

М инистерство
образования и науки Российской Федерации
инистерство
образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
 «Уральский
государственный горный университет»
«Уральский
государственный горный университет»
Кафедра электрификации горных предприятий
КУРСОВОЙ ПРОЕКТ
по дисциплине: «Системы управления электроприводов»
Выполнил:
студент группы
ЭГП-08
Галлямов А. И.
Проверил:
Карякин А.Л.
Екатеринбург, 2012г.
 Задание
на курсовую работу по дисциплине «Системы
управления электроприводов»
Задание
на курсовую работу по дисциплине «Системы
управления электроприводов»
Фамилия, Имя, Отчество |
Галлямов Айдар Илдусович |
|
Группа |
ЭГП-08 |
|
Тип двигателя |
А200L2 |
|
Высота оси вращения, мм |
200 |
|
Мощность, кВт |
45 |
|
Частота вращения, об/мин |
2940 |
|
КПД,% при нагрузке |
100% |
93 |
75% |
93,2 |
|
Коэф. мощности при нагрузке |
100% |
0,9 |
75% |
0,89 |
|
Номинальное напряжение , В |
380 |
|
Номинальный ток, А |
81,46 |
|
Кратность пускового тока |
8 |
|
Кратность пускового момента |
2,6 |
|
Кратность максимального момента |
4,0 |
|
Момент инерции, кг*м2 |
0,13 |
|
Подписи: Студент
« » 2011г Преподаватель
 Содержание
Содержание
1 |
Математическое описание электродвигателя |
2 |
||
|
1.1 |
Расчет параметров математической модели электродвигателя |
2 |
|
|
1.2 |
Построение графиков переходных процессов и электромеханической характеристики двигателя |
7 |
|
|
1.3 |
Расчет параметров модели двигателя и построение графиков переходных процессов при регулировании частоты вращения изменением напряжения на обмотке статора |
10 |
|
|
1.4 |
Расчет параметров модели двигателя и построение графиков переходных процессов при регулировании частоты вращения изменением частоты питающего напряжения |
13 |
|
2 |
Системы скалярного управления |
15 |
||
|
2.1 |
Синтез и анализ замкнутой по скорости системы скалярного управления |
15 |
|
3 |
Системы векторного управления |
20 |
||
|
3.1 |
Синтез и анализ системы векторного управления с ориентацией по потокосцеплению ротора |
20 |
|
4 |
Промышленные преобразователи частоты |
31 |
||
5 |
Логические системы управления электроприводом |
36 |
||
|
5.1 |
Синтез структурной схемы конечного автомата логической системы управления реверсивным электроприводом |
38 |
|
Заключение |
46 |
|||
Литература |
47 |
|||
1 Математическое описание электродвигателя
1.1 Расчет параметров математической модели электродвигателя
Упрощенная математическая модель асинхронного двигателя:



где
 - напряжение на статоре;
- напряжение на статоре;
 - активное
сопротивление статора;
- активное
сопротивление статора;
 - полный ток статора;
- полный ток статора;
 - потокосцепление
статора;
- потокосцепление
статора;
 - угловая частота
вращения магнитного поля статора;
- угловая частота
вращения магнитного поля статора;
 - напряжение на
статоре;
- напряжение на
статоре;
 - активное
сопротивление ротора;
- активное
сопротивление ротора;
 - полный ток ротора;
- полный ток ротора;
 - потокосцепление
ротора;
- потокосцепление
ротора;
 - число полюсов;
- число полюсов;
 - угловая частота
вращения ротора;
- угловая частота
вращения ротора;
 - взаимная
индуктивность между обмотками статора
и ротора;
- взаимная
индуктивность между обмотками статора
и ротора;
 - полная индуктивность
фазы статора,
- полная индуктивность
фазы статора,
 ;
;
где
 - индуктивность
рассеяния обмотки статора;
- индуктивность
рассеяния обмотки статора;
 - полная индуктивность
фазы ротора,
- полная индуктивность
фазы ротора,
 ;
;
где
 - индуктивность
рассеяния обмотки ротора;
- индуктивность
рассеяния обмотки ротора;
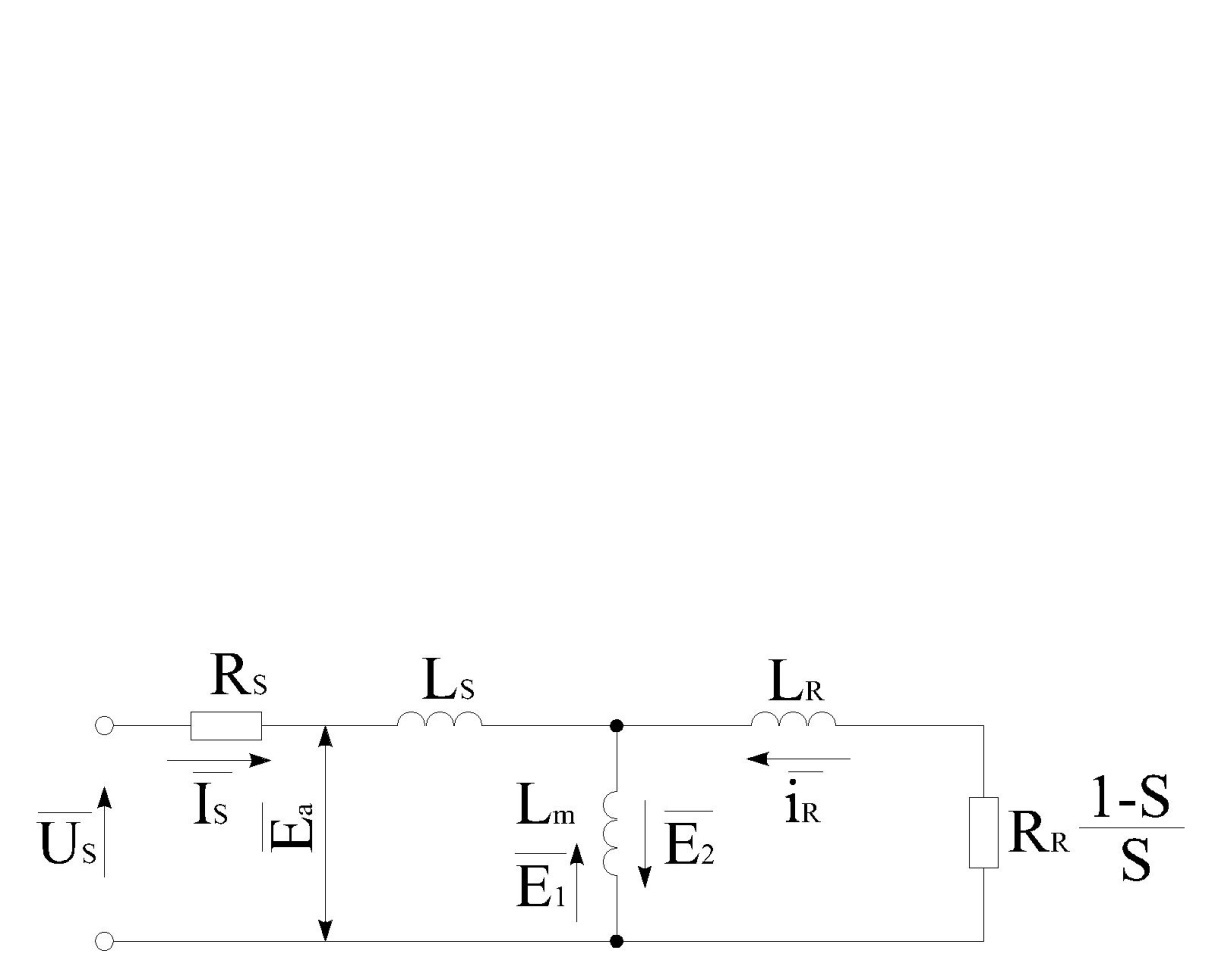
 Рисунок
1 – Т-образная схема замещения машины
Рисунок
1 – Т-образная схема замещения машины
Таблица 1 – Исходные данные двигателя А200L2
-
Параметр
Значение
Ед. изм.
Мощность
45
кВт
Частота вращения
2940
об/мин
Номинальное напряжение
380
В
cos φ при 100% загрузке
0,9
cos φ при 75% загрузке
0,89
η при 100% загрузке
0,93
η при 75% загрузке
0,932
Кратность пускового тока
8
Кратность пускового момента
2,6
Кратность максимального момента
4
Момент инерции
0,13
кг·м2
Параметры асинхронной машины рассчитываем по следующим выражениям [1]:
Номинальный ток статора:

Пусковой ток:

Номинальное фазное напряжение:
 В.
В.
Скорость вращения магнитного поля (синхронная скорость):
 об/мин.
об/мин.
Номинальное скольжение:

Критическое скольжение:

Скорость вращения магнитного поля (синхронная скорость):
 (1/c).
(1/c).
Номинальная угловая скорость вращения вала:
 (1/c).
(1/c).
Номинальный момент:
 Нм.
Нм.
Максимальный момент:

 Нм.
Нм.
Пусковой момент:
 Нм.
Нм.
Механические потери:
 Вт.
Вт.
Коэффициент приведения :

Приведенное активное сопротивление ротора:
 Ом.
Ом.
Активное сопротивление статора:
 Ом
Ом
Индуктивное сопротивление Хн:
О м,
м,
где

Индуктивное сопротивление статора:

Индуктивное сопротивление ротора:

Приведенная индуктивность рассеяния статора и ротора:
 Гн
Гн
По окончании расчета определяем коэффициент приведения :
 .
.
и сравниваем его с ранее принятым коэффициентом с. Из расчета следует, что добились минимальной разницы между с и с1

Сопротивление взаимоиндукции ХМ [5]:
 ,
,
где

Индуктивность цепи намагничивания:
 Гн.
Гн.
Индуктивность статора:

 Индуктивность
ротора:
Индуктивность
ротора:

Коэффициент магнитной связи статора и ротора:

Коэффициент рассеяния машины:

Таблица 2 – Расчетные величины
-
Параметр
Значение
Ед. изм.
Номинальная частота вращения ротора

307,72
с-1
Номинальный момент Мн
146,2368
Н·м
Пусковой момент Мп
380,2158
Н·м
Номинальный ток статора Iн
81,46
А
Критическое скольжение sкр
0,15746
Активное сопротивление статора RS
Приведенное активное сопротивление ротора


Ом

Ом
Индуктивность статора LS
0,045
Гн
Приведенная индуктивность рассеяния статора и ротора


Гн
Индуктивность цепи намагничивания
0,044
Гн