

79. Режимы работы, механические и рабочие характеристики трёхфазных асинхронных двигателей.
Режимы работы двигателя: продолжительный, кратковременный, повторно-кратковременный.
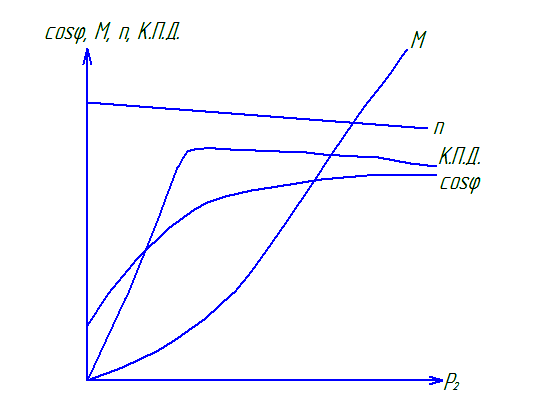
Механической характеристикой называется зависимость частоты вращения ротора n от момента на валу. От её характера зависит пригодность АД для привода различных механизмов. Рабочими характеристиками называют зависимости частоты вращения n, момента на валу М2, тока статора I1, коэффициента полезного действия ƞ и коэффициента мощности cosφ от полезной мощности P2. Эти характеристики служат для полного выявления свойств самого двигателя. Рабочие характеристики изображены на рисунке.
80. Энергетическая диаграмма и к.П.Д. Трёхфазных асинхронных двигателей.
И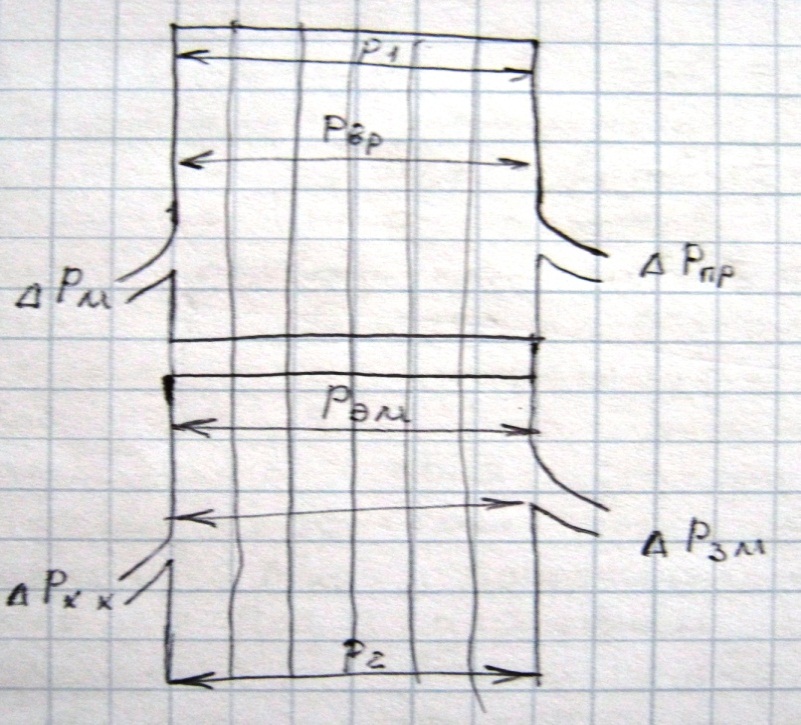 сходная
величина – это мощность Р1 = U1I1cosφ1,
подводимая к двигателю из сети 3-х фазного
тока. Часть этой мощности ΔРпр1 идёт на
нагрев проводников обмотки статора.
Остальная мощность Рврп = Р1 - ΔРпр1
преобразуется в мощность вращающегося
магнитного поля. Из неё часть мощности
ΔРм тратится на потери в магнитопроводе.
Эти потери состоят из потерь на гистерезис
и потерь на вихревые токи. Потери в
сердечнике ротора практической роли
не играют, т.к. они пропорциональны f2,
а f2
очень мало. Таким образом, ротору через
воздушный зазор передаются электромагнитная
мощность Рэм = Рврм – ΔРм. Механическая
мощность, передаваемая ротору Рм = Рэм
– ΔРпр2, где ΔРпр2 – это мощность потерь
в обмотке ротора и полезная мощность
на валу ротора Р2 = Рмех – ΔРмех – ΔРдоб,
где ΔРмех – механические потери, ΔРдоб
– добавочные потери, создаваемые
пульсацией магнитного поля. КПД двигателя
η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРэ) , где ΔРс –
постоянные потери. ΔРс = ΔРм + ΔРмех. ΔРэ
– переменные потери. ΔРэ = ΔРпр1 + ΔРпр2.
сходная
величина – это мощность Р1 = U1I1cosφ1,
подводимая к двигателю из сети 3-х фазного
тока. Часть этой мощности ΔРпр1 идёт на
нагрев проводников обмотки статора.
Остальная мощность Рврп = Р1 - ΔРпр1
преобразуется в мощность вращающегося
магнитного поля. Из неё часть мощности
ΔРм тратится на потери в магнитопроводе.
Эти потери состоят из потерь на гистерезис
и потерь на вихревые токи. Потери в
сердечнике ротора практической роли
не играют, т.к. они пропорциональны f2,
а f2
очень мало. Таким образом, ротору через
воздушный зазор передаются электромагнитная
мощность Рэм = Рврм – ΔРм. Механическая
мощность, передаваемая ротору Рм = Рэм
– ΔРпр2, где ΔРпр2 – это мощность потерь
в обмотке ротора и полезная мощность
на валу ротора Р2 = Рмех – ΔРмех – ΔРдоб,
где ΔРмех – механические потери, ΔРдоб
– добавочные потери, создаваемые
пульсацией магнитного поля. КПД двигателя
η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРэ) , где ΔРс –
постоянные потери. ΔРс = ΔРм + ΔРмех. ΔРэ
– переменные потери. ΔРэ = ΔРпр1 + ΔРпр2.
КПД двигателя изменяется в зависимости от нагрузки двигателя. Коэффициент нагрузки β = Р2 / Р2ном. С учётом коэффициента нагрузки η = βР2 / (βР2 + ΔРс + β2 ΔРэ).
График зависимости КПД от β
О бычно
КПД = 0,75 – 0,95.
бычно
КПД = 0,75 – 0,95.
С ростом нагрузки cosφ = P1 / S1 = P1 / (P12 + Q12)0.5 = 1 / (1 + (Q12 / P12)) растёт, т.к. растёт Р1, а Q1 остаётся постоянной. При дальнейшем росте β растёт поток рассеяния магнитного потока, поэтому растёт Q1, а cosφ уменьшается. АД целесообразно использовать при нагрузках близких к номинальным (β = 1).
вверх 81. Способы регулирования скорости трёхфазных асинхронных двигателей.
Запишем
формулу для определения скорости
вращения: .
.
Частоту
вращения асинхронного двигателя можно
регулировать изменением скольжения
 ,
числа пар полюсов
,
числа пар полюсов
 и
частоты тока питающей сети
и
частоты тока питающей сети
 .
.
Изменения скольжения можно достичь 3 способами:
изменением подводимого к статору симметричного напряжения U1;
При
неизм. моменте на валу двигателя повышение
напряжения вызывает повышение частоты
вращения двигателя, но диапазон изменения
частоты получается небольшим, что
обьясняется узкой зоной устойчивой
работы двигателя. Кроме того, значит.
увеличение напряжения вызывает перегрев
двигателя, а снижение напряжения снижает
перегрузочную способность
 .
.
нарушением симметрии этого напряжения;
Нарушение симметрии подводимого напряжения осуществляется с помощью автотрансформатора, включённого в одну из фаз. При уменьшении напряжения на входе автотрансформатора напряжение на выходе автотрансформатора несимметрично увеличивается, а частота вращения уменьшается. Недостатками являются уменьшение КПД двигателя и узкая зона регулирования. Применяется для АД небольшой мощности.
изменением активного сопротивления цепи ротора.
Применяется для АД с фазным ротором.
Регулирование частоты вращения изменением частоты тока питающей сети (частотное регулирование).
Для этого необходимы источники питания с регулируемой частотой тока, в качестве которых применяются полупроводниковые и электромагнитные преобразователи частоты. Но с изменением частоты тока изменяется и электромагнитный момент двигателя, поэтому для сохранения момента, коэффициента мощности и КПД двигателя необходимо одновременно изменять и напряжение сети. Если регулирование производится при условии постоянной нагрузки, то напряжение нужно изменять пропорционально частоте. Частотное регулирование позволяет плавно изменять скорость вращения в широком диапазоне.
Изменение частоты вращения путём изменения числа пар полюсов.
Этот способ применяется лишь для АД с короткозамкнутым ротором и даёт лишь ступенчатое регулирование частоты. Изменение числа пар полюсов производиться двумя способами:
в пазы статора укладываются две обмотки с разным числом пар полюсов, не связанных электрически между собой. Включая разные обмотки в сеть, получают разные частоты вращения. Недостатками метода являются: увеличение габаритов и массы АД;
в пазах статора размещена одна обмотка, схема которой путём переключения позволяет уменьшить число пар полюсов, например, обмотка фазы состоит из двух катушек, при их последовательном соединении =2, а при параллельном =1. Начала и концы обмоток выводят на клеммы щитка, поэтому переключение может производиться при работающем двигателе.