

2) Экспериментальный способ настройки
Используется при затруднительно определимых передаточных функций объекта.
В процессе настройки в регуляторе отк-ют интегральную и дифференциальную
составляющую, а коэффициент передачи пропорциональной части изменяют до получения на выходе системы одного из типовых режимов, например, незатухающих колебаний, затухающих с заданной интенсивностью.
Затем, анализируя параметры колебаний на выходе получают настроечные параметры. Например: В ПИД регуляторе коэффициент передачи пропорц. части увеличили до появления на выходе незатухающих колебаний с периодом Ткр. В этом случае настроечные параметры:
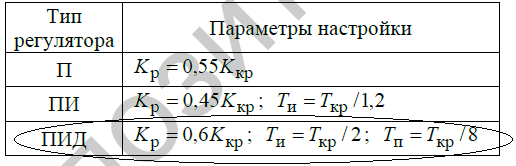
Эта методика используется для получения переходного процесса с Ϭ=20%.
39. Коррекция сар. Корректирующие устройства.
Процесс коррекции заключается в подборе корректирующих звеньев, которые позволяют одновременно повышать точность, быстродействие и запасы устойчивости системы. По способу включения различают:
1) Последовательные;
2) встречно-параллельные корректирующие звенья.
Параметры корректирующих звеньев определяют следующим образом:
1) в соответствии с техническим заданием строят ЛАЧХ желаемой системы и записывают ее передаточную функцию.
2) путем сравнения желаемой и исходной ЛАЧХ определяют параметры корректирующих звеньев.
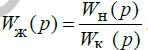
Если используется последовательные корректирующие звенья:
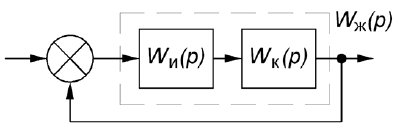
Wk(p)=WЖ(P)/W(p); lgWk(p)=lgWЖ(p)–lgW(p)
То есть для получения ЛАЧХ корректирующего звена из желаемой ЛАЧХ вычитают исходную
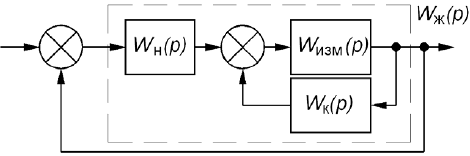
При использовании встречно-параллельных корректирующих звеньев местной обратной связью охватывают не всю систему, а только рассматриваемую ее часть.
![]()

![]()

![]()
40. Построение желаемой лачх.
Характеристика условно разбивается на 3 участка, которые строятся по отдельности, а затем соединяются. Первый участок называется низкочастотным.
1)Низкочастотная часть графика связана с параметрами точности. Для ее построения задается допустимая погрешность δ и параметры изменения входной величины, то есть ωmax и εmax (скорость и ускорение) и рассчитывают координаты контрольной точки.
1) низкочастотная часть 2)Среднечастотная часть
Если проектируется статическая система (обычно это система стабилизации) низкочастотная часть графика параллельна оси частот и расположена на уровне 20lgk, где k определяется из формулы: δ=q0/(1+k).
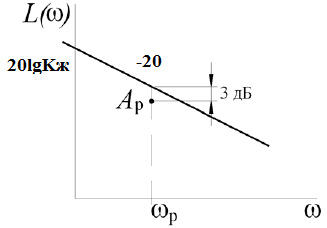
Следящая система обычно проектируется с астатизмом 1-го порядка. Для построения НЧ участка находят координаты контрольной точки: Аk (ωk; Lk)
ωk=εmax/ωmax – контрольная частота.
Lk=20lg(q0/δ)
Если номинальное воздействие не задано, то его лучше принять таким: q0=ωmax/ωk
Низкочастотный участок проходит на 3 дБ выше контрольной точки.
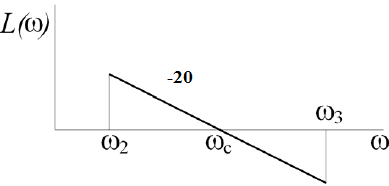
2)Среднечастотная часть строится по показателям быстродействия и запаса устойчивости: время переходного процесса tПП, ΔL, Δφ, σ. Для того, чтобы система была устойчивой, среднечастотная область должна проходить через частоту среза с наклоном –20дБ/дек. Частота среза определяется по формуле: ωср=bπ/tПП, где b – коэффициент, который зависит от величины перерегулирования. Определяется по специальной номограмме Солодовникова:
Границы среднечастотного участка определяются запасами устойчивости системы: ω2=(0,5π–Δφ)ωср/2; ω3=(8…10)ω2=(М+1)ωср/М.
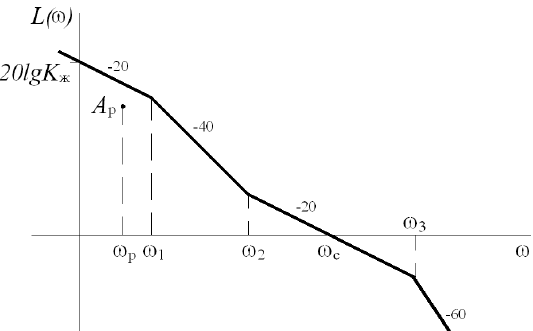
3)Высокочастотная часть характеризует усиление высокочастотных составляющих сигнала. При построении желаемой ЛАЧХ высокочастотную часть изображают с наклоном, равным наклону высокочастотной части исходной ЛАЧХ (–60; –80дБ/дек).
Низкочастотная и среднечастотная части соединяются участком с наклоном –40 или более дБ/дек.
Желаемая ЛАЧХ:
Чтобы изменить характеристику исходной системы до желаемого вида коррекцию выполняют в следующем порядке:
1) изменяют коэффициент передачи исходной системы до желаемой величины, то есть до совпадения низкочастотных участков ЛАЧХ;
2) с помощью местных обратных связей изменяют частоты излома исходной ЛАЧХ до получения следующих вариантов положения графиков:
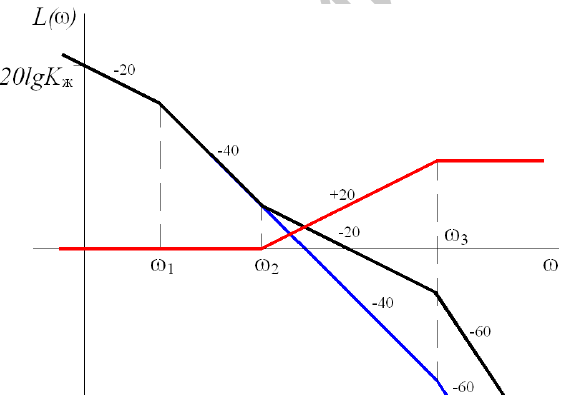
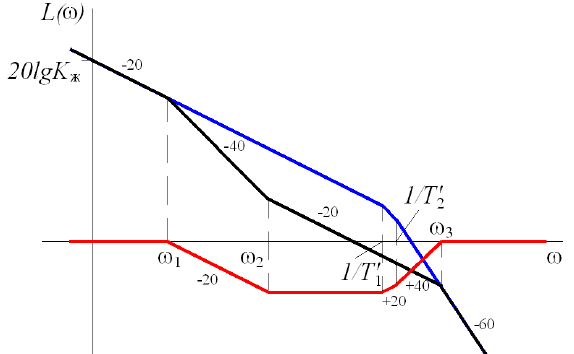
3) различия между графиками устраняют с помощью последовательной коррекции. Характеристика корректирующего устройства графически определяются вычитанием исходной ЛАЧХ из желаемой.