

3.11. Осесимметричное напряженное состояние
Одним из частных случаев объемного напряженного состояния, весьма часто встречающимся при обработке металлов давлением, является осесимметричное напряженное состояние.
Под этим видом напряженного состояния подразумевается напряженное состояние тела вращения, к поверхности или части поверхности которого приложены распределенные нагрузки, расположенные симметрично относительно его оси и одинаковые во всех меридиональных сечениях (рис. 3.11). Примерами могут служить осадка цилиндрической заготовки, ее прошивка, выдавливание (прессование), волочение и др.
При рассмотрении осесимметричного напряженного состояния весьма удобно пользоваться взамен декартовых цилиндрическими координатами, в которых положение любой точки А определяется радиусом-вектором р, полярным углом 0, отсчитываемым от ;>си р (х), и аппликатой г, как представлено на рис. 3.12, где а — проекция точки А на плоскость, перпендикулярную к оси г,
i
I
I
i
I.
![]()
![]()
 I
tit
I
I
tit
I
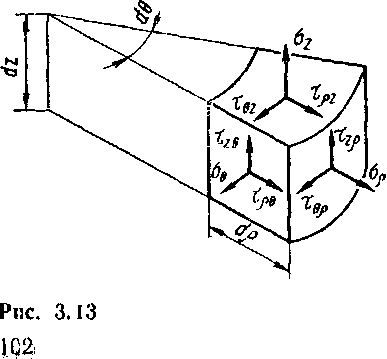
проходящую через точку О. Обозначения напряжений в цилиндрических координатах и форма элемента показаны на рис. 3.13. Тензор напряжений в цилиндрических координатах запишется так:
1рй
1бр
1гр 1гв °!
Напряжение ар называют радиальным, а0 — тангенциальным, а а2 — осевым.
При осесимметричном напряженном состоянии компоненты напряжений не зависят от координаты 9, и, следовательно, все производные по этой координате в дифференциальных уравнениях равновесия обратятся в нуль. Кроме того, в меридиональных плоскостях (плоскостях, проходящих через ось г, т. е. плоскостях 0) не могут возникнуть касательные напряжения вследствие симметричности тела и симметрии внешней нагрузки.
Поэтому с учетом закона парности касательных напряжений
тр9 = тге — тер ~ тег = 0. Следовательно, напряжение ав всегда будет главным, т. е. а0 = а2> a ось р может иметь любое направление в плоскости г (т. е. в плоскости, нормальной к оси г).
Таким образом, компоненты напряжений при осесимметричном напряженном состоянии можно записать так:
Рис.
3.14
ор
0
тр;
О Og О
тгр
О аг
рг
Всего
будет три нормальных и два равных между
собой касательных напряжения.
Применяя
тот же метод, который был использован
при рассмотрении объемного напряженного
состояния в декартовых координатах
(стр. 100), выведем дифференциальные
уравнения равновесия в цилиндрических
координатах для осесимметричного
напряженного состояния.
Действующие
напряжения показаны на рис. 3.14. Ось р,
как сказано ранее, можно провести в
любом направлении на плоскости г.
Для
удобства вычисления на рис. 3.14 эта ось
проведена так, что плоскость pz
является
плоскостью симметрии выделенного
элементарного объема.
Площади
элементарных площадок
Fp
=
пл. abed
—
pdQdz;
F(p+dp)
=
пл. a'b'c'd'
=
(р + dp)
dQ dz;
FQ
=
пл. a'd'bc
=
dpdz;
Fz
=
пл.
a'cdb'
=
пл. ас'd'b
=
p
dQdp.
Запишем
условия равновесия, проецируя все
действующие
на
элемент силы на оси риг,
принимая I
sin =![]()
арр аЪ dz + {о9 + dp) (р + dp) аЪ dz — ое dQ dp dz —
тргР dQ dp -f (тр2 + dz) p dQ dp = 0;
(a)
 -
x!PpdQdz
+
(тгр
+ igL
dp)
(p
+
-f
dp)dQdz—
o2pdQdp
-f
^аг
-j-
-
x!PpdQdz
+
(тгр
+ igL
dp)
(p
+
-f
dp)dQdz—
o2pdQdp
-f
^аг
-j-
dz
da.
0;
00
dz
да.
два
др
dz
= 0.
(3.39)
При решении некоторых осесимметричных задач в дальнейшем придется встретиться кроме цилиндрических координат со сферическими. В этой системе (рис. 3.15) положение точки определяется радиусом-вектором р и двумя углами 9 и ср, определяющими его положение в пространстве. Угол ф отсчитывается от оси г (аналогичен географической широте), а угол 9 отсчитывается от некоторой оси в плоскости, нормальной к оси z и проходящей через центр О системы (аналогичен географической долготе). Обозначения напряжений в сферических координатах получим, заменив индекс z в обозначениях, данных для цилиндрической системы, индексом ср.
При осесимметричном напряженном состоянии напряжения не зависят от координаты 9, а касательные напряжения, содержащие в индексе эту координату, т. е. тр9 = т0р и тф8 = т^, равны нулю.
Дифференциальные уравнения равновесия для осесимметрич-ного напряженного состояния в сферических координатах приведем без вывода:
дтрф
J
+
— [2ар
- (о„ + о„) + tw
ctg ф]
=
0;
др
~г
Р дх.
Р
<Эф

oe)ctgcp] = 0.
(3.39a)