

3.4. Импульсные источники питания персональных компьютеров
Преобразователи с двухтактным инвертором доминируют в источниках питания персональных компьютеров. Появившись в первых IBM PC они дошли до наших дней с незначительными изменениями. Обобщенная структурная схема источника приведена на рис.3.21.

Рис. 3.21
Переменное напряжение сети через предохранитель F, фильтр радиопомех ФРП и нелинейный резистор R1 поступает на входной выпрямитель. Выпрямленное напряжение сглаживается емкостным фильтром С1, С2. Фильтр радиопомех обеспечивает электромагнитную совместимость источника питания с другим оборудованием, подключенным к сети. Нелинейный резистор с отрицательным температурным коэффициентом ограничивает пусковой ток заряда конденсаторов фильтра при включении источника в сеть. После пуска через резистор начинает протекать рабочий ток, температура резистора увеличивается а сопротивление уменьшается. Это позволяет уменьшить потери в резисторе.
Источник позволяет питать компьютер от сетей с напряжением 220 и 110 В. Для того в нем предусмотрен переключатель S изменяющий схему выпрямления. В разомкнутом состоянии, соответствующем питанию от сети 220 В, выпрямитель работает как мостовой, а конденсаторы С1, С2 включаются последовательно. Суммарное их напряжение приблизительно равно амплитуде напряжения сети. В замкнутом состоянии переключателя S диоды VD1 и VD4 не участвуют в выпрямлении, а диоды VD2 и VD3 образуют схему удвоения напряжения. Каждый из конденсаторов заражается до амплитудного значения сетевого напряжения, а сумма напряжений в два раза больше амплитудного. Таким образом, в этом состоянии можно получить тоже напряжение на входе инвертора при вдвое меньшем напряжении сети. В некоторых моделях источников изменение схемы выпрямления происходит автоматически. Роль ключа в них играет симистор управляемый специальной схемой измеряющей напряжение питающей сети.
Инвертор выполнен по полумостовой схеме. Первичная обмотка силового трансформатора Т2 включена в диагональ моста образованного транзисторами VT1, VT2 и конденсаторами С1, С2. Последовательно с ней включены конденсатор С3 и первичная обмотка измерительного трансформатора тока Т1. Конденсатор С3 исключает протекание постоянной составляющей тока по первичной обмотке Т2. Назначение трансформатора Т1 будет раскрыто позднее. Напряжение вторичной обмотки трансформатора Т2 (в реальных источниках их несколько) выпрямляется, сглаживается LC фильтром и подается на нагрузку.
Для поддержания выходного напряжения на заданном уровне на вход схемы управления (СУ) с делителя R2, R3 подается сигнал обратной связи по напряжению. Для защиты источника от перегрузок в по току со вторичной обмотки трансформатора тока Т1 подается сигнал пропорциональный току первичной обмотки силового трансформатора. Управление транзисторами инвертора осуществляет согласующий каскад (СК) через развязывающий трансформатор Т3.
Для пуска источника используется схема пуска (СП). Ее назначение состоит в заряде конденсатора Сп до напряжения включения. После пуска некоторое время СУ и СК работают, используя энергию Сп, а затем переходит на питание от вспомогательной обмотки силового трансформатора по принципу «самоподпитки».
Большую часть функций СУ в современных источниках выполняет специализированная микросхема двухтактного ШИМ−контрол-лера. Первой такую схему (TL494CN) разработала фирма TEXAS INSTRUMENT. Сейчас аналогичные схемы выпускают еще несколько фирм, в том числе и в России (КР1114ЕУ4).
Рассмотрим подробно устройство и работу этой схемы, используя ее структуру (рис. 3.22).
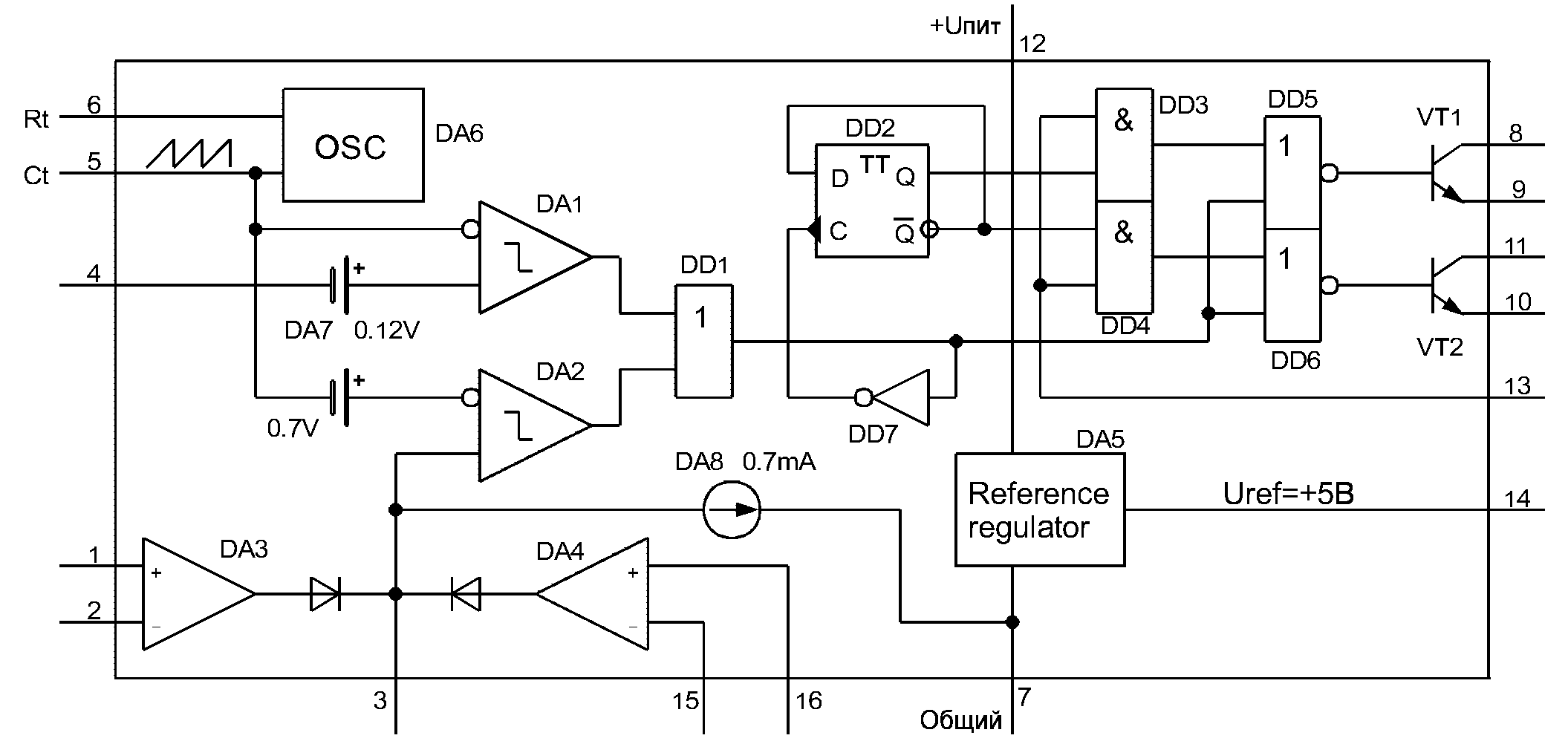
Рис. 3.22
Схема содержит в своем составе следующие узлы:
• генератор пилообразного напряжения (ГПН) DA6. Частота ГПН определяется номиналами резистора и конденсатора, подключенных к 5-му и 6-му выводам, и в рассматриваемом классе БП выбирается равной примерно 60 кГц;
• источник опорного стабилизированного напряжения DA5 (Uref=+5,0B) с внешним выходом (вывод 14);
• компаратор "мертвой зоны" DA1;
• компаратор ШИМ DA2;
• усилитель ошибки по напряжению DA3;
• усилитель ошибки по току DA4;
• два выходных транзистора VT1 и VT2 с открытыми коллекторами и эмиттерами;
• динамический двухтактный D-триггер DD2 работающий в режиме деления частоты на 2;
• вспомогательные логические элементы DD1 (2-ИЛИ), DD3 (2-И), DD4 (2-И), DD5 (2-ИЛИ-НЕ), DD6 (2-ИЛИ-НЕ), DD7 (НЕ);
• источник постоянного напряжения DA7 с номиналом 0,12 В;
• источник постоянного тока DA8 с номиналом 0,7мА.
На схеме не показан монитор питания, запрещающий работу контроллера, если напряжение на выводе 12 меньше 7 В.
Всю совокупность функциональных узлов, входящих в состав ИМС TL494, можно условно разбить на цифровую и аналоговую части. К аналоговой части относятся усилители ошибок DA3, DA4, компараторы DA1, DA2, генератор пилообразного напряжения DA6, а также вспомогательные источники DA5, DA7, DA8. Все остальные элементы, в том числе и выходные транзисторы, образуют цифровую часть.
Рассмотрим в начале работу цифрового тракта. Из схемы очевидно, что моменты появления выходных управляющих импульсов микросхемы, а также их длительность определяются состоянием выхода логического элемента DD1. Остальная "логика" выполняет лишь вспомогательную функцию разделения выходных импульсов DD1 на два канала. Триггер DD2 благодаря соединению инверсного выхода со входом D работает в режиме одноразрядного двоичного счетчика. Как известно в этом режиме счетчик является делителем частоты сигнала на входе С на два. Элементы DD5, DD6 распределяют импульсы на выходе DD1 на два канала. Благодаря элементам DD3, DD4 и входу 13 есть возможность блокировать работу выходных транзисторов контроллера. Если на вход 13 подать логический сигнал низкого уровня, то оба транзистора закроются, и не будут реагировать на работу аналоговой части контроллера.
Состояние выхода DD1 зависит от состояния выходов компараторов DA1, DA2. Временные диаграммы, поясняющие работу аналоговой части микросхемы, приведены на рис. 3.23. На них изображены совмещенные во времени сигналы на входах компараторов DA1, DA2, сигналы на их выходах, сигнал на выходе DD1 и напряжение на обмотках трансформатора Т2.
На инвертирующий вход DA1 подается сигнал с генератора пилообразного напряжения. На неинвертирующий вход подается постоянное напряжение равное сумме напряжений источника DA7 и напряжения, поданного на вывод 4. На выходе DA1 формируются импульсы постоянной длительности. На инвертирующий вход DA2 подается сумма пилообразного напряжения и постоянного напряжения 0,7 В. На неинвертирующий вход подается наибольшее из двух напряжений: с выхода DA3 или с выхода DA4. Выделение максимума производится двумя диодами присоединенных катодами ко входу DA2. Источник с напряжением 0,7 В компенсирует падение напряжения на диодах. На выходе DA2 формируется последовательность импульсов, длительность которых прямо пропорциональна напряжению на неинвертирующем входе. В системе регулирования это может быть

Рис. 3.23
либо сигнал ошибки регулирования выходного напряжения либо сигнал тока первичной обмотки Т2.
Выходной сигнал DD1 является логической суммой выходных сигналов DA1 и DA2. Логика отрицательной обратной связи в системе регулирования такова, что отпирание транзисторов VT1, VT2 происходит на интервалах с низким уровнем выхода DD1, то есть на этих интервалах формируются положительная и отрицательная полуволны напряжения обмоток Т2. Обратите внимание, что минимальная бестоковая пауза между полуволнами, называемая иногда «мертвой зоной» задается компаратором DA1. Наличие гарантированной паузы необходимо для надежной работы инвертора. При ее отсутствии может возникнуть ситуация, известная под названием «пробой стойки». Она объясняется инерционностью силовых транзисторов инвертора, которые не могут открываться и закрываться мгновенно. Поэтому, если одновременно на базу открытого до этого транзистора подать запирающий сигнал, а на базу закрытого транзистора - отпирающий (т.е. с нулевой «мертвой зоной»), то получится ситуация, когда один транзистор еще не закрылся, а другой уже открыт. Тогда и возникает пробой по транзисторной стойке полумоста, который заключается в протекании сквозного тока через оба транзистора. Этот ток, как видно из схемы рис. 3.21, минует первичную обмотку силового трансформатора и практически ничем не ограничен, поэтому достигает очень большой величины за очень короткий промежуток времени. Это приводит к резкому возрастанию выделяющейся на обоих силовых транзисторах мощности и практически мгновенному выходу их из строя (пробою). После пробоя транзисторов могут быть выведены из строя диоды входного выпрямителя. Процесс этот заканчивается перегоранием сетевого предохранителя, который из-за своей инерционности не успевает защитить элементы схемы, а лишь защищает от перегрузки первичную сеть. Поэтому управляющее напряжение; подаваемое на базы силовых транзисторов должно быть сформировано таким образом, чтобы сначала надежно закрывался бы один из этих транзисторов, а уже потом открывался бы другой. Другими словами, между управляющими импульсами, подаваемыми на базы силовых транзисторов обязательно должен быть временной сдвиг, не равный нулю. Минимальная допустимая длительность «мертвой зоны» определяется инерционностью применяемых в качестве силовых ключей транзисторов VT1,VT2.
Архитектура микросхемы позволяет регулировать величину минимальной длительности «мертвой зоны» с помощью потенциала на выводе 4 микросхемы. Этот потенциал может быть задан с помощью внешнего делителя, подключаемого к шине выходного напряжения внутреннего опорного источника микросхемы Uref. Регулировка «мертвой зоны» используется и для обеспечения благоприятного пускового режима источника. Для этого на вход 4 с помощью RC−цепи подается напряжение, которое в момент пуска равно амплитуде пилы, а затем медленно уменьшается до нуля. Длительность открытого состояния транзисторов при этом медленно нарастает. Такой режим обеспечивает «мягкий» запуск источника. В режиме «жесткого» пуска, с нулевым напряжением на выводе 4 и максимальной длительностью открытого состояния транзисторов, в первичной обмотке Т2 и в транзисторах инвертора будет протекать большой ток, обусловленный зарядом разряженного конденсатора фильтра Сф.
Рассмотрим параметры источников питания IBM−совместимых компьютеров. Первоначально ИП формировали 4 номинала напряжения питания, требовавшихся для работы ХТ−компьютеров: +5 В, -5 В, +12 В, -12 В. Современные компьютеры требуют +3,3 В, +5 В и +12 В, но с целью обеспечения совместимости некоторые модели БП продолжают выдавать и отрицательные номиналы. Как правило, цифровые электронные компоненты и интегральные схемы компьютера (системные платы, платы расширения, логические схемы дисководов) используют напряжения +3,3 и +5 В, в то время как двигатели (дисководов и вентиляторов) обычно работают с напряжением +12 В. Устройства, рабочее напряжение которых отличается от подаваемого, должны питаться от встроенных стабилизаторов напряжения. Например, рабочие напряжения 2,5 В для модулей памяти RIMM/DDR DIMM и 1,5 В для AGP 4x и более быстрых адаптеров обеспечиваются простыми встроенными понижающими стабилизаторами. Процессоры подключаются к собственному модулю стабилизатора напряжения, который встраивается в системную плату. Современная системная плата содержит три (или больше) модуля стабилизатора напряжения.
Напряжение -5 В системной платой не используется, оно сохраняется лишь как часть стандарта шины ISA и поступает на контакт B5 шины. Напряжение -12 В также не используется, за исключением последовательного порта и микросхем поддержки локальной сети в некоторых системных платах, и для этого подводится к контакту B7 шины ISA.
Напряжение +12 В предназначено в основном для питания двигателей дисковых накопителей. Источник питания по этой цепи должен обеспечивать большой выходной ток, особенно в компьютерах с множеством отсеков для дисководов. Напряжение +12 В подается также на вентиляторы, которые, как правило, работают постоянно. Обычно двигатель вентилятора
потребляет от 100 до 250 мА, но в новых компьютерах это значение ниже 100 мА. В большинстве компьютеров вентиляторы работают от источника +12 В, но в портативных моделях для них используется напряжение +5 В (или даже +3,3 В).
Блок питания не только вырабатывает необходимые для работы узлов компьютера номиналы питающего напряжения, но и приостанавливает функционирование системы до тех пор, пока величина этого напряжения не достигнет значения, достаточного для нормальной работы. Иными словами, блок питания не позволит компьютеру работать при нештатном уровне напряжения питания.
В каждом блоке питания перед получением разрешения на запуск системы выполняется внутренняя проверка и тестирование выходного напряжения. После этого на системную плату посылается специальный сигнал Power_Good (питание в норме). Если такой сигнал не поступил, компьютер работать не будет.
Уровень напряжения сигнала Power_Good — около +5 В (нормальной считается величина от +3 до +6 В). Он вырабатывается блоком питания после выполнения внутренних проверок и выхода на номинальный режим и обычно появляется через 0,1–0,5 с после включения компьютера. Сигнал подается на системную плату, где микросхемой тактового генератора формируется сигнал начальной установки процессора. При отсутствии сигнала Power_Good микросхема тактового генератора постоянно подает на процессор сигнал сброса, не позволяя компьютеру работать.
Если выходные напряжения блока питания перестают соответствовать номинальным в процессе работы (например, при снижении напряжения в сети), сигнал Power_Good отключается и процессор автоматически перезапускается. При восстановлении выходных напряжений снова формируется сигнал Power_Good и компьютер начинает работать так, будто его только что включили. Благодаря быстрому отключению сигнала Power_Good компьютер “не замечает” неполадок в системе питания, поскольку останавливает работу раньше, чем могут появиться ошибки четности и другие проблемы, связанные с неустойчивостью напряжения питания.
Большинство систем с современными формфакторами системных плат (ATX, micro_ATX и NLX) поддерживают специальный сигнал управления питанием. Эта функция, получившая название PS_ON, может применяться для выключения блока питания (и, следовательно, компьютера) с помощью программного обеспечения. Сигнал PS_ON нашел применение в операционной системе Windows, где он определяется в спецификациях APM (Advanced Power Management — усовершенствованное управление питанием) и ACPI (Advanced Configuration and Power Interface — усовершенствованный интерфейс конфигурирования системы и управления энергопитанием).
При выборе команды Shut Down (Выключение) в меню Start (Пуск) Windows автоматически отключает систему по завершении программной последовательности отключения. В компьютере, не поддерживающем функцию PS_ON, на экран будет выведено сообщение о том, что его можно отключить вручную.