

33. Составление уравнений колебаний методом урав-нений Лагранжа 2-го рода
В![]()
![]() большинстве задач деформируемое
состояние системы определяется n
обобщенными координатами q1,…qn
- кинетическую энергию масс T
и потенциальную сил упругости U
можно представить в виде зависимостей:
большинстве задач деформируемое
состояние системы определяется n
обобщенными координатами q1,…qn
- кинетическую энергию масс T
и потенциальную сил упругости U
можно представить в виде зависимостей:
T=T(q1,…,qn); U=U(q1,…,qn)
Б![]() удем
считать, что внешние силы P
таковы, что работа их пропорционально
вариациям перемещений:
удем
считать, что внешние силы P
таковы, что работа их пропорционально
вариациям перемещений:
![]()
Тогда Ji-инерционные силы и Si-упругие силы можно записать как:
![]() (1)
(1)
![]() (1)
(1)
Запишем условие равновесия с помощью возможных перемещений:
![]()
П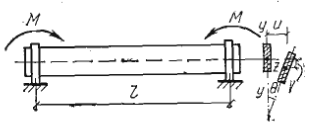 одставим
в это уравнение равенства (1):
одставим
в это уравнение равенства (1):
![]()
-уравнение движение Лагранжа (2).

(пунктир продолжить и обозначить перемещения по вертикали и горизонтали)
Для такой системы кинетическая энергия массы m:
![]()
q1 и q2- перемещения
Потенциальная энергия деформации стержней:
![]()
![]()
![]()
Возможная работа силы P на перемещениях δq1 и δq2:
![]()
![]()
Находим производные для i=1:
Аналогично находим производные для i=2
Подставляем в (2),получаем:
34. Устойчивость плоской формы изгиба
При большой разнице между моментами инерции изгибаемой балки, когда неустойчивой становится плоская форма изгиба.
Рассмотрим устойчивости балки с постоянным прямоугольным сечением по длине при чистом изгибе.
Балка опирается на идеальные шарниры - позволяют поворачиваться в плоскости изгиба; на опорах установлены устройства, позволяющие свободно поворачиваться балке относительно другой оси, но при этом сечения опорные не поворачиваются относительно продольной оси самой балки.
В деформированном состоянии произвольное сечение m-m сместится по вертикали и горизонтали v и u, а также повернется на угол Ɵ
EIz и EIy – изгибная жесткость относительно осей z и y соответ.
GId – жесткость при кручении:
![]() -
ф-ла Тимошенко.
-
ф-ла Тимошенко.
ДУ для изгиба в 2-х плоскостях при кручении в упругой стадии:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
u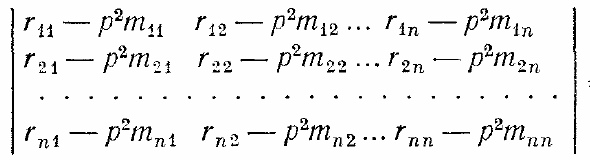 и Ɵ содержаться в 2-х последних уравн.,
рассмотрим их, 1 раз дифференцируем (3)
и Ɵ содержаться в 2-х последних уравн.,
рассмотрим их, 1 раз дифференцируем (3)
![]()
Из этого выражения находим подставляем в (2):
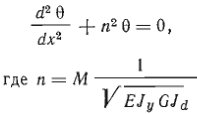
Решение уравнения:
![]()
Ищем const A и B, гранич. Усл.:
X=0, Ɵ=0 A=0, Bsin(nl)=0
B=0 соответствует изгибу без потери устойчивости. Примем sin(nl)=0, что возможно при nl=π, 2π, 3π…
Практическое значение из бесконечного числа корней имеет наименьший nl= π, ему соответствует критический момент:
![]() -
критический момент потери устойчивости
плоской формы изгиба полосы.
-
критический момент потери устойчивости
плоской формы изгиба полосы.
35.Собственные частоты и формы колебаний
Частота свободных колебаний системы называется собственной.
П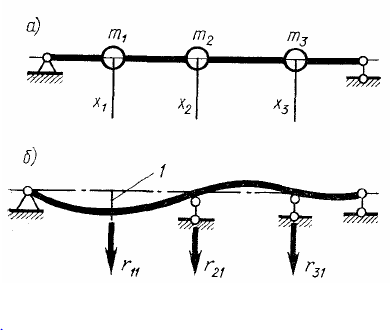 ри
свободном колебании возмущающие силы
отсутствуют и уравнение движения
является однородным:
ри
свободном колебании возмущающие силы
отсутствуют и уравнение движения
является однородным:
![]() (1)
(1)
Решение системы:
![]() (i=1,2…n)
(i=1,2…n)
p- угловая частота; ui- const;
φ- фаза колебаний.
Подставим xi (1) и сократим на sin(pt+ φ):

(i=1,2…n). Это система уравнений однородных линейных относительно ui.Эта система имеет решения только при определителе равном нулю:
Δр2=
= 0
– частотное (вековое) уравнение. Если
положение системы, от которого
отсчитывается перемещения xi,
является положением устойчивого
статического равновесия, то n
корней уравнения действительны и
положительны
система с n
степенями свободы имеет n
собственных частот. В общем случае все
корни, а значит и частоты, различны.
0
– частотное (вековое) уравнение. Если
положение системы, от которого
отсчитывается перемещения xi,
является положением устойчивого
статического равновесия, то n
корней уравнения действительны и
положительны
система с n
степенями свободы имеет n
собственных частот. В общем случае все
корни, а значит и частоты, различны.
Каждой собственной частоте pk соответствует опред. форма колебания, т.е. опред. соотношение между всеми амплитудными перемещениями ui.
Обычно формы и частоты собственных колебаний нумеруют от меньшего к большему: k=1-min, k=n-max.
К![]() аждому
k
отвечает решение уравнения в виде:
аждому
k
отвечает решение уравнения в виде:
-движение в соответ. с этим уравн. – главные колебания системы.
Т![]() .к.
уравн. движения-линейное, то линейная
комбинация решений:
.к.
уравн. движения-линейное, то линейная
комбинация решений:
В это уравнение входит 2n const C1k и C2k (k=1,2…n)это общее решение системы (1).