

1)Полная
система уравнений строительной механики.
Полная система уравнений состоит из
статических(уравнения равновесия),
геометрических(уравнения связи между
перемещениями и деформациями) и
физических(плоское напряженное
состояние, плоская деформация) уравнений.
Стержневая система находится в равновесии
тогда, когда уравновешены как ее стержни,
так и узлы.
 -статическое
уравнение равновесия. Где
-статическое
уравнение равновесия. Где -матрица
уравнения равновесия;
-матрица
уравнения равновесия;
 -вектор
внутренних усилий;
-вектор
внутренних усилий;
 -
вектор внешних сил. Уравнения связывающие
перемещение в узлах с деформациями
стержней являются геометрическими
уравнениями.
-
вектор внешних сил. Уравнения связывающие
перемещение в узлах с деформациями
стержней являются геометрическими
уравнениями.
 -геометрическое
уравнение. Где
-геометрическое
уравнение. Где
 -матрица
перемещений;
-матрица
перемещений;
 -вектор
перемещений системы под действием
внешних усилий;
-вектор
перемещений системы под действием
внешних усилий;
 -вектор
деформации системы. Физическое уравнение
характеризует плоское напряженное
состояние и плоскую деформацию.
-вектор
деформации системы. Физическое уравнение
характеризует плоское напряженное
состояние и плоскую деформацию.
 -физическое
уравнение. Где
-физическое
уравнение. Где
 -матрица
деформаций;
-матрица
деформаций;
 -вектор
внутренних усилий;
-вектор
внутренних усилий;
 -вектор
заданных деформаций(за счет неточности
изготовки детали и действия температуры).
-вектор
заданных деформаций(за счет неточности
изготовки детали и действия температуры).
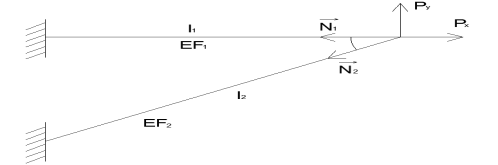
2)Уравнения равновесия. Матрица уравнений равновесия. Стержневая система находится в равновесии тогда, когда уравновешены как ее стержни, так и узлы. В стержнях фермы при узловой нагрузке возникают только продольные силы.
Составим уравнения равновесия для узла 1
 ;
;
Запишем систему в матричной форме: , где
 -матрица
уравнений равновесия.
-матрица
уравнений равновесия.
 -вектор
внутренних сил;
-вектор
внутренних сил;
 -вектор
внешних сил.
-вектор
внешних сил.
 ;
;

 -матрица
напряжений.
-матрица
напряжений.
m-столбцы; n-строки. Если n>m, то система геометрически изменяема. Если n=m, то система статически определима. Если n<m, то система статически неопределима.
3) Геометрические уравнения. Принцип двойственности.Стержневая система, соединенная в узлах, должна оставаться соединенной в этих же узлах и после деформации. Уравнения, выражающие это положение, называются уравнениями совместности.
На рис. 8.8, а, б показаны деформации системы соответственно при смещении узла 1 на U и на V. Ввиду малости перемещений перемещения по окружности заменены перемещениями по касательной к окружности (по перпендикуляру к стержню).
Итак,
![]()

Рис. 8.8а,б
Перенеся правые части выражения (8.19) в левую и записывая полученные уравнения в матричной форме, получим
Уравнения (8.20) связывают перемещения узла (U, V) с деформациями стержней Δ1 ,Δ2,. и являются геометрическими уравнениями для системы.
Применять
для получения уравнений совместности,
приведенные выше геометрические
построения для системы с большим
количеством узлов очень сложно.
Более удобно
использовать
для этого так называемый принцип
двойственности.
Дня этого рассмотрим стержневую
систему, имеющую n
узлов и m
стержней. Все силы, действующие на
стержневую систему, делятся на внешние
и внутренние. К i-му
жесткому узлу плоской стержневой
системы могут быть приложены три
силы: Рxi—вдоль
оси Х
,PYi—вдоль
оси У; Mi—момент,
приложенный к i-му
узлу. Совокупность сил Рxi,
PYi
, Mi
образуют вектор сил, приложенных к i-му
узлу:
![]()
Совокупность
всех внешних сил, действующих на n
узлов, может быть представлена в
виде
![]()
Внутренние силы, действующие в стержне, полностью определяются тремя силами: Nj, MHj, MKj которые можно характеризовать вектором
Совокупность
всех внутренних сил, действующих во
всех стержнях, может быть представлена
в виде
![]()
Векторы S и Р не являются независимыми векторами, а связаны между собой уравнениями равновесия узлов (1)
Каждый жесткий узел может иметь три перемещения: Ui — вдоль оси Х, Vi—вдоль оси У; φi— поворот.
Совокупность перемещений Ui, Vi, φi образует вектор перемещений i-го узла :
Очевидно,
что работа внешних сил, приложенных к
i-му узлу, равна скалярному произведению
вектора внешних сил
Рi
на
вектор перемещений того же узла Zi
с коэффициентом ½:
![]() Второе
произведение является матричной записью
скалярного произведения. Аналогично
для всей стержневой системы можно
записать
Итак,
каждому вектору внешних сил Р соответствует
вектор перемещений
Z
таким образом, чтобы их скалярное
произведение давало работу. Подобные
векторы в последующем будем называть
двойственными
векторами.
Второе
произведение является матричной записью
скалярного произведения. Аналогично
для всей стержневой системы можно
записать
Итак,
каждому вектору внешних сил Р соответствует
вектор перемещений
Z
таким образом, чтобы их скалярное
произведение давало работу. Подобные
векторы в последующем будем называть
двойственными
векторами.
Запишем выражение для работы внутренних сил в i-м стержне
где As-работа внутренних сил в i-м стержне; Δ— вектор деформаций i-го стержня.
Вектор
Sj имеет вид
,
Δj
-![]()
Запишем выражение для работы внутренних сил для всей системы
![]()
Аналогично предыдущему, векторы S н Δ являются двойственными. Очевидно, что из условия совместности деформаций система стержней, объединенная узлами до деформации, остается такой же системой, объединенной теми же узлами и после деформации (можно по заданному вектору перемещений узлов Z найти вектор деформаций стержней Δ). Запишем эту связь в виде (2)
где A1— матрица, связывающая перемещения с деформациями.
В силу закона сохранения энергии работа внешних сил равна работе внутренних сил:
AP = AS или (3)
Выражая
из уравнения вектор Р и вектор Δ и
подставляя эти значения в выражение
получим
![]() (5)
(5)
Соотношение(5)соблюдается при любом Z, удовлетворяющем кинематическим граничным условиям, следовательно, (4)
Таким образом, если два вектора (S,P) удовлетворяют соотношению (1), а двойственные им векторы (Δ,Z) — соотношению (2), причем их скалярные произведения равны (3), то соблюдается равенство (4). Это и есть принцип двойственности.
4.Закон гука. Физические уравнения
Для
любой стержневой системы можно составить
статические и геометрические уравнения.

В случае системы с жесткими узлами первая система содержит 3n уравнении, а вторая Зm (n — число узлов, m —число стержней), полное число уравнении равно 3(n+m). В эти уравнения в качестве неизвестных входят векторы S (3m), Z (Зп) и Δ (3m); полнoе количество неизвестных составляет 3 (п+ 2m). Таким образом, количество неизвестных превышает число уравнений. Для решения задачи необходимо построить еще 3m уравнений.
![]()
Рис. 8. 10
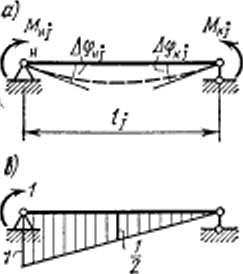
Запишем закон Гука для i-го стержня. В случае действия продольной силы имеем
![]()
Рассмотрим
случай действия моментов
Мнi,
и
Мki
(рис.
8.10.а).
Используя
метод
Мора,
определим Δφнi
и
Δφki
.Построим грузовую (рис. 8.10,6) и
единичные эпюры (рис. 8.10,«,
г)
и перемножим их между собой,
воспользовавшись формулой Симпсона:

Перепишем зависимости в матричной форме: (1)
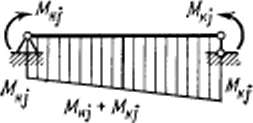
В
случае, если стержень имеет по концам
шарниры, то![]()
Аналогично, если стержень имеет один шарнир (либо Мнi=0 или Мki=0), то
Соотношение(1) справедливо для одного стержня. Придавая индексу i значение i= 1, 2, .... m, получим соотношение Гука для всей стержневой системы. В матричной форме закон Гука для всей стержневой системы имеет вид

7. Основные законы и методы вычислительной механики.
Строительная механика на современном этапе развития располагает большим арсеналом методов расчета как дискретных систем (например, состоящих из стержней), так и континуальных (сплошных) конструкций и их элементов, таких как пластины, плиты, оболочки, массивы.
Расчет напряженно-деформированного состояния дискретной конструкции, как правило, приводит непосредственно к решению систем алгебраических уравнений. Пример этому – широко применяемые при расчете плоских и пространственных стержневых систем классические методы сил и перемещений.
Для расчета континуальных систем используются более сложные математические модели и соответственно численные методы. Так, основные зависимости между геометрическими и физическими величинами в механике сплошных сред выводятся с помощью элемента бесконечно малых размеров. Соотношения между средними значениями этих величин, предполагая их непрерывность, распространяются с бесконечно малых элементов на всю рассматриваемую область. Таким образом, появляются дифференциальные, интегральные или интегро-дифференциальные уравнения, вместе с граничными и начальными условиями они образуют математическую модель соответствующей задачи. К сожалению, точное решение в аналитической форме прикладных континуальных задач возможно лишь в очень немногих случаях, поэтому особо важное значение приобретают приближенные, но достаточно общие методы их решения. В последние десятилетия эти методы, называемые также численными, получили особенно активное развитие в связи с применением в инженерной практике современных вычислительных средств.