

1.Основные понятия и определения: звено, кинематическая пара, кинематическая цепь, механизм, машина. Классификация машин по функциональному назначению. Понятия направляющего и передаточного механизмов.
Звено - деталь или неск. деталей жестко связанных между собой.
Кинематич.пара - соединение 2х звеньев, допускающее их относительное перемещение. Низшие пары могут быть выполнены соприкосновением звеньев по поверхностям или по плоскостям. Высшие – соприкосновением по линиям или в точках. Кинем.цепь - связанная сист. звеньев, входящих в кинематические пары.
Механизм - кинем.цепь, имеющая одно неподвижное звено(стойку) и совершающая вполне определенное целесообразное движение.
Машина есть устройство, создаваемое человеком для использования законов природы с целью облегчения физического и умственного труда, увеличения его производительности путем частичной или полной замены человека в его трудовых и физиологических функциях.
Все существующие машины можно разделить на следующие группы:
I. Энергетические. В них происходит преобразование энергии из одного вида в другой (например, электрогенераторы, электродвигатели, двигатели внутреннего сгорания любого типа, паровые и газовые турбины и т. д.).
II. Технологические. Они предназначены для изменения формы, размеров и физических свойств материалов (металлорежущие станки, полиграфические машины и др.). Эти машины составляют самую многочисленную группу.
III. Транспортные. Эти машины служат для перемещения всевозможных изделий, материалов и людей (автомобили, самолёты).
IV. Логические (информационные). Машины, составляющие эту группу, служат для хранения, переработки и передачи информации (ЭВМ, компьютеры).
V. Кибернетические. Для замены человека в его трудовых и физиологических функциях (аппараты: искусственное сердце, искусственные почки и др.).
ТММ изучает те машины и механизмы, которые функционируют на основе законов механики, отсюда другое название ТММ – механика машин.
Машина, как правило, состоит из одного или нескольких механизмов, основное назначение которых – преобразование движения (с одновременным преобразованием сил).
Механизм называется плоским, если все его звенья движутся параллельно одной плоскости и траектории всех его точек – плоские кривые. В противном случае механизм пространственный.
Передаточным называется механизм, предназначенный для воспроизведения заданной функциональной зависимости между перемещениями входного и выходного звеньев. Направляющим называется механизм, у которого траектория определенной точки звена, образующего кинематические пары только с подвижными звеньями, совпадает с заданной кривой.
2.Классификация звеньев и их условные изображения на кинематических схемах.
Звеном (кинематической цепи, механизма) называют деталь или группу жестко соединенных между собой деталей.
Звено механизма, неподв в выбранной системе координат, называется стойкой.
Подвижные звенья сочленяются со стойкой и между собой посредством кинематических пар. Кинематич.пара - соединение 2х звеньев, допускающее их относительное перемещение.
Среди звеньев механизма выделяют входные, выходные, ведущие, ведомые и промежуточные звенья.
Входные - это звенья, движение которых преобразуется механизмом в заданное движение других звеньев.
Выходные - звенья, движение которых обеспечивает данный механизм.
Ведущие – звенья, закон движения которых известен.
Ведомые – звенья, закон движения которых надо определить.
Промежуточные – все остальные.
Звенья на кинематических схемах изображаются в соответствии со стандартами.
Стойка обязательно штрихуется, может изображаться в нескольких местах схемы.
На кинематич схеме выдерживаются кинематические размеры-размеры, определяющие движение выходного звена.
Звенья могут иметь самые различные конструкции.
Свои названия звенья получают в зависимости от характера их движения в механизме или от особенностей их конструкции:
кривошип - звено, совершающее полный оборот вокруг неподвижной оси, связанной со стойкой;
коромысло - звено, совершающее вращательное движение вокруг неподвижной оси в ограниченных пределах (возвратно-вращательное);
шатун - звено, совершающее сложное движение;
ползун - звено, поступательно перемещающееся по неподвижной направляющей относительно стойки;
кулиса - подвижное звено механизма, содержащее направляющую для поступательного движения другого звена (кулисного камня);
кулачок - звено, содержащее поверхность переменной кривизны;
зубчатое колесо - вращающееся звено, имеющее зубчатый венец.
3.Классификация кинематических пар и их условные обозначения.
К л а с с и ф и к а ц и я п о ч и с л у у с
л о в и й с в я з е й. Свободное твердое
тело в пространстве имеет шесть
степеней свободы. Это – три поступательных
движения и три вращательных движения
вокруг этих осей. Можно также сказать,
что на свободное твёрдое тело не наложено
ни одной связи. Если обозначить число
степеней свободы
буквой
л а с с и ф и к а ц и я п о ч и с л у у с
л о в и й с в я з е й. Свободное твердое
тело в пространстве имеет шесть
степеней свободы. Это – три поступательных
движения и три вращательных движения
вокруг этих осей. Можно также сказать,
что на свободное твёрдое тело не наложено
ни одной связи. Если обозначить число
степеней свободы
буквой
 ,
а число
связей
буквой
,
а число
связей
буквой
 ,
то для свободного твёрдого тела можно
записать:
=
6,
= 0.
,
то для свободного твёрдого тела можно
записать:
=
6,
= 0.
Неподвижное твёрдое тело имеет = 0, = 6.
Ограничения, наложенные на относительное движение звеньев в кинематической паре, называются условиями связей.
В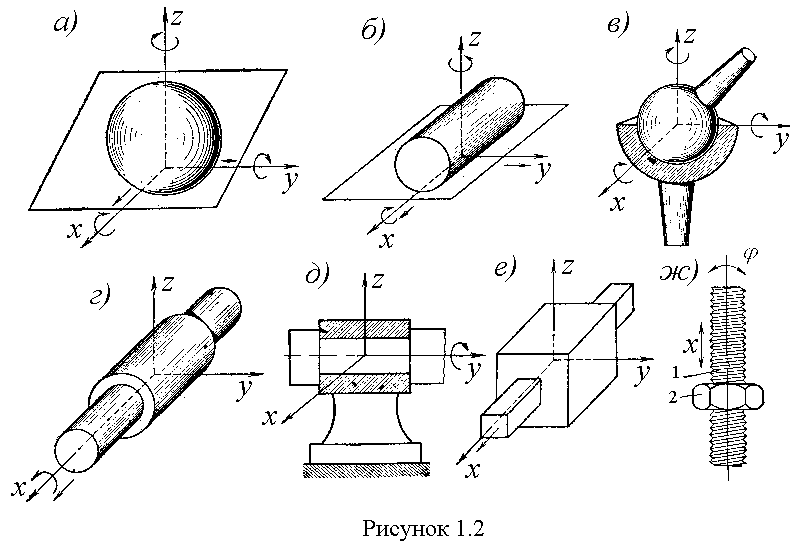 кинематических парах количества степеней
свободы и условий связей могут быть от
единицы до пяти, однако в сумме это
количество во всех парах может быть
равным только шести. Класс
кинематической пары определяется
количеством в ней условий связей.
В соответствии с количеством возможных
движений кинематическая пара называется
одноподвижной, двухподвижной и так
далее. На рис. 1.2, шар, не может двигаться
вдоль оси z
(
=
1,
= 5), паре первого класса или пятиподвижной.
На рис. 1.2, б (
=
2,
=
4) - четырёхподвижная кинематическая
пара или пара второго класса. На рис.
1.2, в - третьего класса или трёхподвижная,
на рис. 1.2, г − кинематическая пара
четвёртого класса или двухподвижная,
на рис.1.2, д – кинематическая пара пятого
класса или одноподвижная, называемая
вращательной парой и на рис. 1.2, е – также
кинематическая пара пятого класса,
называемая поступательной парой. На
рис. 1.2, ж изображена винтовая кинематическая
пара, обладающая двумя движениями,
однако в ней независимым является одно
движение (вращательное), поэтому она
относится к пятому классу.
кинематических парах количества степеней
свободы и условий связей могут быть от
единицы до пяти, однако в сумме это
количество во всех парах может быть
равным только шести. Класс
кинематической пары определяется
количеством в ней условий связей.
В соответствии с количеством возможных
движений кинематическая пара называется
одноподвижной, двухподвижной и так
далее. На рис. 1.2, шар, не может двигаться
вдоль оси z
(
=
1,
= 5), паре первого класса или пятиподвижной.
На рис. 1.2, б (
=
2,
=
4) - четырёхподвижная кинематическая
пара или пара второго класса. На рис.
1.2, в - третьего класса или трёхподвижная,
на рис. 1.2, г − кинематическая пара
четвёртого класса или двухподвижная,
на рис.1.2, д – кинематическая пара пятого
класса или одноподвижная, называемая
вращательной парой и на рис. 1.2, е – также
кинематическая пара пятого класса,
называемая поступательной парой. На
рис. 1.2, ж изображена винтовая кинематическая
пара, обладающая двумя движениями,
однако в ней независимым является одно
движение (вращательное), поэтому она
относится к пятому классу.
 При
переходе из пространственной системы
в плоскую твёрдое тело теряет три степени
свободы, что означает, что на него
наложено три связи. Так что свободное
твёрдое тело в плоскости имеет
=
3 и
=
3. В плоской кинематической паре количество
ограничений в движении звена может быть
или два, или одно. В первом случае общее
количество условий связей вместе с
тремя потерянными при переходе из
пространства в плоскость составляет
= 5. Такая кинематическая пара является
парой 5-го класса, а так как в ней может
выполняться только одно движение (
= 1), одноподвижной кинематической парой.
При
переходе из пространственной системы
в плоскую твёрдое тело теряет три степени
свободы, что означает, что на него
наложено три связи. Так что свободное
твёрдое тело в плоскости имеет
=
3 и
=
3. В плоской кинематической паре количество
ограничений в движении звена может быть
или два, или одно. В первом случае общее
количество условий связей вместе с
тремя потерянными при переходе из
пространства в плоскость составляет
= 5. Такая кинематическая пара является
парой 5-го класса, а так как в ней может
выполняться только одно движение (
= 1), одноподвижной кинематической парой.
Во втором случае общее количество условий связей = 4, и кинематическая пара является парой 4-го класса, а в соответствии с = 2 она называется двухподвижной кинематической парой (рис. 1.4).
К л а с с и ф и к а ц и я п о х а р а к т е р у к а с а н и я э л е м е н т о в.
Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми одно звено входит в касание с другим звеном при образовании кинематической пары. Если касание элементов кинематической пары происходит по линии или в точке, то кинематическая пара высшая (пары 1-го, 2-го классов в пространстве и пара 4-го класса в плоскости), если касание происходит по поверхности, то кинематическая пара низшая (пары 3-го, 4-го и 5-го классов).
Механизмы с высшей кинематической парой передают меньшие нагрузки, но имеют малые потери на трение и легко проектируются. Элементы этих пар сложны в изготовлении.
Механизмы с низшими кинематическими парами передают большие нагрузки, имеют большие потери на трение, сложнее синтезируются. Элементы низших пар имеют простые формы в виде плоскостей, цилиндрических поверхностей, поэтому более просты в изготовлении.
4.Классификация кинематических цепей. Примеры.
Кинематической цепью называется ряд звеньев, соединённых между собой кинематическими парами. Кинематические цепи бывают пространственные и
плоские, простые и сложные, замкнутые и разомкнутые (закрытые и открытые).
Если звенья кинематической цепи движутся параллельно одной плоскости, то такая кинематическая цепь – плоская, в противном случае кинематическая цепь – пространственная. В простой кинематической цепи каждое звено входит не более чем в две кинематические пары.
В замкнутой кинематической цепи нет звеньев, входящих только в одну кинематическую пару, в разомкнутой цепи имеются такие звенья.