

Соленоидный преобразователь.
Вых. перемещения для рис.1 - от 0,01 до 5 мм; для рис.3 - от 3 до 100 мм. Входной величиной является изменение воздушного зазора, а выходной - ток преобразователя IП. Активным сопротивлением вторичного измерительного прибора можно пренебречь, поскольку оно намного меньше индуктивного.
Индуктивность катушки определяется по приближённой формуле:
L = (2π·w2·S·10-7)/δ. L=f (δ).
w - число витков;
S - поперечное сечение магнитопровода;
δ-зазор.
![]() .
.
Чувствительность: [А/м]
![]()
ω - частота.
Величина индуктивности катушки зависит от величины воздушного зазора:
RT= l·δ/μ0·S,
l - длина магнитных линий;
S - поперечное сечение;
μ0 - 1,26·10-6 Гн/м.
1. L=f (δ). 2. L=f (S). 3. L=f (μ0).
Для повышения чувствительности у этих датчиков применяются дифференциальные датчики (имеют лучшие метрологические характеристики, линейные характеристики, малую t˚).
Т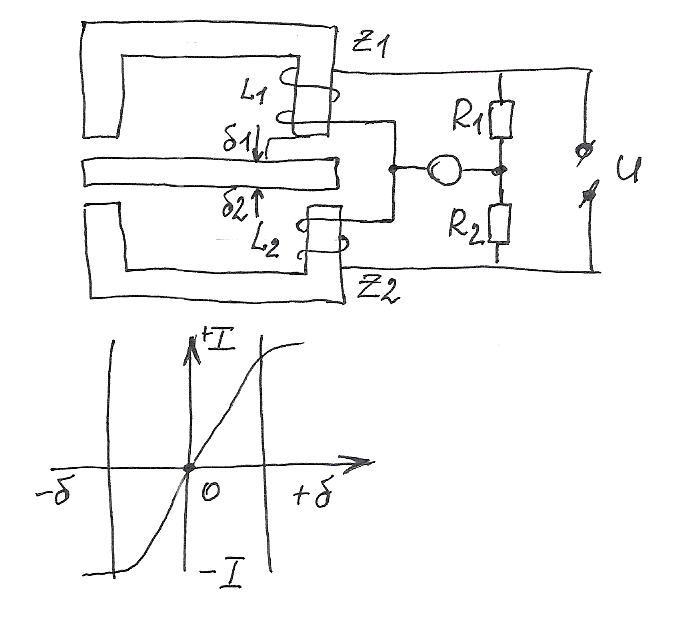 акая
схема является реверсивной при небольших
отклонениях входного сигнала.
акая
схема является реверсивной при небольших
отклонениях входного сигнала.
I=k·δ.
Выходной сигнал (I, U) изменяется практически линейно.
Индуктивность зависит от числа витков ω и магнитного сопротивления магнитному потоку L:
L=w2/Zм ; Zм=Rs+Rм+j·Xм ,
Rs - сопротивление магнитному потоку воздушного зазора;
Rм - сопротивление магнитному потоку металлической части магнитопровода;
Xм - величина потерь в стали на вихревые токи и гистерезис.
Активные магнитные сопротивления стальной части магнитопровода (без учёта поля выпучивания) определяются:
Rм=lСТ/(μ0·μ·S),
lСТ- длина силовых линий стали; μ - относит. магнитная проницаемость; μ0 -4π·10-7 Гн/м.
Магнитное сопротивление воздушного зазора:
Rs=2δ/(μ0·S).
8. Электромагнитные взаимоиндуктивные
(трансформаторные) датчики
(в том числе магнитоупругие взаимоиндуктивные)
систем электроавтоматики
(для измерения перемещений, усилий, моментов и деформаций).
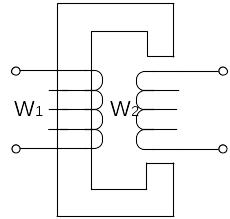
Принцип действия основан на изменении взаимной индуктивности w1, w2 при перемещении одной относительно другой или перемещении якоря датчика. Датчики с перемещением якоря (рис.1) и с поворотным якорем (рис.2) - обмотка закреплена на поворотной рамке. Датчики позволяют получать U на выходе любого вида, не зависимо от UВХ.
Е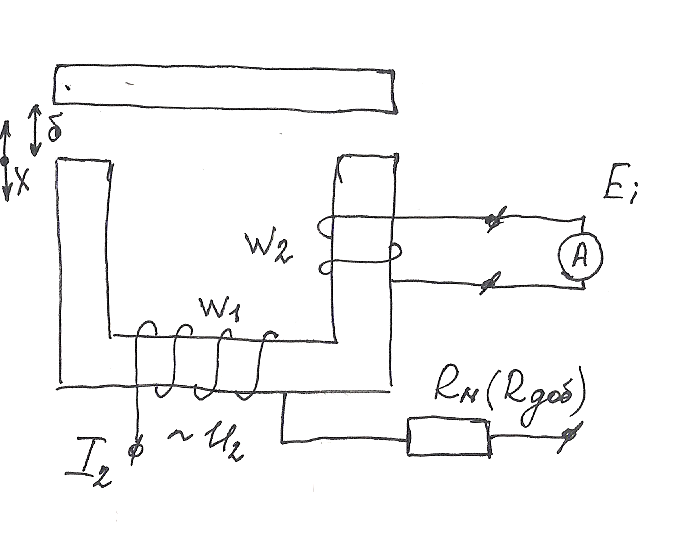 2=ω·w1·Ф,
Е2=f(δ),
I1=const.
2=ω·w1·Ф,
Е2=f(δ),
I1=const.
Во вторичной обмотке индуцируется ЭДС от величины δ относительно изменения магнитного потока Ф.
Поворотный трансформаторный датчик. Имеется поворотный якорь, на изменении показателя угловых перемещений.
α 0
(Е2=0), Е2(max)
- α=α1, α=α2.
0
(Е2=0), Е2(max)
- α=α1, α=α2.
Такие датчики могут определять направление углового перемещения.
Угол приводит к изменению магнитного потока. Uвых=к·α.
Т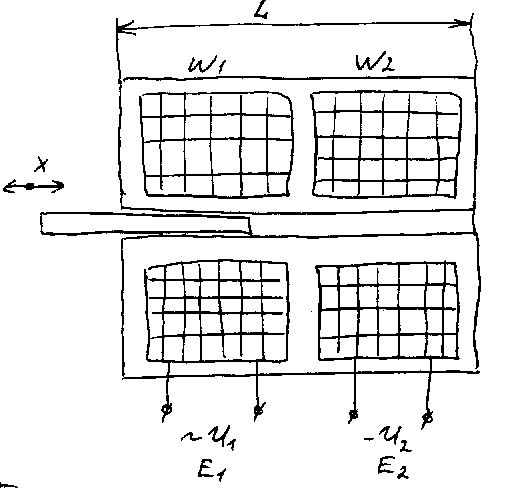 рансформаторный
датчик соленоидного типа.
рансформаторный
датчик соленоидного типа.
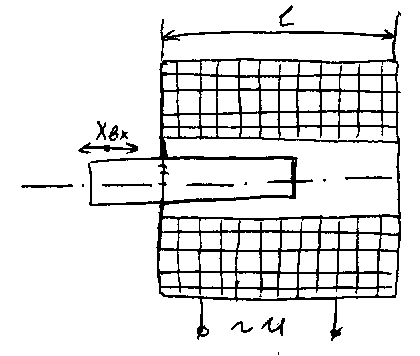
Трансформаторный датчик с разомкнутым магнитопроводом.
U2=k·(w2/w1)·Xвх·U1,
Хвх= (0,1-0,2)·L.
Чувствительность от 0,5 до 13 мВ/мк.
В дифференциальном датчике сущ. не 2 обмотки, а 4.
9. Генераторные индукционные датчики (перемещений) систем электроавтоматики.
Эти датчики используют принцип закона электромагнитной индукции наведения ЭДС от магнитного потока Ф.
Могут измерять не только линейные и угловые перемещения, но и скорость и ускорение.
Типы датчиков:
1. Работающие на основе изменения линейных или угловых перемещений.
2. Работающие на основе магнитного сопротивления или магнитной зазора.
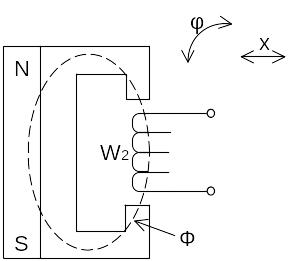
При x = 0, eвых=0;
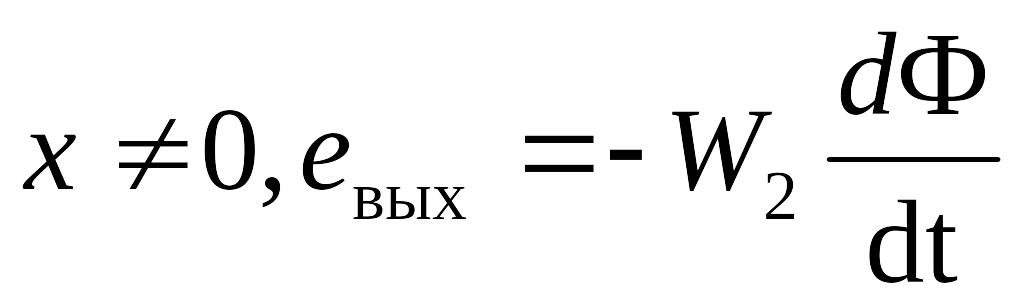
Чтобы изменить перемещение или ускорение, необходимо дифференцировать или интегрировать
e=k*B*l*W*V ,
где В – составляющая магнитной индукции перпендикулярная скорости;
k – постоянный коэффициент;
W – число витков катушки.
Для большинства индукционных датчиков статическая характеристика как функция поворота линейная Е=f(k,φ), погрешность составляет 0,5-1,5%.
К индукционным датчикам относятся зубчатый измерительный преобразователь. Так же к ним относятся тахогенераторы постоянного U и переменного I, которые представляют собой миниатюрные генераторы с независимым возбуждением от постоянных магнитов или обмоток возбуждения.
Для тахогенераторов постоянного тока Ф остается неизменным, выходное U снимается со щеток тахогенератора пропорционально скорости вращения на ХХ.
Достоинства тахогенераторов: большой диапазон измерения (10-300) – используется как преобразователь частоты вращения для автоматизации оборуд-я, механической обработки при изменении скорости подачи.
Недостатки: не позволяет получить высокую точность при подключении к нему вторичного преобразователя угла поворота, в случае, когда необходим электрический выходной сигнал.