

Двухпозиционный двигатель
Двухпозиционный двигатель (рис.189) состоит из однофазного асинхронного электродвигателя 2 и редуктора 1, расположенных в общем корпусе 3. Поворот регулирующего органа (например, секторной задвижки бункера) на 180° осуществляется выходным валом редуктора 5 через муфту 7. Одновременно через шток 6 с помощью кулачкового механизма производится возвратно-поступательное движение другого рабочего органа. Двухпозиционное регулирование обеспечивается выключателем 4.
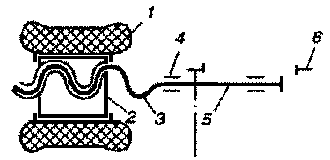
Пропорциональный исполнительный механизм (рис.190) по конструкции похож на двухпозиционный двигатель. Возможность пропорционального регулирования достигается установкой на
Рис.189. Двухпозиционный двигатель |
Рис.190. Пропорциональный исполнительный механизм |
одном валу двух электродвигателей 2. Первый вращает вал в одном направлении, второй - в противоположном. Кроме того, исполнительный механизм включает в себя редуктор 1, муфту 5 и зубчатую рейку 4. Пропорциональное регулирование (например, газового вентиля в дорожных ремонтерах) обеспечивается потенциометром 3, используемым для создания обратной связи в схеме. Электродвигательные исполнительные механизмы применяют в основном при усилии не более 53 кН.
Электромагнитный привод используется для управления механизмами в гидро- и пневмоприводах, а также различными вентилями и заслонками. Принцип работы этого привода (рис.191) состоит в
Рис.191. Электромагнитный управляющий элемент |
Рис.192. Электромашинный толкатель |
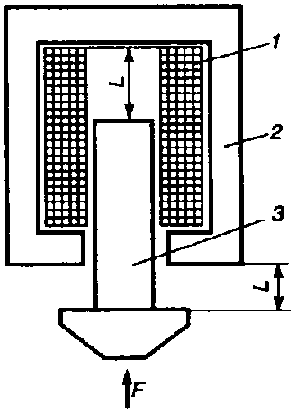
поступательном перемещении на величину L металлического якоря 3 относительно электромагнитного вала катушки 1, расположенной в корпусе 2. Различают электромагнитные приводы одно- и двустороннего действия.
В первом исполнении возврат якоря в исходное положение производится с помощью пружины, во втором - изменением направления управляющего сигнала. По типу приложения нагрузки привод бывает периодического и непрерывного действия. С его помощью осуществляется релейное (открыто - закрыто) и линейное управление.
Электромагнитные вентили (для открывания в трубопроводах клапанов) по виду используемых чувствительных элементов делят на поршневые и мембранные. При значительных усилиях и длине перемещений используют электромашинный толкатель (рис.192). Принцип его действия основан на поступательном перемещении в обе стороны оси-винта 3 относительно вращающейся, закрепленной в осевом направлении гайки 2. Вращение гайки, являющейся одновременно ротором, производится при включении в цепь питания трехфазной статорной обмотки 1. На конце винта расположен прямой участок, представляющий собой шток 5 (толкатель), перемещающийся в направляющих 4 и воздействующий на конечный выключатель 6 управляемого механизма. При необходимости толкатель работает с установленным редуктором.
89. - Назначение, устройство и работа роторных экскаваторов поперечного копания