

2.2. Электромеханические свойства коллекторных двигателей последовательного и смешанного возбуждения
Коллекторные двигатели последовательного возбуждения чаще применяются в неуправляемых электроприводах. Их достоинством является возможность одновременного обеспечения большого пускового момента и высокой скорости холостого хода, что способствует их применению в качестве тяговых двигателей на транспорте или исполнительных двигателей механизмов с широким диапазоном скоростей. В последнее время такие двигатели находят применение в бытовой технике. Например, в приводе барабана стиральной машины, где эти двигатели используются и как управляемые.
2.2.1. Электромеханические характеристики
Схема замещения двигателя в первом приближении может быть представлена в виде рис. 2.12, где, кроме обозначений, принятых в предыдущем параграфе, обозначено Rвт, Lвт – активное сопротивление и индуктивность короткозамкнутого контура вихревых токов.
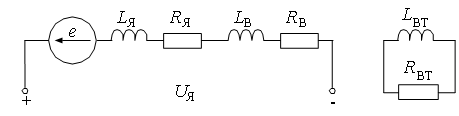
Рис. 2.12. Схема замещения двигателя постоянного тока последовательного возбуждения
Из теории электрических машин известно, что вихревые токи образуются в полюсах и в магнитопроводе двигателя при быстром изменении потока. В двигателях большой мощности влияние короткозамкнутого контура на динамические свойства может оказаться существенным. Однако для рассматриваемого класса приводов с мощностью до нескольких киловатт этим влиянием можно пренебречь. Тогда, в соответствии со схемой замещения и с учетом выражения (2.3), уравнение напряжения якорной цепи получит вид
(2.57)
Uя=KΦω+iяRяс+Lяс×diяс/dt+wв×dΦ/dt,
где Rяс=Rя+Rв, Lяс=Lя+Lв, wв – число витков обмотки возбуждения.
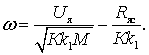
В отличие от двигателей независимого возбуждения здесь магнитный поток является функцией тока якоря. Как мы отмечали, эта зависимость нелинейная, поэтому нелинейная и механическая характеристика, которую для реальной зависимости потока от тока (см. рис. 2.8.а) вообще трудно выразить аналитически. Для того, чтобы представить электромеханические характеристики в аналитической форме, заменим, как мы делали в предыдущем параграфе, реальную зависимость потока от тока аппроксимированной, вида (см. рис. 2.8.б). Тогда в установившемся режиме при iя≤Iнс, где Iнс – ток двигателя, при котором наступает насыщение магнитной системы, из уравнения (2.57) с учетом (2.6) и (2.43.а) получим уравнения электромеханической:
(2.58)
ω=Uя/(Kk1Iя)−Rяс/(Kk1)
и механической характеристик:
(2.59)
Здесь k1 – коэффициент, связывающий поток двигателя с током якоря (Φ=k1Iя).
При iя>Iнс из-за насыщения системы согласно (2.43.б) поток условно можно принять постоянным, как и в двигателе независимого возбуждения, поэтому для описания характеристик с определенной степенью приближения справедливы выражения (2.5) и (2.7). Электромеханические характеристики двигателя имеют вид (рис. 2.13).
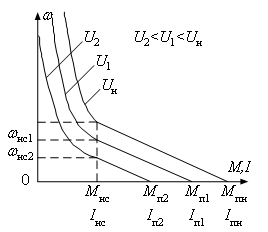
Рис. 2.13. Механические характеристики двигателя последовательного возбуждения
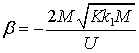
Согласно рис. 2.13 жесткость механической характеристики двигателя последовательного возбуждения – переменная. Для ее оценки при M<Mнс, где Mнс – момент при котором наступает насыщение магнитной системы, воспользуемся выражением (2.59). Откуда, согласно определению жесткости, получим
(2.60)
 .
.
При M≥Mнс жесткость приближенно определяется выражением (2.11), где поток необходимо принять равным потоку насыщения магнитной системы.
Изложенная методика представления статических характеристик является довольно грубым приближением и удобна тем, что просто дает качественное представление о них. Для точного расчета необходимо использовать универсальные характеристики, приведенные в каталогах.