

57.Понятие о силовом поле и потенциальной энергии
СИЛОВОЕ ПОЛЕ
- часть пространства (ограниченная или неограниченная),в каждой точке к-рой на помещённую туда материальную частицу действуетопределённая по численной величине и направлению сила, зависящая толькоот координат х, у, z этой точки. Такое С. п. наз. стационарным;если сила поля зависит и от времени, то С. п. наз. нестационарным; еслисила во всех точках С. п. имеет одно и то же значение, т. е. не зависитни от координат, ни от времени, С. п. наз. однородным.
Стационарное
С. п. может быть задано ур-ниями
![]()
где Fx, Fy, Fz - проекции силыполя F.
Если
существует такая ф-ция U(x,
у,z), называемая
силовой ф-цией, <что элементарная
работа сил поля равна полному дифференциалу
этой ф-ции, <то С. п. наз. потенциальным.
В этом случае С. п. задаётся одной ф-цией
U(x,у, z),
а сила F может быть определена через эту
ф-цию равенствами:
![]()
или
![]() .
Условиесуществования силовой ф-ции для
данного С. п. состоит в том, что
.
Условиесуществования силовой ф-ции для
данного С. п. состоит в том, что

или
![]() .
При перемещении в потенциальном С. п.
из точки M1(x1,y1,
z1
)в точку М 2
(х 2,у
2,z2)
работа сил поля определяется равенством
.
При перемещении в потенциальном С. п.
из точки M1(x1,y1,
z1
)в точку М 2
(х 2,у
2,z2)
работа сил поля определяется равенством
![]() и
не зависит от вида траектории, по к-рои
перемещается точка приложениясилы.
и
не зависит от вида траектории, по к-рои
перемещается точка приложениясилы.
Поверхности U(x, у,z) = const, на к-рых ф-ция сохраняет пост. <значение, наз. поверхностями уровня. Сила в каждой точке поля направленапо нормали к проходящей через эту точку поверхности уровня; при перемещениивдоль поверхности уровня работа сил поля равна нулю.
Примеры
потенциального С. п.: однородное поле
тяжести, для к-рого U=
-mgz, где т
- масса движущейся
в поле частицы, g
- ускорениесилы
тяжести (ось z
направлена вертикально вверх); ньютоново
полетяготения, для к-рого U
= km/r, где r =![]() -
расстояние от центра притяжения, k -
постоянный для данного поля коэффициент.
<Вместо силовой ф-ции в качестве
характеристики потенциального С. п.
можноввести потенциальную
энергию П,
связанную с U
зависимостью П(х,
<у, z)= = -U(x,
у,z). Изучение
движения частицы в потенциальномС. п.
(при отсутствии других сил) существенно
упрощается, т. к. в этомслучае имеет
место закон сохранения механич. энергии,
позволяющий установитьпрямую зависимость
между скоростью частицы и её положением
в С. п. с. <м.
Тарг. СИЛОВЫЕ
ЛИНИИ - семейство
кривых, характеризующих
пространственноераспределение векторного
поля сил; направление вектора поля в
каждой точкесовпадает с касательной к
С. л. Т. о., ур-ния С. л. произвольного
векторногополя А
(х, у,z) записываются
в виде:
-
расстояние от центра притяжения, k -
постоянный для данного поля коэффициент.
<Вместо силовой ф-ции в качестве
характеристики потенциального С. п.
можноввести потенциальную
энергию П,
связанную с U
зависимостью П(х,
<у, z)= = -U(x,
у,z). Изучение
движения частицы в потенциальномС. п.
(при отсутствии других сил) существенно
упрощается, т. к. в этомслучае имеет
место закон сохранения механич. энергии,
позволяющий установитьпрямую зависимость
между скоростью частицы и её положением
в С. п. с. <м.
Тарг. СИЛОВЫЕ
ЛИНИИ - семейство
кривых, характеризующих
пространственноераспределение векторного
поля сил; направление вектора поля в
каждой точкесовпадает с касательной к
С. л. Т. о., ур-ния С. л. произвольного
векторногополя А
(х, у,z) записываются
в виде:
![]()
Плотность С. л. характеризует интенсивность (величину) силового поля. <Область пространства, ограниченная С. л., пересекающими к.-л. замкнутуюкривую, наз. силовой трубкой. С. л. вихревого поля замкнуты. С. л. потенциальногополя начинаются на источниках поля и заканчиваются на его стоках (источникахотрицат. знака).
Понятие С. л. введено М. Фарадеем при исследовании магнетизма, а затемполучило дальнейшее развитие в работах Дж. К. Максвелла по электромагнетизму. <Согласно представлениям Фарадея и Максвелла, в пространстве, пронизываемомС. л. электрич. и магн. полей, существуют механич. напряжения, соответствующиенатяжению вдоль С. л. и давлению поперёк них. Математически эта концепциявыражена в Максвелла тензоре натяжений эл.-магн. поля.
Наряду с использованием понятия С. л. чаще говорят просто о линиях поля:напряжённости электрич. поля Е, индукции магн. поля В и т. <п., не делая спец. акцента на отношение этих нолей к силам.
ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ
- часть энергии ме-ханич. системы, находящейся в нек-ром силовом поле, зависящая от положения точек (частиц) системы в этом поле, т. е. от их координатили от обобщённых
координат
системы
![]() Численно
Численно
![]() п.
э. системы в данном её положении равна
той работе, к-рую произведут действующие
на систему силы поля при перемещении
системы из этого положения в то, где П.
э. условно принимается равной нулю
(нулевое положение). Из определения
следует, что понятие П. э. имеет место
только для системы, находящейся в
потенциальном силовом поле, в к-ром
работа действующих на систему сил поля
зависит только от начального и конечного
положений системы и не зависит от закона
движения точек системы, в частности от
вида их траекторий. Напр., для механич.
системы, находящейся в однородном поле
тяжести, если ось
п.
э. системы в данном её положении равна
той работе, к-рую произведут действующие
на систему силы поля при перемещении
системы из этого положения в то, где П.
э. условно принимается равной нулю
(нулевое положение). Из определения
следует, что понятие П. э. имеет место
только для системы, находящейся в
потенциальном силовом поле, в к-ром
работа действующих на систему сил поля
зависит только от начального и конечного
положений системы и не зависит от закона
движения точек системы, в частности от
вида их траекторий. Напр., для механич.
системы, находящейся в однородном поле
тяжести, если ось
![]() направлена
вертикально вверх, П. э.
направлена
вертикально вверх, П. э.
![]() где
т-
масса системы, g-
ускорение силы тяжести,
где
т-
масса системы, g-
ускорение силы тяжести,![]() -
координата центра масс (нулевое положение
-
координата центра масс (нулевое положение
![]() =
0); для двух частиц с массами
=
0); для двух частиц с массами
![]() притягивающихся
друг к другу по всемирного
тяготения закону,
притягивающихся
друг к другу по всемирного
тяготения закону,
![]() где
G-
гравитационная постоянная,
где
G-
гравитационная постоянная,![]() -
расстояние между частицами (нулевое
положение
-
расстояние между частицами (нулевое
положение
![]() ).
Аналогично определяется П. э. двух
точечных зарядов
).
Аналогично определяется П. э. двух
точечных зарядов
![]() и
и
![]()
С
силовой ф-цией
![]() П.
э. связана соотношением
П.
э. связана соотношением
![]()
Следовательно,
П. э. и определяет данное потенциальное
силовое поле. Значение силы в любой
точке поля равно градиенту П. э., взятому
со знаком минус; поверхности П = const
являются поверхностями уровня. Работа
сил поля при перемещении системы из
положения, где П. э. равна
![]() в
положение, где П. э. равна П 2,
будет
в
положение, где П. э. равна П 2,
будет
![]() С.
М. Таре.
С.
М. Таре.
Для
системы материальных точек полная
энергия (Гамильтона
функция
)есть сумма кинетической и П. э. Вообще
говоря, это разбиение неоднозначно, но
обычно полагают, что П. э.- это часть
суммы, зависящая только от координат.
Для систем, не имеющих не-посредств.
механич. аналога, П. э.- это слагаемое в
выражении для полной энергии системы,
зависящее только от обобщённых координат.
Напр., для плотности энергии эл.-магн.
поля в вакууме
![]() член
член
![]() не
зависящий от обобщённых импульсов,
не
зависящий от обобщённых импульсов,![]() играет роль П. э.
играет роль П. э.
В квантовой теории ф-ция Гамильтона становится оператором Гамильтона ( гамильтонианом). Его часть
![]() зависящая
только от координат (операторов)
зависящая
только от координат (операторов)![]() интерпретируется как оператор П. э.
Реализация оператора П. э. зависит от
выбора представления; в координатном
представлении - это просто оператор
умножения на числовую ф-цию U(q).
В др. представлениях вид оператора П.
э. может быть более сложным: напр., в
импульсном представлении - это дифференц.
оператор
интерпретируется как оператор П. э.
Реализация оператора П. э. зависит от
выбора представления; в координатном
представлении - это просто оператор
умножения на числовую ф-цию U(q).
В др. представлениях вид оператора П.
э. может быть более сложным: напр., в
импульсном представлении - это дифференц.
оператор
![]() В.
П. Павлов,
В.
П. Павлов,
58.Законы сохранения в динамике
59.Динамика тела. Основные понятия. Моменты инерции тел
60.Дифферециальные уравнения поступательного, вращательного и плоского движения
Динамика твердого тела
Дифференциальные
ур-ния поступательного движения
твердого тела:
![]() и
т.д.
и
т.д.
![]() –
проекция внешней силы. Все точки тела
движутся так же, как и его центр масс С.
Для осуществления поступательного
движения необходимо, чтобы главный
момент всех внешних сил относительно
центра масс был равен 0:
–
проекция внешней силы. Все точки тела
движутся так же, как и его центр масс С.
Для осуществления поступательного
движения необходимо, чтобы главный
момент всех внешних сил относительно
центра масс был равен 0:
![]() =0.
=0.
Дифф-ные
ур-ния вращения твердого тела вокруг
неподвижной оси:
![]() ,
,
Jz
– момент инерции тела относительно оси
вращения z,
![]() –
момент внешних сил относительно оси
вращения (вращающий момент).
–
момент внешних сил относительно оси
вращения (вращающий момент).
![]() ,
– угловое ускорение, чем больше момент
инерции при данном
,
тем меньше ускорение, т.е момент инерции
при вращательном движении является
аналогом массы при поступательном. Зная
,
можно найти закон вращения тела =f(t),
и, наоборот, зная =f(t),
можно найти момент. Частные случаи: 1)
если
=
0, то
= const
– тело вращается равномерно; 2)
=
const,
то
= const
– вращение равнопеременное. Уравнение
аналогичное дифф-ному уравнению
прямолинейного движения точки
,
– угловое ускорение, чем больше момент
инерции при данном
,
тем меньше ускорение, т.е момент инерции
при вращательном движении является
аналогом массы при поступательном. Зная
,
можно найти закон вращения тела =f(t),
и, наоборот, зная =f(t),
можно найти момент. Частные случаи: 1)
если
=
0, то
= const
– тело вращается равномерно; 2)
=
const,
то
= const
– вращение равнопеременное. Уравнение
аналогичное дифф-ному уравнению
прямолинейного движения точки
![]() .
.
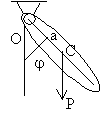
Физический маятник – твердое тело, совершающее колебания вокруг неподвижной горизонтальной оси под действием силы тяжести. Ур-ние вращательного движения:
 ,
обозначая
,
обозначая
 ,
получаем дифф-ное уравнение колебаний
маятника:
,
получаем дифф-ное уравнение колебаний
маятника:
![]() ,
k
– частота колебаний маятника. Рассматривая
малые колебания, можно считать sin
,
тогда
,
k
– частота колебаний маятника. Рассматривая
малые колебания, можно считать sin
,
тогда
![]() –
дифф-ное уравнение гармонических
колебаний. Решение этого уравнения:
= С1coskt
+ C2
sinkt
или
= sin(kt
+ ),
– амплитуда колебаний маятника,
– начальная фаза колебаний. Период
малых колебаний физического маятника
Т= 2/k
= 2
–
дифф-ное уравнение гармонических
колебаний. Решение этого уравнения:
= С1coskt
+ C2
sinkt
или
= sin(kt
+ ),
– амплитуда колебаний маятника,
– начальная фаза колебаний. Период
малых колебаний физического маятника
Т= 2/k
= 2![]() .
Для малых колебаний маятника период не
зависит от угла начального отклонения,
этот результат является приближенным.
Для математического
маятника
(материальной точки, подвешенной на
нерастяжимой нити и движущейся под
действием силы тяжести) имеем дифф.
уравнения движения:
.
Для малых колебаний маятника период не
зависит от угла начального отклонения,
этот результат является приближенным.
Для математического
маятника
(материальной точки, подвешенной на
нерастяжимой нити и движущейся под
действием силы тяжести) имеем дифф.
уравнения движения:
![]() ,
L
– длина нити. Если L=
,
L
– длина нити. Если L=![]() ,
то математический маятник будет двигаться
так же, как и физический (период колебаний
совпадает). Величина L
назыв-ся приведенной длиной физического
маятника. Точка К, отстоящая от оси
подвеса на расстоянии ОК=L,
назыв-ся центром качаний физич. маятника.
Если ось подвеса взять в точке К, то
точка О будет центром качаний и наоборот
– свойство
взаимности.
Расстояние ОК всегда >ОС, т.е. центр
качаний всегда расположен ниже центра
масс
,
то математический маятник будет двигаться
так же, как и физический (период колебаний
совпадает). Величина L
назыв-ся приведенной длиной физического
маятника. Точка К, отстоящая от оси
подвеса на расстоянии ОК=L,
назыв-ся центром качаний физич. маятника.
Если ось подвеса взять в точке К, то
точка О будет центром качаний и наоборот
– свойство
взаимности.
Расстояние ОК всегда >ОС, т.е. центр
качаний всегда расположен ниже центра
масс
Динамика плоского движения твердого тела
Положение тела определяется положением полюса и углом поворота тела вокруг полюса. Дифф-ные уравнения плоского движения тв. тела:
![]() ;
;
![]() ;
;
![]() ,
С – центр масс тела, JC
– момент инерции тела относительно
оси, перпендикулярной плоскости движения
тела и проходящей через его центр масс.
,
С – центр масс тела, JC
– момент инерции тела относительно
оси, перпендикулярной плоскости движения
тела и проходящей через его центр масс.