

40) Системы команд пересылки данных.
Количество команд может быть от 90 до 130. Базовый набор содержит 118 команд, в т.ч. 33 – для использования регистров общего назначения (РОН); 2 – для обращения к регистрам ввода-вывода; 1 – для обращения к флэш-памяти; 22 – для операций с битами; 34 – управление входами команд.
Типы команд:
Пересылка данных.
Арифметические операции
Логические операции.
Команды ветвления и передачи управления.
Операции с битами.
Команды управления системой.
Рассмотрим команды пересылки данных. Они предназначены для пересылки данных находящихся в адресном пространстве БД: РОН, вв-выв, ЗУ, и для обращения к стеку.
Команды пересылки данных между РОН: mov r16, r0. При этом содержание r0 переходит в r16, и r0 остаётся без изменения.
ldi r30, $10 – команда записи const в регистр. По этой команде записываем 16-ти-ричное число в 30й регистр
in r25, $15 – в соотв. регистр 25 записываем информацию с содержимого порта вв-выв с соотв. номером.
Обратные действия:
out $16 r25 – пересылка данных из 25го регистра на соотв. адрес порта вв-выв
push r16 – запись инф-ии 16 регистра в стек
pop r10 - запись в 10 регистр инф-ии из стека.
41) Сторожевой таймер.
Сторожевой таймер (контрольный таймер, англ. Watchdog timer) — аппаратно реализованная схема контроля за зависанием системы. Представляет собой таймер, который периодически сбрасывается контролируемой системой. Если сброса не произошло в течение некоторого интервала времени, происходит принудительная перезагрузка системы. В некоторых случаях сторожевой таймер может посылать системе сигнал на перезагрузку («мягкая» перезагрузка), в других же — перезагрузка происходит аппаратно (замыканием сигнального провода RST или подобного ему).
Физически сторожевой таймер может быть:
Самостоятельным устройством.
Компонентом устройства, например микросхемой на материнской плате.
Частью кристалла SoC.
Автоматизированные системы, не использующие оператора человека, хотя тоже подвержены ошибкам, зависаниям и другим сбоям (в т.ч. аппаратным), с использованием сторожевых таймеров увеличивают стабильность работы — нет необходимости ручного сброса. Поэтому наиболее частое использование их — встроенные системы различного назначения.
Область применения
1. Контроль работы аппаратно-программных комплексов на основе эвм.
2. Управление устройствами измерительной техники.
42) Система команд операций с битами.
LSL Rd Логический сдвиг влево
LSR Rd Логический сдвиг вправо
ROL Rd Вращение влево с переносом
ROR Rd Вращении вправо с переносом
ASR Rd Арифметический сдвиг вправо
SBI A,b Установить бит в регистре Ввода/Вывода
CBI A,b Сбросить бит в регистре Ввода/Вывода
BSET s Установить флаг
BCLR s Сбросить флаг
43) Блок прерываний.
Блок прерываний принимает запросы прерываний и организует переход к выполнению прерывающей программы. Запрос принимается либо от внешних источников либо от внутренних (т/с, компараторы). Входами внешних сигналов являются входы параллельные вх-вых, для которых эти функции являются альтернативными.
П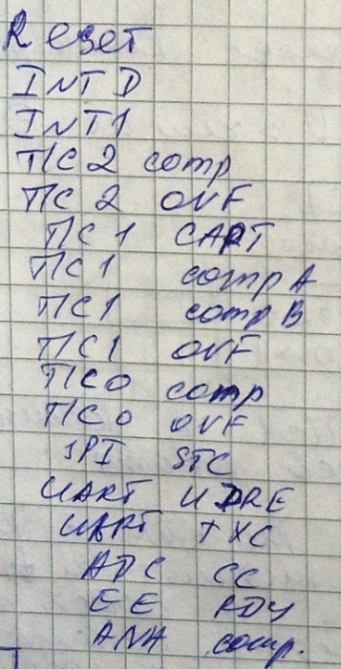 ереходы
могут быть по заднему фронту 1-0, по
переднему фронту 0-1, либо по любому
ходу.. Все запросы, поступающие в блок
прерываний имеют определённый приоритет.
ереходы
могут быть по заднему фронту 1-0, по
переднему фронту 0-1, либо по любому
ходу.. Все запросы, поступающие в блок
прерываний имеют определённый приоритет.