
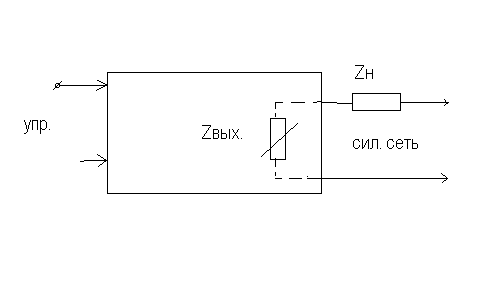
Контактные (контакторы, магнитные, шаговые искатели, реле времени, магнитные пускатели, силовые контролеры, кнопки управления, различные переключатели.) Бесконтактные. Функция: элемент с поли электрическим сопротивлением.
Величина должна изменяться в широких пределах.
(магнитные усилители, тиристоры, транзисторы)
Цепь замыкается,
если ![]() ;
;
Размыкается, если
![]() .
.
+ не образуется дуга, обеспечивается быстродействие.
- не обеспечивает гальванической развязки цепей управления,
высокое падение напряжения на открытом бесконтактном участке, что обуславливает большие потери энергии,
чувствительны к перегрузкам,
трудно создать многоцепные устройства.
Поэтому выбор устройства определяется большими токами и напряжением при низкой частоте коммутации (f<1Гц.)
Магнитный усилитель.
Представляет собой статическое устройство, состоящее из магнитного сердечника и обмоток (кольцевой магнитопровод).
+ Большой коэффициент усиления, высокая чувствительность.
Возможность простого суммирования сигнала.
Высокая перегрузочная способность.
Высокая надежность.
- большая постоянная времени,
инерционность.
Магнитным усилителем называется потому, что их работа основана на зависимости магнитной проницаемости сердечника µ или ферромагнитных материалов на переменном токе от постоянного подмагничивающего тока.
19. Управляющие и преобразовательные элементы систем эа. Магнитные усилители, управляющие му (основная характеристика и схема управления).
Основные виды:
1) контактные: контакторы, магнитные пускатели, реле, кнопки.
2) бесконтактные: магнитные усилители.
Функцию коммутирующего элемента выполняет элемент с нелинейным электрическим сопротивлением, величина которого изменяется в широких диапазонах.
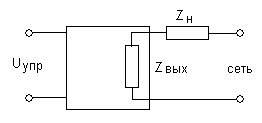
Сеть замкнута,
если
![]() ;
;
разомкнута, если
![]() ;
;
+ : не образуется дуга при коммутации;
- : не обеспечивает гальванической развязки цепей управления;
чувствительность к перегрузкам;
большее (увеличенное) падение напряжения на бесконтактном уст-ве.
МУ- статическое устройство, состоящее из сердечника и обмоток( кольцевой магнитопровод)
+ высокая чувствительность, коэффициент усиления, большая перегрузочная способность, высокая надежность.
- большая постоянная времени, высокая инерционность основана на использовании зависимости магнитной проницаемости ферромагнитных материалов на переменном токе от постоянного намагничивающего тока.
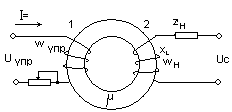
Входной сигнал - постоянный ток, поступающий на обмотки управления.
Обмотка управления. Силовая обмотка МУ, получающая питание от источника переменного тока через сопротивление Zн.
Обратная связь и смещение. Обратная связь вводиться путем включения соответствующих обмоток. Они намагничиваются так же, как обмотки управления.
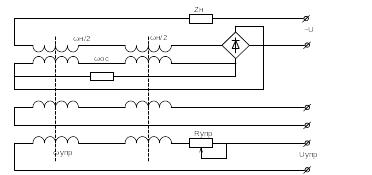
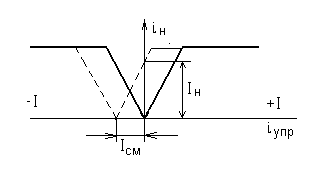
На внутренних стержнях располагаются дополнительные обмотки пост. тока - обмотки смещения с Uсм от стабилизированного ист. пост. напряжения. (Чтобы ток в нагрузке или силовой обмотке в зависимости от полярности изменялся различным образом)
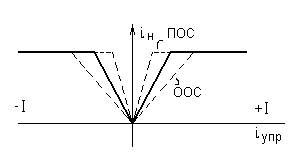
Следовательно такой способ получают, создав начальное подмагничивание пост. магн. потоком. Iн зависит от начального тока намагничивания. Обр.связь используется для того, чтобы увеличить коэф-т усиления. Обратные связи м.б. внешними, внутренними, положительными, отрицательными, по току и напряжению.
Для создания внешней ОС используют спец обмотку, которая пропускает Iн или Uн. Сопротивление служит для регулирования коэф-та обр.связи.
Действие Iос или Uос повышает действие Uупр, т.е. магн. поле обмотки ОС направлено согласно с магн. полем, создаваемым обмоткой управления.
Смешение М.У. только с одной обмоткой тока одинаково реагирует на оба направления тока подмагничивания.
На практике, однако, часто требуется, чтобы ток в нагреват. или в силовой обмотке в зависимости от полярности сигнала управления изменялся различным образом. Такой способ можно получить, создав начальное подмагничивание пост.магн. потоком. Поэтому на внутренних стержнях располагают доп. обмотки. пост тока (обмотки смещения) с питанием от стабилизированного источника пост. напряжения.