

16 Монтаж тензо датчиков для изм напряжений в элементах инж констр
17 Тарировка измерительных схем
18 Реле, классификация реле. Мех. И тепловые реле
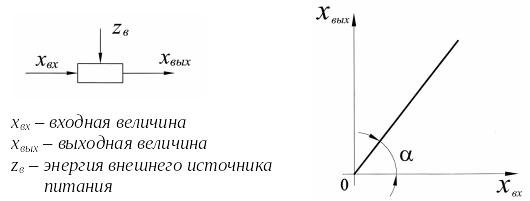
Реле – это элемент автоматики, в котором при плавном постепенном изм-ии входной величины при достижении её определенного значения происходит скачкообразное изменение выходной величины.
Статическая характеристика реле –зависимость вых параметра от входного.
предназначены для автоматического включения и переключения электрических цепей под действием входного сигнала небольшой мощности и используются для: -выявления предельных значений входной величины
- для изменения времени действия сигнала;
– для переключения сигнала по различным каналам;
– для одновременного управления несколькими объектами.



Классификация реле:
По входной величине:
-механические
-гидравлические
-пневматические
-электрические
По времени срабатывания:
-быстродействующие; -0,04с
-нормальнодействующие; 0,1-0,4с
-медленнодействующие 0,6 – 1,2 с
-реле выдержки времени >1,5 с
Контактные и безконтактные
Механические реле (схемы(скорости, температур, сильфон))
19 Электромагнитные реле. Нейтральные и поляризованные реле. Осн. Хара-ки и область применения
Электромагнитные – наиболее распространненные – нейтральные, поляризованные
-магнито-электр
-электродинамич
- индукционные
индукционные
-электронные
Нейтральные - не реагируют на полярность, сигнал зависит от полярности напр-я
Поляризованные – выходной сигнал зависит от полярнрости
Н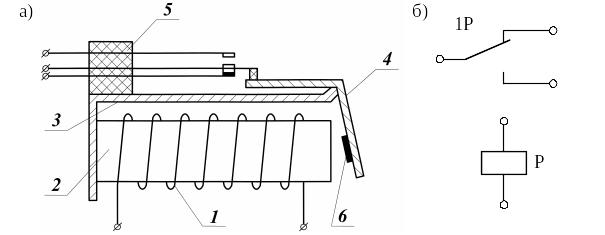 ейтральные
– входным параметром явл напряж
подаваемое на его обмотку. По обмотке
протекает ток вокруг обмотки появл
некое магнитное поле
ейтральные
– входным параметром явл напряж
подаваемое на его обмотку. По обмотке
протекает ток вокруг обмотки появл
некое магнитное поле
Сердечник 2, находящийся внутри этой катушки, вместе с ярмом 3 и подвижным якорем 4 образуют магнитную цепь (магнитопровод), по которой проходит созданный током магнитный поток. При этом якорь притягивается к сердечнику и, при своём движении, воздействует на контактную группу 5, производя замыкание верхних, нормально разомкнутых (фронтовых) контактов, и размыкание нижних, нормально замкнутых (тыловых) контактов. Выходной величиной рассмотренного реле необходимо считать ток, коммутируемый этими контактами в другой цепи, а величина этого тока зависит от того, что в этой цепи включено. нейтральным, т.к. его срабатывание не зависит от полярности подключенного к катушке напряжения и, следовательно, направления тока в ней. Для определения направления тока (полярности входного сигнала), проходящего по обмотке, применяют специальное поляризованное реле
П![]() ри
поступлении сигнала на обмотку такого
реле происходит сравнение магнитного
потока катушки, и магнитного потока
постоянного магнита. Где эти потоки
совпадают по направлению, якорь реле
перемещается в эту сторону и замыкается
соответствующая контактная группа.
поляризованные реле обладают высокой
чувствительностью, но недостаток малая
электрическая мощность. чаще всего,
сигналы с них используют для последующего
управления более мощными электромагнитными
реле или, вместо поляризованного реле,
применяют специальную схему включения
двух нейтральных электромагнитных
реле требуемой мощности с выпрямительными
диодами.
ри
поступлении сигнала на обмотку такого
реле происходит сравнение магнитного
потока катушки, и магнитного потока
постоянного магнита. Где эти потоки
совпадают по направлению, якорь реле
перемещается в эту сторону и замыкается
соответствующая контактная группа.
поляризованные реле обладают высокой
чувствительностью, но недостаток малая
электрическая мощность. чаще всего,
сигналы с них используют для последующего
управления более мощными электромагнитными
реле или, вместо поляризованного реле,
применяют специальную схему включения
двух нейтральных электромагнитных
реле требуемой мощности с выпрямительными
диодами.
Электромагнитные реле получили наиболее широкое применение в автоматических устройствах для самых различных целей, как в промышленности, так и в быту, благодаря своей универсальности использования. Они могут работать в качестве датчиков для контроля параметров электрических сетей, использоваться как усилители в различных коммутационных и распределительных аппаратах и быть исполнительными устройствами в системах сигнализации и защиты.
недостаткам инерционность, обусловленную временны́ми параметрами, и невысокую надёжность из-за наличия контактных групп и их преждевременного износа.