Нахождение образа линейного оператора. 1.9
Образ линейного оператора есть подпространство. Его размерность (число векторов базиса) называется рангом оператора )совпадает с рангом матрицы).Нахождение образа:
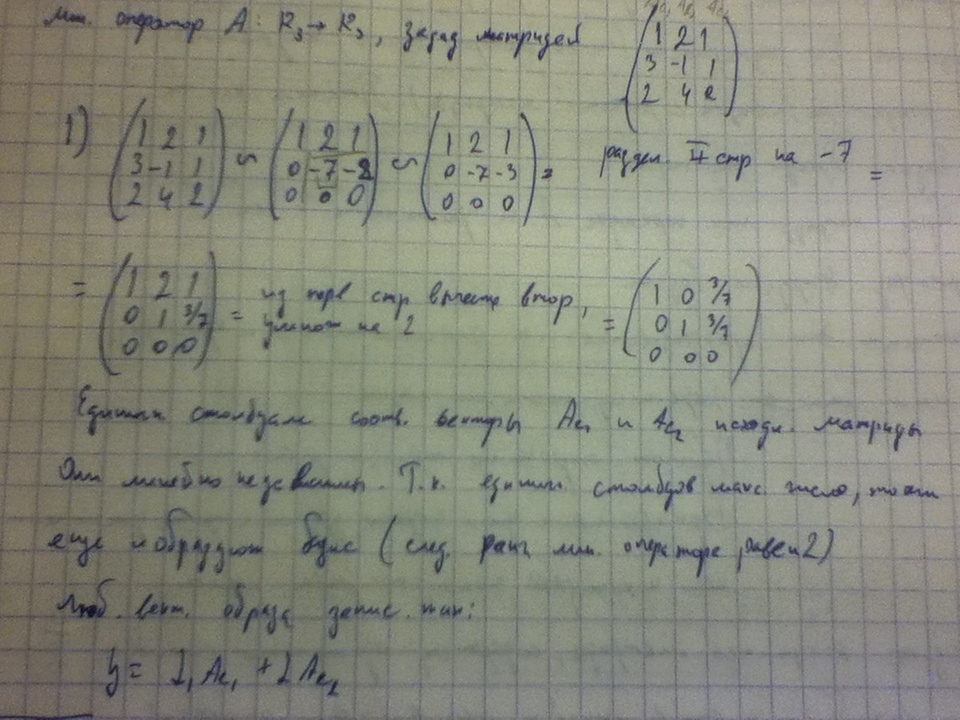
Образовать матрицу линейного оператора А и применить к ней преобразование Жордана-Гаусса.
Дополнить эти преобразования т.н. элементарными преобразованиями:
Перемещение местами строк
Умножение строки на число, не равное 0
Прибавление к строке другой строки, умноженной на некоторое число
В результате получим матрицу, содержащую единичные столбцы. Этим столбцам соостветвуют линейно независимые векторы образа. Если к тому же их максимальное количество, то эти линейно независимые векторы образуют базис образов
Найдя базис и пользуясь теоремой о базисе записать любой вектор образа.
Ядро линейного оператора, обозначение, способ нахождения. 1.10
Множество
векторов x
из Rn,
которое линейным оператором А переводится
в нелувой вектор пространства Rm
называется ядром линейного оператора.
Обозначается как KerA.
Ядро
линейного оператора есть линейное
подпространство, размерности n-r
и называется дефектом оператора.

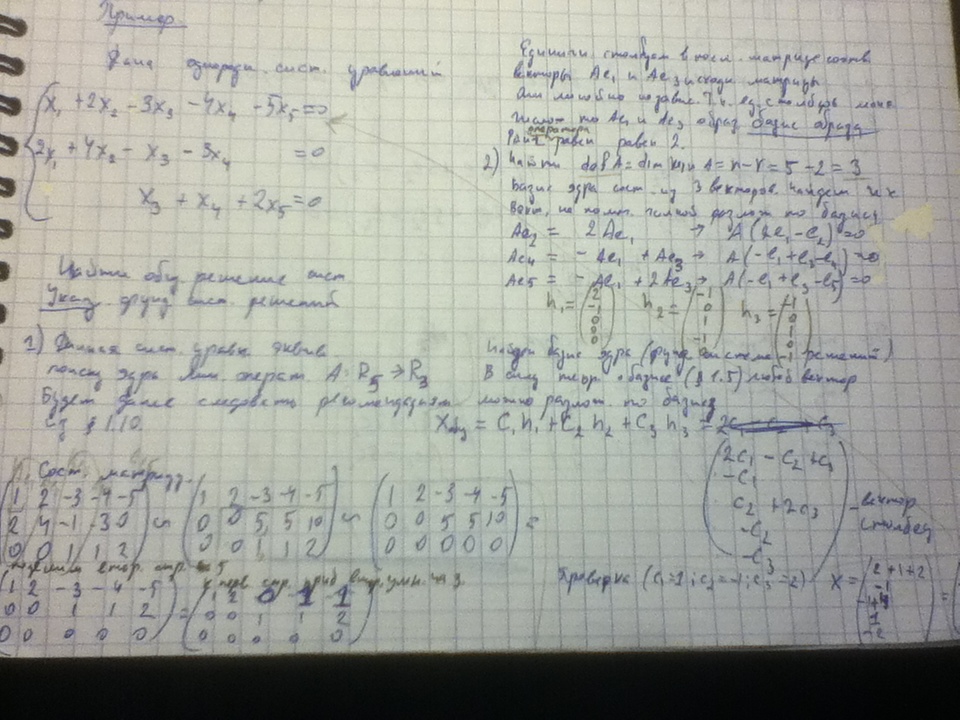
Решение однородных систем линейных уравнений в общем случае. 1.11

Пусть
А матрица системы, а вектор столбец {x1,
x2,
…, xn}=x,
тогда вспоминая операцию умножения
матриц, систему уравнений можно записать
в матричной форме Ах=0
На левую часть
выражения можно смотреть как на линейны
оператор A:Xn->Ym.
Но тогда соотношение означает, что нужно
найти ядро оператора А. По теореме
находим дефект оператора А и базис ядра,
который в данном случае будет называться
фундаментальной системой решений
системы. Следовательно любое решение
системы (то есть любой вектор ядра) имеет
вид

Переход к новому базису. Формулы (1) и (2). 1.12
Пусть в линейном пространстве R3 выбраны два базиса {e1,e2,e3} и {e’1,e’2,e’3}. Пусть вектор x={x1,x2,x3} в старом базисе и {x’1,x’2,x’3} в новом.
В силу теоремы о базисе векторы нового базиса можно выразить через векторы старого e’1=a11*e1+a12*e2+a13*e3 e’2=a21*e1+a22*e2+a23*e3 e’3=a31*e1+a32*e2+a33*e3
Образуем матрицу перехода от старого базиса к новому, по столбцам которого стоят координаты векторов нового базиса

Можно доказать, что имеет место следующее соотношение: Выражение старых координат через новые

Выражение новых координат через старые

Действия над линейными операторами. 1.13
Сумма операторов С=А+В (А+В)х=Ах+Вх При этом матрица С равна сумме матриц А и В
Произведение А на число α С= αА αА(х)=А(αх) Матрица оператора С равна произведению α на матрицу А
Произведение операторов А и В С=А*В АВ(х)=А(Вх) При этом матрица оператора С равна произведению матриц А и В.
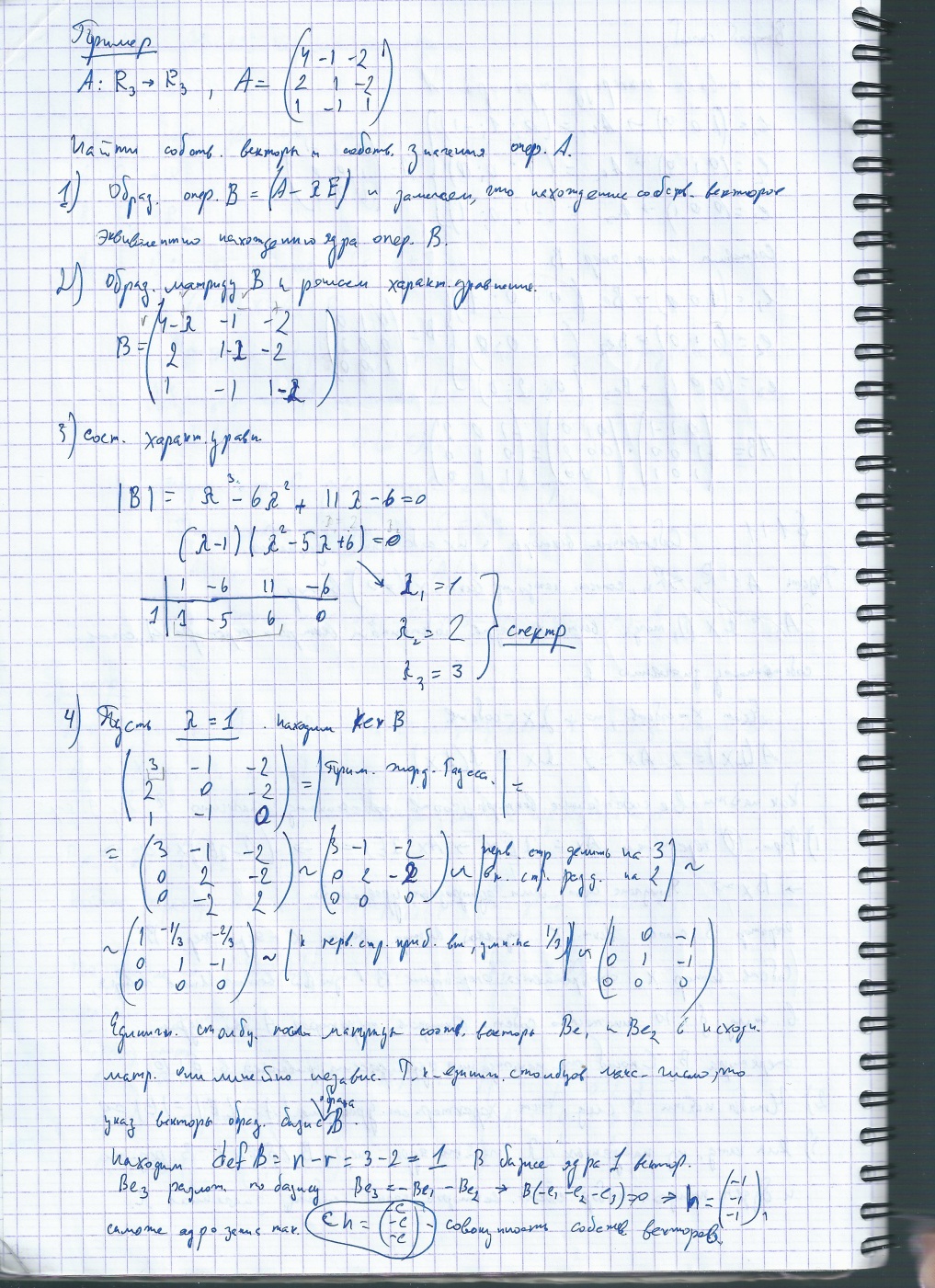
Собственные векторы и собственные значения. Характеристический многочлен. 1.14
Пусть A:Rn->Rn, сопоставляющий каждому вектору х не равному нулю вектора Ах = λх, тогда вектор х называется собственным вектором оператора А, соответствующий собственному значению λ. Если х-собственный, то и αх-собственный
А(αx)=αAx=αλx=λ(αx)
Найти все собственные векторы, соответствующие собственному значению λ:
Формулу Ах = λх перепишем как Ax=λEx -> Ax-λEx=0 -> (A-λE)x=0 ->Bx=0 Получена система линейных однородных уравнений. Оператор В сопоставляет вектору х нулевой вектор. Вектор х – ядро оператора В. Собственный вкетор х отображается оператором В в нулевой вектор. Иначе говоря, множество собственных векторов оператора А является ядром оператора В.
Чтобы найти λ следует составить характеристическое уравнение

Для каждого из найденных λ найти ядро оператора В. В результате и будет получен набор собственных векторов, соответствующих собственному значению λ