

Ответы на контрольные вопросы
по дисциплине «Теория автоматического управления»
(часть 1)
1. Объект управления
Объект управления – это устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления (САУ). Функции объекта управления заключаются в восприятии управляющих воздействий и изменении в соответствии с ними своего технического состояния. ОУ не выполняет функций принятия решений, а только реагирует на внешние (возмущающие) воздействия, изменяя свои состояния предопределённым его конструкцией образом.
2. Принцип управления «по возмущению».
На вход регулятора попадает сигнал, пропорциональный возмущающему воздействию. Отсутствует зависимость между управляющим воздействием и результатом этого действия на объект.
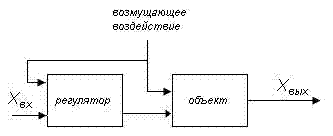
Рис. 1. Принцип управления «по возмущению».
Достоинство принципа: быстрота реакции на возмущения. Он более точен, чем принцип разомкнутого управления. Недостаток: невозможность учета подобным образом всех возможных возмущений.
Примеры: Трезвый водитель за рулем регулирует подачу газа, сверяя скорость автомобиля с дорожной обстановкой. Ребенок прекращает кидать монетки в автомат, когда видит, что газировка кончилась.
3. Принцип управления «по отклонению».
Обратная связь образует замкнутый контур. На управляемый объект подается воздействие, пропорциональное сумме (разности) между выходной переменной и заданным значением так, чтобы эта сумма (разность) уменьшалась.
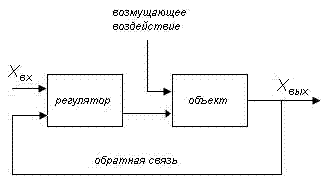 Рис.
2. Принцип управления «по отклонению».
Рис.
2. Принцип управления «по отклонению».
Примеры: системы автоведения поезда, управление самолётом по приборам.
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
4. Динамическая характеристика линейной системы управления (лдс).
Динамической характеристикой является характеристика, определяющая реакцию системы на некоторое типовое входное воздействие. Таковыми являются переходная характеристика, импульсная характеристика, частотные характеристики. В качестве воздействий могут использоваться: единичное ступенчатое воздействие, описываемое единичной ступенчатой функцией; единичное импульсное воздействие, описываемое дельта-функцией; гармоническое колебание единичной амплитуды.
5. Передаточная функция линейной стационарной непрерывной динамической системы
Передаточной функцией называется отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала при нулевых начальных условиях.
Для стационарных объектов с сосредоточенными
параметрами передаточная функция —
это дробно-рациональная функция
комплексной переменной![]() :
:

6. Классификация типовых детерминированных воздействий, используемых для исследования динамических систем
Единичная ступенчатая функция — специальная математическая функция, чьё значение равно нулю для отрицательных аргументов и единице для положительных аргументов.
Единичная импульсная функция — производная от единичной ступенчатой функции. Характеризует собой импульс бесконечно-большой амплитуды, протекающий за бесконечно-малый промежуток времени. Геометрический смысл — площадь, ограниченная данной функцией равна 1.
![]()
7. Переходная характеристика динамической системы
Переходной характеристикой называется
реакция системы на единичное ступенчатое
входное воздействие![]() .
.
