

1. Общие сведения об автоматическом управлении и регулировании. Основные понятия и определения.
Управление - комплекс мер направленных на обеспечение правильного функционирования объекта или процесса.
Регулирование – процесс, при котором управление заключается в изменении по заданному алгоритму каких-либо выходных параметров объекта.
Автоматика – это область науки и техники об общих принципах построения и методах анализа и синтеза автоматических систем.
Объект управления (рис) – техническое устройство или процесс, состояние которого в любой момент времени можно охарактеризовать набором качественных и количественных параметров.

Система автоматического управления (САУ) – комплекс технических средств, обеспечивающих автоматическое изменение состояния объекта по заданному алгоритму.
Структура САУ( САР):
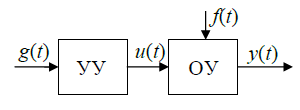
УУ-устройство управления в САУ,
УУ-регулятор в САР(U(t)-управляющее воздействие)
y(t) – выходная (регулируемая) величина;
f(t) – возмущающее воздействие
g(t) – задающее воздействие, которое формируется элементами регулятора или внешними причинами.
Основная задача любой САР – поддержание равенства y(t)=g(t). Это равенство является устойчивым (величины могут иметь разную физическую природу).
Параметры объекта и регулятора, а также возмущающее воздействие являются функциями времени, поэтому можно рассмотреть 2 режима работы системы:
статический;
динамический.
В статическом режиме перечисленные параметры постоянны или скорость их изменения настолько мала, что можно не учитывать инерцию элементов.
2. Фундаментальные принципы построения сау.
1) Принцип разомкнутого управления (управление по входному воздействию).
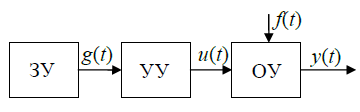
Управляющее воздействие формируется только на основе задающего воздействия без учета внешних возмущений. Функциональная схема системы:
ЗУ – задающее устройство, предназначено для формирования сигнала задающего воздействия.
УУ – устройство управления, которое на основе задающего воздействия формирует управляющее воздействие u(t).
Основное достоинство: простота конструкции.
y(t)=f(g(t)); y(t)=f1(u(t), f(t)); u(t)=f2(g(t))
Основной недостаток системы: низкая точность, связанная с тем, что влияние возмущающих воздействий на выходную величину не контролируется.
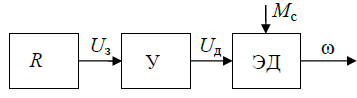
Область использования: работа при стабилизированных внешних воздействиях. Например, лабораторные измерительные приборы, системы охранной и пожарной сигнализации, система стабилизации скорости вращения двигателя постоянного тока.
Зарисуем последний пример:

2) Принцип компенсации.
Из числа возмущающих воздействий выбирается одно или несколько доминирующих, их изменения измеряются и результаты измерения используются в качестве дополнительных воздействий на объект.
 К
– компенсатор.
К
– компенсатор.
Основная область использования: системы с термокомпенсацией (Система автоматической компенсации длины маятника).
Достоинство: точность выше по сравнению с разомкнутым управлением.
Недостаток: при большом количестве возмущающих воздействий система становится сложной в настройке и обслуживании.
3) Принцип управления по отклонению (принцип обратной связи).Принцип Ползунова-Уатта.
В таких системах путем преобразования регулируемой величины формируют сигнал обратной связи, который сравнивают с сигналом задающего воздействия. Если в результате сравнения обнаруживается отклонение этих величин (ошибка рассогласования), регулятор работает на устранение этой ошибки.

ЧЭ – чувствительный элемент для преобразования регулируемой величины в форму, удобную для сравнения с задающим воздействием.
СУ – сравнивающее устройство, предназначено для получения ошибки рассогласования:
x(t)=g(t)-yx(t)
Помимо операции сравнения сравнивающее устройство может изменять масштаб или природу ошибки рассогласования. В этом случае: x(t)=Ксу(g(t)-yx(t))
Системы с обратной связью имеют наибольшую точность регулирования, поэтому по такому принципу строится большинство систем.
САР частоты вращения двигателя постоянного тока (пример):

!!!Чем выше скорость, тем выше сигнал обратной связи
ТГ – тахогенератор(преобразовывает скорость вращения в напряжение).
ΔU=UЗ-UТГ
ТГ-это ЧЭ, Итт-сигнал обратной связи
Достоинства: высокая точность;
Недостатки: введение обратной связи в систему замедляет ее работу и ухудшает динамические свойства.
Типовая функциональная схема сар.
Большая часть САР строится по принципу обратной связи.
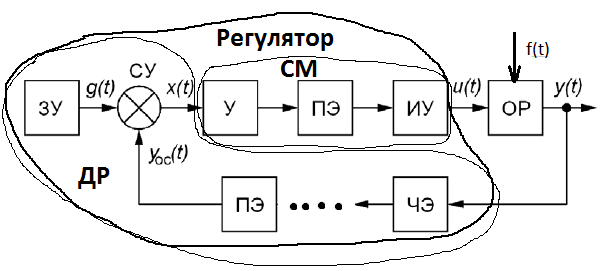
ДР – датчик регулятора
ЗУ – задающее устройство;
СМ – сервомеханизм;
СУ – основное сравнивающее устройство (для получения сигнала ошибки рассогласования).
ПЭ – преобразовательные элементы (для преобразования уровня или физической природы сигналов в различных точках системы). Могут находится в любом месте схемы в любом количестве.
У – усилитель (для усиления ошибки рассогласования с целью повышения чувствительности системы).
ОР - объект регулирования;
ИУ – исполнительно устройство (для формирования управляющего воздействия u(t) и находящееся непосредственно перед объектом.
Система состоит из ОР и регулятора, в состав которого входят датчик, который предназначен для формирования ошибки ДР на основе которой сервомеханизм формирует управляющее воздействие.
Для системы в целом и ее составляющих входными и выходными сигналами будут являться следующие параметры:
|
Вх |
Вых |
САР |
g(t); f(t) |
y(t) |
ОР |
u(t);f(t) |
y(t) |
Р |
g(t) |
u(t) |
ДР |
y(t);g(t) |
x(t) |
СМ |
x(t) |
u(t) |