

Распределение алгоритма процесса управления на подсистемы.
При проектировании систем управления сложными процессами для удобства эксплуатации и организации работы алгоритм системы обычно делят на подсистемы. Это дает возможность учитывать специфику работы отдельных частей системы и требований к их аппаратуре, создает условия для параллельного выполнения работы большим числом разработчиков, и сокращения времени создания системы.
Деление алгоритма системы, управляющей процессом, на подсистемы и на части внутри подсистем, определяется сложностью системы и алгоритма ее работы.
Рассмотрим основные положения, которым необходимо следовать при распределении алгоритмов по подсистемам.
1. Алгоритм подсистемы должен удовлетворять следующим условиям:
а) алгоритм задачи, решаемой подсистемой, должен иметь минимальное число связей с остальными подсистемами как по количеству цепей передачи данных, так и по объему и времени обмена данными,
б) алгоритм подсистемы должен иметь автономный контроль работоспособности;
в) алгоритм должен соответствовать требованиям к аппаратуре подсистемы как по условиям работы, так и по надежности и достоверности работы, а также возможность использования выпускаемой промышленностью и имеющейся в продаже аппаратуры.
2. Деление алгоритма системы на алгоритмы подсистем в ряде областей связано с традиционным распределением зон ответственности и специфики работы, которые необходимо учитывать. Например, система управления кораблем делится на подсистемы управления навигацией, управления двигателями, управления связью и т.п.
3. При делении на подсистемы необходимо учитывать сложность их алгоритмов, которые определяют длительность и затраты на создание программного обеспечения (ПО) подсистемы. Близкие объемы ПО подсистем при одновременном их изготовлении, способствуют сокращению времени на создание системы.
Например, структурная схема деления системы на подсистемы может иметь вид, показанный на Рисунке 10. Система имеет пять входных каналов, по которым подаются данные. Каждый канал передает определенные величины, имеющие заданное число разрядов и время или частоту поступления.
Система имеет три выходных канала (1В, 2В, 3В), по которым производится выдача выходных данных. Число выходных данных, поступающих по каждому каналу, их разрядность и период выдачи определены решаемым алгоритмом.
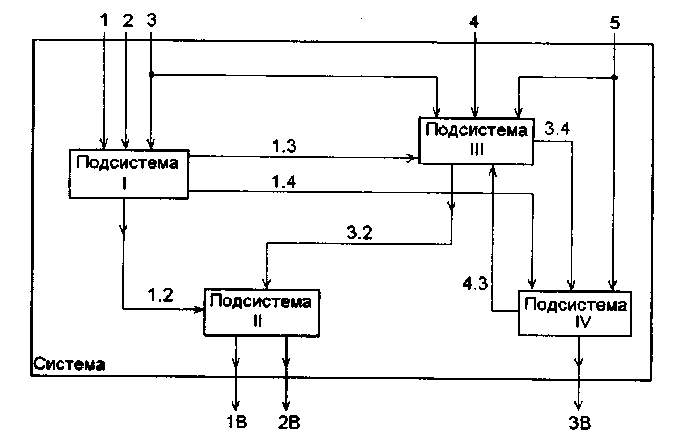
Рисунок 10 – Пример деления системы на подсистемы.
Разделим систему на четыре подсистемы. Каждая подсистема характеризуется числом входных данных, которые делятся на внешние, т.е. поступающие в систему извне, и внутренние, поступающие от подсистем системы, и числом выходных данных, которые могут быть внешними выходными данными, т.е. выдаваемые из системы, и внутренними данными, которые выдаются в подсистемы.
Подсистема 1 имеет внешние входные данные 1,2,3 и внутренние выходные данные 1.3, 1.4, 1.2.
Подсистема 2 имеет внутренние входные данные 1.2, 3.2 и внешние выходные данные 1В, 2В. Подсистема 3 имеет внешние 3, 4, 5 и внутренние — 4.3, 1.3 входные данные и выходные данные 3.2,3.4
Подсистема 4 имеет внешний вход 5 и внутренние входные 1.4, 3,4 данные и внешние выходные 3В и внутренние выходные 4.3 данные.
Приведенные данные по количеству связей в системе и между подсистемами можно представить в виде таблицы, состоящей из трех частей. Первая часть — внешние входы в систему, вторая часть — внешние выходы из системы, третья часть — внутренние связи между подсистемами (Рисунок 11).
Общее число внешних связей у системы
![]()
где NBnci — количество внешних связей у i-й подсистемы
![]()
Bjвх— количество j внешних входных связей у i-й подсистемы, Bjвых—количество j внешних выходных связей у i-й подсистемы. Определим количество связей у каждой подсистемы
![]()
где BkB — количество k внутренних связей у i-й подсистемы.
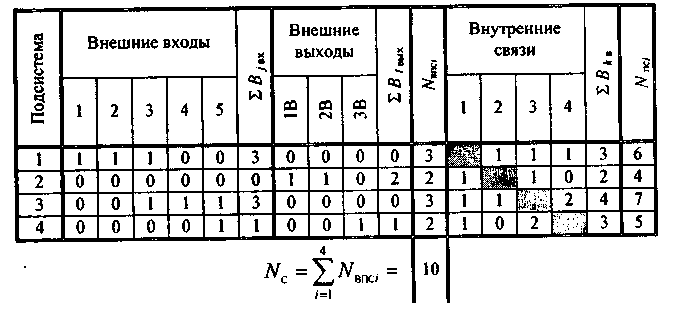
Рисунок 11 – Таблица связей между подсистемами.
Каждая связь характеризуется объемом передаваемой информации (количеством данных и их разрядностью) и цикличностью ее передачи. В ряде случаев поступление внешней информации может задаваться частотой или временем передачи данных и периодом их повторения. Возможны подобные требования и к выходной информации.
При создании системы управления процессом деление ее алгоритма на алгоритм подсистем весьма важное и ответственное решение, так как оно позволяет формально оценить трудоемкость создания системы в целом, а также определить необходимое количество и квалификацию команд разработчиков для реализации проектных решений для каждой подсистемы.
Рациональное распределение алгоритма между подсистемами сокращает затраты на их эксплуатацию и способствует повышению эффективности работы. Затраты на изготовление системы, состоящей из подсистем, их совместная отладка и проверка во многом определяются приведенными выше положениями о разделении алгоритма системы на подсистемы.