

Преобразователь частоты 1336Plus
Серия ПЧ 1336Plus фирмы Allen Bradley предназначена для управления асинхронными электродвигателями мощностью 0.37 - 450 кВт в трех диапазонах напряжений 200 - 240 В, 380-480 В и 500-600 В, частотой 50/60 Гц трехфазной сети. Основные характеристики этой серии ПЧ приведены в табл. 8.1.
На рис. 8.2 приведён разъём Х1 ПЧ 1336Plus (мощность 5,5 кВт), который предназначен для подключения силовой части ПЧ к сети (клеммы R, S, T) и электродвигателя к ПЧ (клеммы U, V, W). Клеммы DC+ и DC- используются для подключения источника постоянного тока, используемого для динамического торможения. Разъём располагается на силовой плате ПЧ.
Разъём Х2 предназначен для подачи входных сигналов задания скорости и вывода сигналов состояния ПЧ (рис. 8.3). Назначение сигналов приведено в табл. 8.2. Разъём располагается на процессорной плате ПЧ.
Пример схемы подключения ПЧ 1336Plus к контроллеру SLC500 фирмы Allen Bradley приведён на рис. 8.4.
На схеме показаны следующие устройства: А1 - модуль связи 1203-GD1, А2 - промышленный модульный контроллер SLC500 фирмы Allen Bradley, А3 - преобразователь частоты 1336Plus, А4 - ПЭВМ, А5 - внешний блок питания.
Таблица 8.1. Основные характеристики ПЧ 1336 Plus
Наименование |
Значение |
Мощность, кВт |
0,37 - 450 |
Напряжение питания (входное), В |
3х (380 – 460) -10 % / + 10 % |
Напряжение выхода, В |
от 0 до входного |
Токовая перегрузка |
20 – 160 % от номинального тока |
Регулятор |
ПИ |
Тип управления |
Линейный (U/f) |
Способ модуляции |
ШИМ |
Частота модуляции, кГц |
2 - 6 |
Тормоз постоянного тока |
Динамическое торможение |
Многоскоростной режим |
7 скоростей |
Количество параметров настройки |
225 |
Выходная частота, Гц |
0 -400 |
Скоростью двигателя управляют: с пульта оператора; посредством удалённого потенциометра; подключением устройств, формирующих аналоговые сигналы 0-10 В или 4-20 мА либо импульсы частотой 0 -100 кГц |
|
Количество аналоговых/дискретных выходов |
1/3 |
Функции защиты |
Перегрузка по току; перенапряжение; превышение рабочей температуры IGBT модулей; короткое замыкание; обрыв фазы. |
Способ управления |
Пульт/Внешние команды/ Подключение через дополнительный модуль к сети Remote I/O |
Условия окружающей среды |
0 …+40 0С |
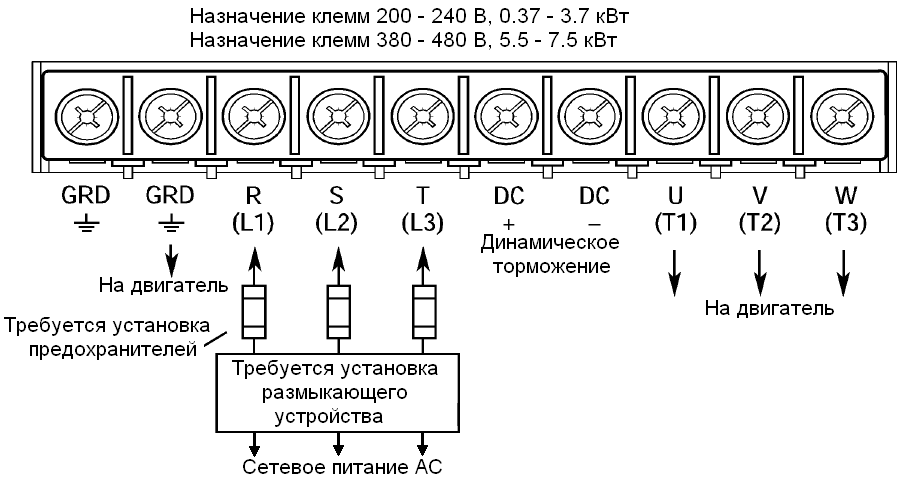
Рис. 8.2. Разъём Х1 преобразователя частоты 1336Plus
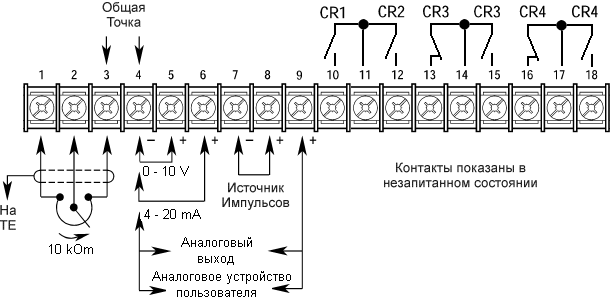
Рис. 8.3. Разъём Х2 преобразователя частоты 1336Plus
Таблица 8.2. Наименование и назначение сигналов ПЧ 1336Plus
Мощность, кВт |
0,37 - 450 |
Напряжение питания (входное), В |
3х (380 – 460) -10 % / + 10 % |
Напряжение выхода, В |
от 0 до входного |
Токовая перегрузка |
20 – 160 % от номинального тока |
Регулятор |
ПИ |
Тип управления |
Линейный (U/f) |
Способ модуляции |
ШИМ |
Частота модуляции, кГц |
2 - 6 |
Тормоз постоянного тока |
Динамическое торможение |
Многоскоростной режим |
7 скоростей |
Количество параметров настройки |
225 |
Выходная частота, Гц |
0 -400 |
Скоростью двигателя управляют: с пульта оператора; посредством удалённого потенциометра; подключением устройств, формирующих аналоговые сигналы 0-10 В или 4-20 мА либо импульсы частотой 0 -100 кГц |
|
Количество аналоговых/дискретных выходов |
1/3 |
Функции защиты |
Перегрузка по току; перенапряжение; превышение рабочей температуры IGBT модулей; короткое замыкание; обрыв фазы. |
Способ управления |
Пульт/Внешние команды/ Подключение через дополнительный модуль к сети Remote I/O |
Условия окружающей среды |
0 …+40 0С |
Модуль связи 1203-GD1 (ser B) - это устройство интерфейса RIO, предназначенное, для обеспечения последовательной цифровой связи между программируемым контроллером SLC500 и любым устройством, использующим коммуникационный порт SCANport.
Модульный контроллер SLC500 предназначен для управления технологическим оборудованием и приводом 1336PLUS. Ниже приведена конфигурация контроллера SLC 500, приведённого на рис. 8.4. Цифрами 0 - 5 обозначены слоты контроллера, в которые установлены модули:
0 - 1747 - L541 5/04 CPU 16K Mem.OS401 - процессорный модуль;
1 - Модуль отсутствует (место зарезервировано);
2 - 1746 - IB16 16 - Input (SINK) 24 VDC - модуль входных сигналов;
3 - 1746 - OB16 16 - Output (TRANS-SRC) 10/50 VDC - модуль выходных сигналов;
4 - 1746 - NIO4I Analog 2 Ch In / 2 Ch Current Out - модуль аналоговых сигналов;
5 - 1747 SN – RIO - сканер.
Модули контроллера устанавливаются в шасси 1746 - A7 & - Slot Rack.
Модуль входных сигналов имеет индикаторы состояния входов, а модуль выходных сигналов - индикаторы состояния выходов. Входной и выходной модули работают с входными/выходными напряжениями 24 В dc.
К модулю входных сигналов подключены нормально разомкнутые контакты состояния ПЧ CR1, CR2, CR3 и CR4. На контакты подано питание 24 В постоянного тока от внешнего изолированного источника А5.
Модуль 1747SN RIO - модуль сканера, предназначен для организации магистрального канала Remote I/O (RIO) для подключения удалённых устройств. Всего к магистрали RIO может быть подключено до 32 устройств.
Сканер 1747SN RIO действует как интерфейс между устройствами Device Net (привод 1336PLUS) и процессором и обеспечивает: ввод входных сигналов от устройств (потребляемый ток, частота вращения и т.д.), вывод выходных сигналов в устройства (пуск, стоп, толчок, скорость и др.), ввод данных о конфигурации устройств, контроль рабочего состояния устройств.
К модулю сканера 1747SN RIO экранированной витой парой подключён модуль связи 1203-GD1. На разъёмах сканера и модуля связи установлены согласующие резисторы R2 и R3.
Разъёмы Scanport ПЧ и модуля связи объединяются специальным кабелем, поставляемым вместе с ПЧ.
Процессорный модуль контроллера SLC500 посредством канала RS232C связан с ПЭВМ.
На ПЭВМ должно быть установлено следующее программное обеспечение:
RSLogix 500 - среда для программирования микроконтроллеров SLC500;
RSLogix Emulate - отладчик управляющих программ;
RS Linx - драйвер связи.
Обязательными для работы с контроллером и, соответственно, для управления ПЧ являются программы RSLogix 500 и RS Linx. Программа RSLogix Emulate позволяет лишь в первом приближении отладить правильность выполнения управляющей программы. Окончательная отладка программы осуществляется после её загрузки в микроконтроллер SLC500.
Устройства А1, А2 и А5 через предохранитель FU4 и автомат QF1 подключены к сети 220 В переменного тока.
ПЧ 1336PLUS через автомат QF2 и предохранители FU1-FU3 подключён к переменному трёхфазному напряжению 380В. К ПЧ (клеммы Т1, Т2, Т3) подключен трёхфазный асинхронный электродвигатель M.
К разъёму платы управления Х2.1 ПЧ присоединены: переменный резистор R1 (10 кОм) и токовый выход OUT1 модуля аналоговых сигналов 1746 NIO4I контроллера SLC500, которые могут использоваться в качестве задатчика скорости (выбор конкретного задатчика скорости осуществляется программно в ПЧ); аналоговый вход IN1 модуля 1746NIO4I контроллера SLC500, используемый для определения действительной скорости вращения двигателя. Задатчик скорости по напряжению в схеме не используется.
Подключение аналоговых сигналов к ПЧ осуществляется экранированными проводами.
Контроллер SLC500 имеет дополнительные модули, которые могут подключаться к процессорной плате ПЧ: модуль фотоэлектрического измерительного преобразователя (ФИП), модуль входных дискретных сигналов.
Модуль ФИП вместе с преобразователем предназначен для точной стабилизации процесса регулирования при низких скоростях.
Модуль входных дискретных сигналов предназначен для подачи сигналов управления приводом (пуск, стоп, толчок, 7 дискретных скоростей) от модуля выходных дискретных сигналов контроллера без организации канала RIO (управление без модуля 1747 SN RIO).
Рис. 8.4. Схема подключения ПЧ 1336Plus к контроллеру SLC500 и ПЭВМ