

Третий закон Ньютона: силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине и противоположны по направлению:
![]() ,где
,где
![]() –
сила, действующая на первое тело со
стороны второго,
–
сила, действующая на первое тело со
стороны второго,![]() –
сила, действующая на второе тело со
стороны первого. Из третьего закона
следует, что в любой механической
системе материальных точек геометрическая
сумма всех внутренних сил (т.е. сил, с
которыми взаимодействуют между собой
материальные точки системы) равна нулю.
–
сила, действующая на второе тело со
стороны первого. Из третьего закона
следует, что в любой механической
системе материальных точек геометрическая
сумма всех внутренних сил (т.е. сил, с
которыми взаимодействуют между собой
материальные точки системы) равна нулю.
2.2 Динамика
вращательного движения твердого тела
Вращательное
действие силы характеризуется моментом
силы относительно точки (рис. 5а) и
относительно оси (рис. 5б). Для того чтобы
определить момент силы
относительно точки О, проведем из точки
О радиус-вектор
![]() в точку приложения силы (рис. 5а). Моментом
силы
относительно точки О называется
векторная физическая величина, равная
векторному произведению радиуса-вектора
на силу
:
в точку приложения силы (рис. 5а). Моментом
силы
относительно точки О называется
векторная физическая величина, равная
векторному произведению радиуса-вектора
на силу
:![]() Модуль
момента силы M
= rFsin
= Fd,
где d
= rsin
– плечо силы.Для того чтобы определить
момент силы
относительно оси Z,
выберем на оси Z
произвольную точку, найдем момент силы
относительно этой точки, а затем
спроецируем на ось Z
момент силы относительно точки. Таким
образом, момент силы относительно оси
– величина скалярная.Разложим силу на
три составляющие (рис. 5б):
Модуль
момента силы M
= rFsin
= Fd,
где d
= rsin
– плечо силы.Для того чтобы определить
момент силы
относительно оси Z,
выберем на оси Z
произвольную точку, найдем момент силы
относительно этой точки, а затем
спроецируем на ось Z
момент силы относительно точки. Таким
образом, момент силы относительно оси
– величина скалярная.Разложим силу на
три составляющие (рис. 5б):![]() – осевая, параллельная оси вращения,
– осевая, параллельная оси вращения,![]() –
радиальная, перпендикулярная оси
вращения,
–
радиальная, перпендикулярная оси
вращения,![]() –
касательная, перпендикулярная
и оси вращения. Составляющую
можно определить как проекцию силы
на направление вектора
,
направленного по касательной к окружности
радиусом R,
проведенной через точку приложения
силы перпендикулярно оси вращения.
Направление вектора
образует с осью Z
правовинтовую систему. Составляющие
и
вращения тела относительно оси Z
не вызывают. Вращающее действие силы
обусловлено составляющей
.
Можно показать, что момент силы
относительно оси Z
–
касательная, перпендикулярная
и оси вращения. Составляющую
можно определить как проекцию силы
на направление вектора
,
направленного по касательной к окружности
радиусом R,
проведенной через точку приложения
силы перпендикулярно оси вращения.
Направление вектора
образует с осью Z
правовинтовую систему. Составляющие
и
вращения тела относительно оси Z
не вызывают. Вращающее действие силы
обусловлено составляющей
.
Можно показать, что момент силы
относительно оси Z![]()
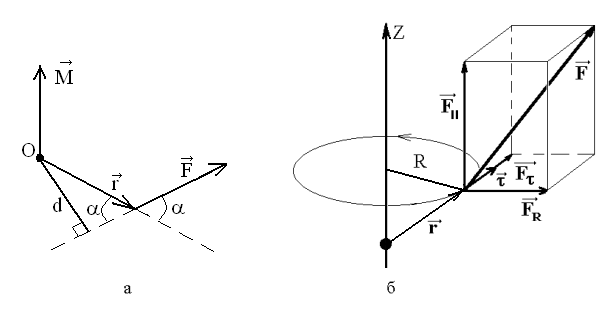
Рис. 5
Инертные свойства
тела при вращательном движении
характеризует момент
инерциииииииииииииинерции.
Он зависит от распределения массы тела
относительно оси вращения. Момент
инерции материальной точки массой m,
находящейся на расстоянии r
от оси:
![]() .
.![]() – момент инерции системы материальных
точек;
– момент инерции системы материальных
точек;![]() – момент инерции тела, где
– момент инерции тела, где
![]() – плотность тела.
– плотность тела.
Рис. 6
Момент инерции
тела относительно произвольной оси
может быть рассчитан по теореме
Штейнера:
моментинерции тела относительно оси
O'O равен сумме момента инерции тела
относительно оси, проходящей через
центр инерции и параллельной O'O, и
произведения массы тела на квадрат
расстояния между осями (рис. 6):![]() .Моментом
импульса
материальной точки относительно
некоторой точки называется векторная
величина, равная векторному произведению
радиуса-вектора
на импульс материальной точки (рис.
7а):
.Моментом
импульса
материальной точки относительно
некоторой точки называется векторная
величина, равная векторному произведению
радиуса-вектора
на импульс материальной точки (рис.
7а):![]() .
.
Моментом
импульса системы материальных точек
называется геометрическая сумма
моментов импульсов точек, составляющих
систему:![]() .Моментом
импульса материальной точки относительно
оси Z
называется скалярная величина, равная
проекции момента импульса относительно
произвольной точки, лежащей на оси Z,
на эту ось. Аналогично моменту силы
относительно оси, момент импульса
относительно оси Z
.Моментом
импульса материальной точки относительно
оси Z
называется скалярная величина, равная
проекции момента импульса относительно
произвольной точки, лежащей на оси Z,
на эту ось. Аналогично моменту силы
относительно оси, момент импульса
относительно оси Z
![]()
где p – проекция импульса на направление вектора , направленного по касательной к окружности радиусом, проведенной через материальную точку перпендикулярно оси вращения (рис. 7б). Направление вектора образует с осью Z правовинтовую систему.
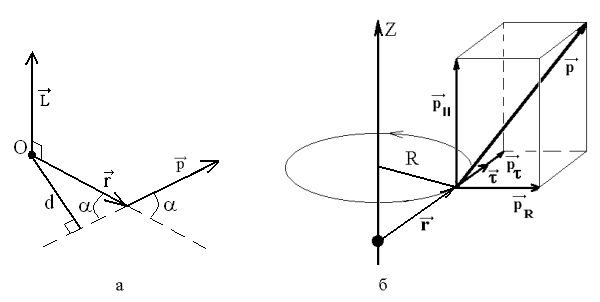
Рис. 7Момент импульса
тела относительно оси вращения LZ
= IZZ,где
IZ
– момент инерции тела относительно
оси Z,
Z
– проекция угловой скорости тела на
ось Z.
Для однородного тела, вращающегося
относительно оси симметрии:![]() .
.
Основной закон динамики вращательного движения:
Скорость изменения
момента импульса тела относительно
оси равна результирующему моменту
внешних сил относительно этой же оси
(проекция углового ускорения на ось
пропорциональна результирующему
моменту внешних сил относительно оси
и обратно пропорциональна моменту
инерции тела относительно этой же
оси):![]() Из
законов динамики поступательного и
вращательного движений следует условие
равновесия тел:
Из
законов динамики поступательного и
вращательного движений следует условие
равновесия тел:![]() 3.
Работа и механическая энергия3.1 Работа
и мощность при поступательном и
вращательном движениях
3.
Работа и механическая энергия3.1 Работа
и мощность при поступательном и
вращательном движениях
Работа
– это физическая величина, характеризующая
процесс превращения одной формы движения
в другую. В механике принято говорить,
что работа совершается силой.
Элементарной
работой силы
называется величина, равная скалярному
произведению силы на элементарное
перемещение![]() :
:![]() ,где
,где
![]() –
элементарный путь точки приложения
силы за время dt,
– угол между векторами
и
.
–
элементарный путь точки приложения
силы за время dt,
– угол между векторами
и
.
Если на систему
действуют несколько сил, то результирующая
работа равна алгебраической сумме
работ, совершаемых каждой силой в
отдельности. Работа силы на конечном
участке траектории или за конечный
промежуток времени может быть вычислена
следующим образом:![]() .Если
=
const, то А=
.Если
=
const, то А=
![]() .При
вращательном движении работа определяется
проекцией момента сил на направление
угловой скорости:
.При
вращательном движении работа определяется
проекцией момента сил на направление
угловой скорости: ,если
М
= const, то А = М.Быстроту
совершения работы характеризует
мощность. Мощностью
называется скалярная величина, равная
работе, совершаемой в единицу
времени:
,если
М
= const, то А = М.Быстроту
совершения работы характеризует
мощность. Мощностью
называется скалярная величина, равная
работе, совершаемой в единицу
времени:![]() средняямощность;
средняямощность;![]() – мгновенная мощность.При вращательном
движении мощность определяется следующим
образом:
– мгновенная мощность.При вращательном
движении мощность определяется следующим
образом:![]() .
.
3.2 Консервативные и неконсервативные силы
Консервативными
силами называются силы, работа которых
не зависит от пути перехода тела или
системы из начального положения в
конечное. Характерное свойство таких
сил – работа на замкнутой траектории
равна нулю:![]()
К консервативным силам относятся: сила тяжести, гравитационная сила, сила упругости и другие силы.
Неконсервативными силами называются силы, работа которых зависит от пути перехода тела или системы из начального положения в конечное. Работа этих сил на замкнутой траектории отлична от нуля. К неконсервативным силам относятся: сила трения, сила тяги и другие силы.