

Оптимальные множительные структуры
Из всех возможных вариантов оптимальной будет та структура, которая обеспечивает простоту, т.е. имеет наименьшее количество групп и передач, наименьшие размеры и массу, т.е. удовлетворяет критериям оптимальности.
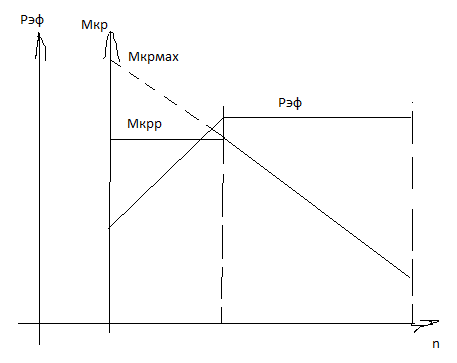
Силовая характеристика пгд. Определение мощности электродвигателя пгд.
Номинальная мощность ЭД ПГД (Pгл, кВт)принимают с учетом эффективной мощности застрачиваемой на резание на шпинделе станка, а так же с учетом потери мощности механической части привода
Pгл=Pэф+Pт, где Pт - потери мощности на трение, кВт
Pт =Pхх + Pдоп
Pхх – постоянные потери мощности холостого хода независящие от нагрузки (обусловлены трением в опорах, передачах, перемешиванием масла, т.е. Pхх = f(n)
Pдоп – дополнительные потери (переменные связанные с ростом сопротивления при увеличении нагрузки)
![]()
![]()
Для
ПГД на стадии предварительный расчетов
принимают ![]() не является постоянной величиной и
зависит от ряда факторов: нагрузки,
качества сборки, совершенства системы
смазывания и др.
не является постоянной величиной и
зависит от ряда факторов: нагрузки,
качества сборки, совершенства системы
смазывания и др.
Эффективная
мощность резания определяется ![]() ,
кВт
,
кВт
![]() – тангенциальная составляющая для силы
резания, Н
– тангенциальная составляющая для силы
резания, Н
![]() – скорость резания для тех же условий
обработки, м/мин
– скорость резания для тех же условий
обработки, м/мин
Мощность
ЭД ПГД выбирают ![]()
![]()
Так как ПГД станков общего назначения режим нагрузки изменяется и носит повторный кратковременный характер
Для ПГД станков общего назначения желательно иметь постоянство передаваемой мощности по всему диапазону регулирования.
Пгд с бесступенчатым (электромеханическим) регулированием скорости
Для обеспечения силовой характеристики ПГД современных станков ЧПУ применяют:
Широко регулируемые ЭД постоянного тока серий 2П(Ф), 4П(Ф)
Асинхронные ЭД с частотным токовым регулированием скорости серии 4АБ, АДЧР
Для
асинхронных ЭД частота вращения вала
определяется по ![]()
f – частота =50;
S – скольжение, отставание ротора. В номинальном режиме =2…6%
![]() ;
;
p – число пар полюсов
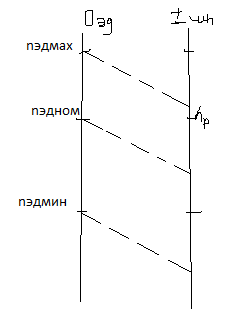
Регулирование
частоты вращения вала ЭД постоянного
тока, определяется по ![]() ,
происходит в двух областях:
,
происходит в двух областях:
В области с постоянным крутящем моменте (от nэдmin до nэдном) за счет увеличения напряжения цепи якоря. Диапазон регулирования ЭД при постоянном моменте
…( от nэдном до nэдмах)

Особенности пгд с бесступенчатым регулированием
Применительно к ЭД постоянного тока.
Общий
диапазон регулирования на ЭД получается
произведением этих двух диапазонов. На
шпинделе должны быть обеспечены
аналогичные диапазоны, т.е. общий диапазон
на шпинделе ![]()
Рассмотрим построение логарифмического графика ЧВШ для структуры ПГД ЭД-шпиндель
При соединении ЭД со шпинделем напрямую будут иметь диапазоны такие же, как на электродвигателе. Расчетное ЧВШ получается намного больше рекомендуемой ЭНИМС. Ее можно получить, соединив вал электродвигателя со шпинделем с помощью ременной передачи с понижающим передаточным отношением. При этом соотношения диапазонов остается без изменений.
Рассмотрим второй график. Электродвигатель – трехступенчатая АПК – шпиндель.
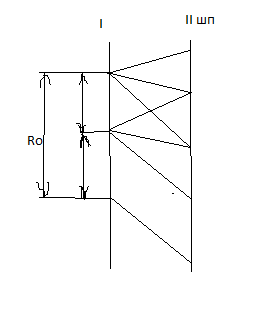
Из
графика видно что большой диапазон
регулирования электродвигателя при
постоянном токе полностью обеспечивает
регулирование на шпинделе в диапазоне
Rм, удовлетворяющего
требования черновой обработки. При это
диапазон регулирования ЭД как правило
ограничен и не позволяет полностью
обеспечить регулирование на шпинделе
в диапазоне R(p).
Для обеспечения оставшейся части
диапазона на шпинделе (от n’
до n max)
необходимо ввести дополнительно
небольшую (2х – 4х ступенчатую)
автоматическую передаточную коробку
(АПК). В зависимости от числа ступеней
АПК в заданный диапазон Rp
получают сочетание 2х,3х, реже 4х от
диапазонов, каждый из которых равен
=R(эp) Число
ступеней дополнительной АПК определяют
![]()
Если округление Zапк происходит в меньшую сторону это приводит к небольшому разрыву средней части диапазона Rp. В интервале разрыва ЧВШ изменяется при постоянном моменте. Это упрощает конструкцию АПК, но разрыв не должен превышать 10-15% от n АПК. В случае округление Z АПК в большую сторону получим перекрытие диапазонов, но при этом усложняется конструкция АПК.