

49. Расчет сил инерции.
Силы инерции возникают во всех случаях, когда звенья движутся непрямолинейно и/или неравномерно. Рассмотрим три вида движения звеньев.
П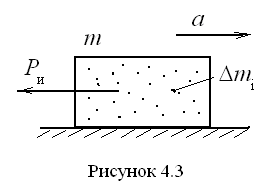 о с т у п а т е л ь н о е д в и ж е н и е з
в е н а.
Этот
вид движения чаще всего относится к
ползунам, движущимся относительно
прямолинейных направляющих (рис. 4.3).
Пусть при этом
– масса ползуна,
о с т у п а т е л ь н о е д в и ж е н и е з
в е н а.
Этот
вид движения чаще всего относится к
ползунам, движущимся относительно
прямолинейных направляющих (рис. 4.3).
Пусть при этом
– масса ползуна,
 – его ускорение.
– его ускорение.
Сила
инерции элементарной массы звена
 .
Если просуммировать все элементарные
силы инерции данного ползуна, то есть
найти сумму
.
Если просуммировать все элементарные
силы инерции данного ползуна, то есть
найти сумму
 ,
то получится главный вектор сил инерции
звена, равный
,
то получится главный вектор сил инерции
звена, равный
 .
То есть сила инерции звена в его
поступательном движении равна массе
звена, помноженной на его ускорение.
Знак «−» в правой части формулы указывает
на противоположность направления силы
инерции по отношению к ускорению.
.
То есть сила инерции звена в его
поступательном движении равна массе
звена, помноженной на его ускорение.
Знак «−» в правой части формулы указывает
на противоположность направления силы
инерции по отношению к ускорению.
В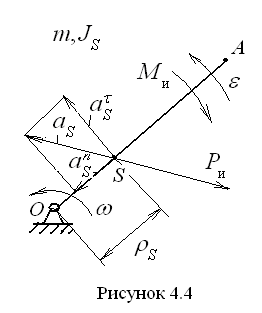 р а щ а т е л ь н о е д в и ж е н и е з в е
н а.
В
этом движении находятся кривошипы,
кулисы, коромысла и другие звенья
механизмов. Возьмём стержневое звено
ОА, вращающееся вокруг неподвижной
точки О. Масса звена равна
,
момент инерции относительно центра
масс S
равен
р а щ а т е л ь н о е д в и ж е н и е з в е
н а.
В
этом движении находятся кривошипы,
кулисы, коромысла и другие звенья
механизмов. Возьмём стержневое звено
ОА, вращающееся вокруг неподвижной
точки О. Масса звена равна
,
момент инерции относительно центра
масс S
равен
 .
Вращение происходит с угловой скоростью
и угловым ускорением
.
Вращение происходит с угловой скоростью
и угловым ускорением
 .
Расстояние между центром масс и центром
вращения равно
.
Расстояние между центром масс и центром
вращения равно
 .
.
Вычислим
ускорение, с которым движется центр
масс S.
Его нормальное ускорение равно
 ,
тангенциальное ускорение равно
,
тангенциальное ускорение равно
 .
Полное ускорение
.
Полное ускорение
 .
Результатом этого ускорения является
сила инерции, приложенная в центре масс
и направленная противоположно ускорению
.
Результатом этого ускорения является
сила инерции, приложенная в центре масс
и направленная противоположно ускорению
 .
.
Угловое
ускорение звена вызывает появление
инерционного момента, направленного
по отношению к нему в противоположную
сторону
 .
.
В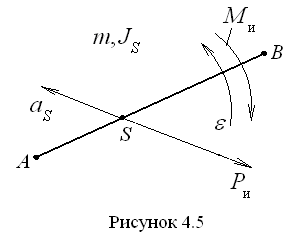 этой формуле момент инерции принимается
относительно центра вращения и
определяется как
этой формуле момент инерции принимается
относительно центра вращения и
определяется как
 .
.
П л о с к о-п а р а л л е л ь н о е д в и ж е н и е з в е н а. Такое движение совершают чаще всего шатуны механизмов. Масса шатуна равна , момент инерции относительно центра масс равен .
Звено
движется, имея угловое ускорение
и ускорение центра масс
 .
Аналогично вращательному движению в
этом случае также будут действовать
оба инерционных фактора: сила инерции
.
Аналогично вращательному движению в
этом случае также будут действовать
оба инерционных фактора: сила инерции
 ,
противоположная ускорению центра масс,
и момент сил инерции
,
противоположная ускорению центра масс,
и момент сил инерции
 ,
противоположный угловому ускорению.
,
противоположный угловому ускорению.
Замечание. Как видим, для расчёта сил инерции необходимо знать ускорения, с которыми движутся звенья механизма.
50.Виды дисбаланса роторов и способы их уравновешивания.
Неуравновешенным будем называть такой механизм (или его звено), в котором при движении центр масс механизма (или звена) движется с ускорением.
Неуравновешенность - такое состояние механизма при котором главный вектор или главный момент сил инерции не равны нулю. Различают:
статическую неуравновешенность FSм не равно 0 ;
моментную неуравновешенность Mимне равно 0 ;
динамическую неуравновешенность FSм¹не равно 0 и Mимне равно 0 .
В зависимости от взаимного расположения оси вращения и главной цетральной оси инерции x-x , различают следующие виды неуравновешенности роторов - статическую, когда эти оси параллельны; - моментную, когда оси пересекаются в центре масс ротора S; - динамическую, когда оси либо пересекаются вне центра масс, либо не пересекаются, а перекрещиваются в пространстве.
|
2.2. Моментная неуравновешенность.
|
|
При моментной неуравновешенности главная центральная ось инерции пересекает ось вращения в центре масс ротора точке S, главный вектор дисбалансов Dс равен нулю, гавный момент дисбалансов МD не равен нулю т.е. необходимо уравновесить только момент дисбалансов МD . Для этого достаточно разместить на роторе две одинаковых корректирующих массы mk на равных расстояниях от оси вращения ek и от ценра масс S - lk. Массы выбираются и размещаются так, чтобы момент их дисбалансов MDk был по величине равен, а по направлению противоположен моменту дисбалансов ротора МD:
|
где Dk = mk ek . В этих зависимостях величинами lk и ek задаются по условиям удобства размещения противовесов на роторе, а величину mk рассчитывают. Необходимо отметить, что величины Dk в плоскостях коррекции необязательно должны быть равными, необходимо выполнять только неизменность положения центра масс - он должен оставаться на оси вращения.
|
|
В и д ы н е у р а в н о в е ш е н н о с т и. На рис. 7.4. представлен диск с центром масс в точке S. Через центр масс проходят три взаимно перпендикулярные оси I-I, II-II и III-III, называемые центральными главными осями инерции.
О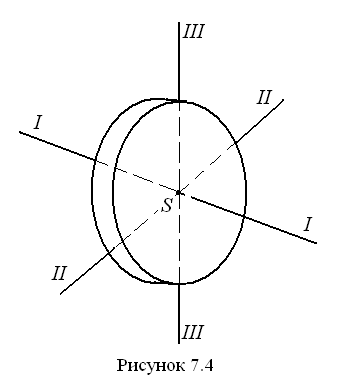 днако
оси инерции могут быть одновременно и
центральными, и главными. Такие оси и .
днако
оси инерции могут быть одновременно и
центральными, и главными. Такие оси и .
Если ось вращения диска совпадает с любой из этих осей инерции, то диск полностью уравновешен. Если ось вращения совпадает с одной из главных осей инерции, но не является центральной (не проходит через центр масс), то имеет место статическая неуравновешенность. Этот вид неуравновешенности легко обнаруживается в статическом состоянии. Если оставить звено свободно вращаться в опорах, то оно будет поворачиваться до тех пор, пока его центр масс не займёт наинизшее положение.
Для приведения в состояние уравновешенности в этом случае требуется установка одного противовеса, который должен переместить ось вращения в центр масс S.
Если ось вращения диска проходит через центр масс (является центральной осью инерции), но не совпадает ни с одной из главных осей, то имеет место динамическая неуравновешенность. В статике её обнаружить невозможно, но если привести диск во вращение, то возникающая пара центробежных сил инерции, создающая неуравновешенный момент, проявит себя в полной мере. В связи с тем, что эта неуравновешенность выявляется в движении (в динамике), она называется динамической. Для динамического уравновешивания требуется установка двух противовесов, создающих момент, противоположный неуравновешенному.
Существует и так называемый общий случай неуравновешенности, объединяющий первые два. Он возникает, если ось вращения звена не является центральной осью инерции и не совпадает ни с одной из его главных осей. Чтобы устранить такую неуравновешенность, требуется три противовеса: один – для статического уравновешивания и два – для динамического.
У
с т р а н е н и е с т а т и ч е с к о й н е
у р а в н о в е ш е н н о с т и.
Пусть конструкция вращающегося звена
такова, что оно имеет три неуравновешенные
массы
 ,
,
 и
и
 ,
вращающиеся вокруг неподвижной точки
O
на радиусах
,
вращающиеся вокруг неподвижной точки
O
на радиусах
 ,
,
 и
и
 соответственно (рис. 7.5, а). Центробежные
силы инерции данных масс определяются
формулами:
соответственно (рис. 7.5, а). Центробежные
силы инерции данных масс определяются
формулами:


 Так как достигнутое уравновешивание
действует при любой угловой скорости,
то в дальнейшем принимаем
Так как достигнутое уравновешивание
действует при любой угловой скорости,
то в дальнейшем принимаем
 .
Тогда
.
Тогда
 ,
,
 и
и
 .
Определим равнодействующую сил инерции,
которую обозначим
.
Определим равнодействующую сил инерции,
которую обозначим
 .
Она равна векторной сумме
.
Она равна векторной сумме
 .
Построив в масштабе
.
Построив в масштабе
 многоугольник сил инерции (рис. 7.5, б),
находим
.
Условие статической уравновешенности
звена запишется здесь так:
многоугольник сил инерции (рис. 7.5, б),
находим
.
Условие статической уравновешенности
звена запишется здесь так:
 ,
то есть необходимо установить на звене
такой противовес, который бы создавал
силу инерции, равную и противоположно
направленную равнодействующей сил
инерции. Поэтому измеряем вектор
,
то есть необходимо установить на звене
такой противовес, который бы создавал
силу инерции, равную и противоположно
направленную равнодействующей сил
инерции. Поэтому измеряем вектор
 и,
умножая его на масштаб
,
находим величину силы инерции противовеса.
План сил даёт также ответ на вопрос: где
должен располагаться противовес на
звене: линия его расположения определяется
направлением вектора
на плане сил. Перенеся эту линию на
звено, выбираем радиус установки
,
не выходящий за габариты звена, и находим
массу противовеса:
и,
умножая его на масштаб
,
находим величину силы инерции противовеса.
План сил даёт также ответ на вопрос: где
должен располагаться противовес на
звене: линия его расположения определяется
направлением вектора
на плане сил. Перенеся эту линию на
звено, выбираем радиус установки
,
не выходящий за габариты звена, и находим
массу противовеса:
 .
На рис. 7.5, а противовес изображён в виде
прямоугольника.
.
На рис. 7.5, а противовес изображён в виде
прямоугольника.
У
с т р а н е н и е д и н а м и ч е с к о й н
е у р а в н о в е ш е н н о с т и.
Пусть вращающееся звено имеет форму
коленчатого вала поршневой машины (рис.
7.9, а). Центры масс колен вала отмечены
буквами S1
и S2.
Общий центр масс вала S
располагается на его геометрической
оси, совпадающей с осью вращения. Поэтому
вал статически уравновешен. Однако при
вращении шатунные шейки испытывают
действие центробежных сил инерции
 и
и
 ,
где
и
– неуравновешенные массы шатунных шеек
вала, причём
,
где
и
– неуравновешенные массы шатунных шеек
вала, причём
 ,
и
– расстояния между центрами масс шеек
и осью вращения вала, здесь также
,
и
– расстояния между центрами масс шеек
и осью вращения вала, здесь также .
Эти силы, равные по величине и направленные
противоположно друг другу, образуют
пару сил с моментом
.
Эти силы, равные по величине и направленные
противоположно друг другу, образуют
пару сил с моментом
 ,
где
,
где
 – кратчайшее расстояние (плечо) между
силами пары.
– кратчайшее расстояние (плечо) между
силами пары.
З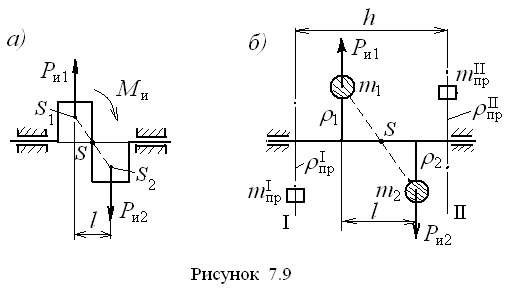 адача
уравновешивания в данном случае
заключается в создании дополнительного
момента
адача
уравновешивания в данном случае
заключается в создании дополнительного
момента
 за счет противовесов, который должен
быть равным и противоположно направленным
моменту
за счет противовесов, который должен
быть равным и противоположно направленным
моменту
 .
.
Таким
образом, условием уравновешенности
вала является равенство
 .
Противовесы располагаются в плоскостях
исправления I
и II
(рис. 7.9, б), как правило, совпадающих
с торцами звена (детали). Пусть при этом
расстояние между торцевыми поверхностями
составляет величину
.
Противовесы располагаются в плоскостях
исправления I
и II
(рис. 7.9, б), как правило, совпадающих
с торцами звена (детали). Пусть при этом
расстояние между торцевыми поверхностями
составляет величину
 .
Тогда можно записать
.
Тогда можно записать
 .
.
Здесь
также имеют место равенства
 и
и
 ,
поэтому можно применить одно обозначение
для масс противовесов –
,
поэтому можно применить одно обозначение
для масс противовесов –
 и одно обозначение для радиусов –
.
Исходя из условия уравновешенности,
имеем равенства модулей произведений
и одно обозначение для радиусов –
.
Исходя из условия уравновешенности,
имеем равенства модулей произведений
 ,
откуда находим
,
откуда находим

Из этой формулы следует, что, имея , необходимо задаться радиусами установки противовесов и рассчитать их массу. Далее следует установить оба противовеса в плоскостях исправления I и II, как показано на рис. 7.9, б.