

13. Общая и местная система координат. Матрица преобразований (направляющих косинусов)
Каждый стержень в конструкции имеет свою ориентацию. Поэтому при расчете вводится понятие местной , или локальной (связанной с осью стержня) и общей для всей конструкции систем координат Общую систему координат можно также называть глобальная.
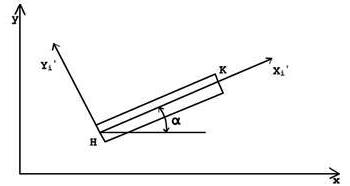
На рис. 1 x'i-y'i - местная , а х-у - общая система координат.
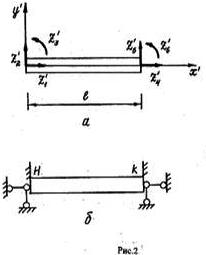
На рис. 2, а изображен конечный элемент в местной системе координат , связанной с его осью, а также отмечены направления узловых перемещений Z1’, Z2’, …, Z6’, являющихся компонентами вектора Zi =(Z1’ Z2’ …Z6’)T в этой системе координат Местная система координат - это такая система координат, в которой ось X направлена вдоль конкретного стержня, а ось Y перпендикулярно. Эта модель имеет форму квадратной матрицы, размером 6х6, схематически обозначается Ri’, где индекс i означает, что это матрица жесткости стержня с номером i, а значок штриха наверху означает, что система координат предполагается местная (локальная). В общем виде матрицу Ri’ можно представить следующим образом:
![]()
Поскольку стержни в конструкции могут быть расположены произвольным образом, возникает необходимость перехода от матрицы жесткости Ri`, построенной в местной системе координат к матрице жесткости Ri, определенной в общей системе координат . Преобразование можно произвести по следующей формуле:
![]()
В формуле матрица V представляет собой матрицу перехода из одной ортогональной системы координат в другую.
Мы получаем математическую модель одного (любого) стержня произвольной плоской стержневой конструкции в общей системе координат. Она представляет собой матрицу, размером 6х6, схематически обозначается Ri, получить ее можно в результате матричной операции (4).
Рассмотрим теперь КЭ в составе рамы, расположенный под углом а к оси X в
общей системе осей координат.
Необходимо перейти от матрицы реакций [r] j в местной системе осей координат к матрице [г] в общей системе координат.
Задачу решаем следующим образом. В начале построим матрицу [c]j, которая преобразует перемещения КЭ {z}] в общей системе осей координат в перемещения {v}j, по выражению
{v}j = [c]j {z}j
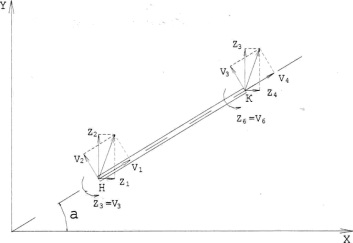
V1 = Z1 cosa + Z2 sina
V2 = -Z1 sina + Z2 cosa
V3 = Z3
V6 = z6
V4 = Z4 cosa + Z5 sina
V5 = -Z4 sina + Z5 cosa
В матричной форме приведенная выше запись будет иметь вид
![]()
или в блочной форме
![]()
где для жесткого узла
![]()
для шарнирного узла
![]()
Так как мы рассматриваем плоские упругие системы, то векторы узловых усилий и узловых перемещений, как для отдельного элемента, так и для сооружения в целом, связаны между собой линейно
{S}'j =[r]j'{V}j - в местной системе осей координат.
{S}j=[r]j{Z}j - в общей системе осей координат
Кроме того
{V}J = [c]J{Z}J,
Аналогично
{S}j '= [c]j{S}j,
где {S}' ,{S}-узловые усилия КЭ соответственно, в местной и общей системах осей координат. Тогда
{S}j = [с]j-1 {S}j = [c]j-1 [r]j' {V}j= [c]j-1 [r]j '[c]j{Z}j
Для матрицы направляющих косинусов выполняется равенство
[c]j-1 =[c]jT
Тогда {S}j = [c]jT [r]j '[c]j{Z}.
Обозначим
[r]j = [c]jT[r]j '[c]j - это выражение и является формулой для вычисления матрицы жесткости КЭ в общей системе осей координат.
При формировании матриц жесткости отдельных элементов [r]j' должны быть зафиксированы начало и конец каждого стержня, так как от этого зависит знак угла а, определяющего ориентацию стержня в общей системе осей координат XOY.