

3.3 Кинетическая энергия при поступательном и вращательном движениях
Кинетической
энергией
тела называется функция механического
состояния, зависящая от массы тела и
скорости его движения (энергия
механического движения).Кинетическая
энергия поступательного движения
![]() . Кинетическая энергия вращательного
движения
. Кинетическая энергия вращательного
движения
![]() .
.
При сложном движении твёрдого тела его кинетическая энергия может быть представлена через энергию поступательного и вращательного движения:
![]() .
.
Свойства кинетической энергии.
1. Кинетическая энергия является конечной, однозначной, непрерывной функцией механического состояния системы.
2. Кинетическая энергия не отрицательна: ЕК 0.
3. Кинетическая энергия системы тел равна сумме кинетических энергий тел, составляющих систему.
4. Приращение
кинетической энергии тела равно работе
всех сил, действующих на тело:
![]() .
.
Гироско́п (от кругсмотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
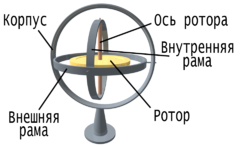
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА', BB' и CC', пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп.
Принцип работы
При
повороте гироскопа возникает Кориолисово
ускорение равное ![]() ,
где
,
где ![]() —
скорость и
—
скорость и ![]() —
угловая частота поворота гироскопа.
Горизонтальная скорость колеблющегося
грузика получается как :
—
угловая частота поворота гироскопа.
Горизонтальная скорость колеблющегося
грузика получается как : ![]() ,
а положение грузика в плоскости —
,
а положение грузика в плоскости — ![]() .
Внеплоскостное движение
.
Внеплоскостное движение ![]() ,
вызываемое поворотом гироскопа равно:
,
вызываемое поворотом гироскопа равно:
![]() где:
где:
![]() —
масса колеблющегося
грузика.
—
масса колеблющегося
грузика.![]() —
коэффициент жёсткости пружины в
направлении, перпендикулярном
плоскости.
—
коэффициент жёсткости пружины в
направлении, перпендикулярном
плоскости.![]() —
величина поворота в плоскости
перпендикулярно движению колеблющегося
грузика .Разновидности
—
величина поворота в плоскости
перпендикулярно движению колеблющегося
грузика .Разновидности
Пьезоэлектрические гироскопы.
Твердотельные волновые гироскопы.
Камертонные гироскопы.Вибрационные роторные гироскопы(в том числе динамически настраиваемые гироскопы)
Фундаментальные взаимодействия в природе
силовые поля, силы: тяготения, упр,трения
гравитационное(всемирное тягот), все частицы взаимодействуют, радиус любой, интенсивность 1
слабое, все кроме фотона, радиус 10-17м, интенс 1032
электро-магнтное, заряж частицы, радиус любой, инт10 36
сильное(ядерное), частицы адроны, 10 -15м, инт 10 38
грависилы:
принцип суперпозиции
центральные (между ц. по прямой)
силовые поля
векторные поле в пространстве, в каждой точке которых на пробную частицу действует определённая по величине и направлению сила (вектор силы).
стационарные поля, величина и направление которых могут зависеть исключительно от точки пространства (координат x, у, z), и
нестационарные силовые поля, зависящие также от момента времени t.
однородное силовое поле, для которого сила, действующая на пробную частицу, одинакова во всех точках пространства и
неоднородное силовое поле, не обладающее таким свойством.
Наиболее простым для исследования является стационарное однородное силовое поле, но оно же представляет собой и наименее общий случай.
виды сил
Сила упругости — сила упругого сопротивления тела внешней нагрузке. Направлена против внешней силы.
Сила трения — сила сопротивления относительному перемещению контактирующих поверхностей тел. Зависит от шероховатости и электромагнитной природы материалов контактирующих поверхностей. Вектор силы трения направлен противоположно вектору относительной скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия…
Сила нормальной реакции опоры — упругая сила, действующая со стороны опоры и противодействующая внешней нагрузке.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к поверхности раздела фаз. Осмотическое давление
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Ван-дер-Ваальсовы силы быстро убывают с увеличением расстояния.
В 1687 г. английский ученый Исаак Ньютон установил один из фундаментальных законов механики, получивший название закона всемирного тяготения: любые две материальные частицы притягиваются друг к другу с силой, пропорциональной произведению их масс и обратно пропорциональной квадрату расстояния между ними.
Силы тяготения (гравитационные силы) - это силы притяжения, которые подчиняются закону всемирного тяготения.
Сила тяжести - сила, с которой тело притягивается Землей.
Гравитационная сила образует силовое поле. Гравитационное поле называется неоднородным и центральным.
Гравитационная постоянная, коэффициент пропорциональности G в формуле, выражающей закон тяготения Ньютона F = G mM / r*r , где F — сила притяжения, М и m — массы притягивающихся тел, r — расстояние между телами.
Полная формулировка законов движения космических тел в центральном поле тяготения и определение понятий, связанных с описанием движения космических тел и характеристиками орбит:
|
Рис. 63. Элементы орбит |
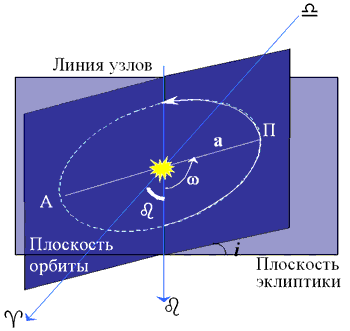
Угол i между плоскостью орбиты и эклиптикой называется ее наклонением: при 0њ £ i < 90њ космическое тело движется вокруг Солнца в прямом направлении (как Земля); при 90њ £ i < 180њ – в обратном направлении.
Точки, в которых орбита космического тела пересекается с плоскостью эклиптики, называются узлами его орбиты: восходящим узлом в направлении северного полюса эклиптики и нисходящим узлом в направлении южного полюса эклиптики.
Угол b между центром Солнца, восходящим узлом орбиты и точкой весеннего равноденствия называется гелиоцентрической долготой восходящего узла и вместе с наклонением определяет пространственное положение плоскости орбиты космического тела.
Угол w между центром Солнца, восходящим узлом орбиты и точку перигелия называется угловым расстоянием перигелия от узла, отсчитывается в плоскости орбиты в направлении движения космического тела и определяет положение орбиты в ее плоскости.
Момент прохождения перигелия t0 определяет положение космического тела на орбите в данное время.
Большая полуось
орбиты а является
средним расстоянием космического тела
от Солнца и определяет размеры его
орбиты:![]() ,
, ![]() где r1 -
расстояние космического тела от Солнца
в перигелии, r2 -
в афелии.
где r1 -
расстояние космического тела от Солнца
в перигелии, r2 -
в афелии.
Большая полуось земной орбиты принята за астрономическую единицу расстояний: аÅ = 1 а. е. = 149000000000 м.
Определением положений объектов Солнечной системы на небесной сфере по элементам их орбит (вычислением эфемерид космических тел) и определением элементов орбит космических тел на основе наблюдений их видимого движения занимается теоретическая астрономия.Для определения характеристик орбиты тела необходимо провести не менее 3 измерений экваториальных координат светила на небесной сфере
Си́ла упру́гости — сила, возникающая при деформации тела и противодействующая этой деформации.
В случае упругих деформаций является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. В простейшем случае растяжения/сжатия тела сила упругости направлена противоположно смещению частиц тела, перпендикулярно поверхности.Вектор силы противоположен направлению деформации тела (смещению его молекул).